點火器用有限轉(zhuǎn)角電動機設(shè)計與仿真
2019-09-25 08:44:40楊小青王永嘉
微特電機 2019年9期
楊小青,王永嘉,王 佳
(陜西航天時代導(dǎo)航設(shè)備有限公司,寶雞 721000)
0 引 言
點火器以往的保險與解除保險裝置為機械式,靠人工操作完成,飛行時點火器處于解除保險狀態(tài),易出現(xiàn)誤點火故障。為了解決該問題,在點火器內(nèi)部使用有限轉(zhuǎn)角電動機,點火器在需要點火時,通過電動機完成自動解除保險動作,可提高飛行人員及設(shè)備的安全,國內(nèi)在該方向的工程應(yīng)用較少。傳統(tǒng)的有限轉(zhuǎn)角電動機多為永磁式力矩電動機,一般由定子、轉(zhuǎn)子和電刷三部分組成[1],結(jié)構(gòu)復(fù)雜,生產(chǎn)成本較高,且電動機自身不包含位置指示部分,即不能反映出此時電動機旋轉(zhuǎn)的角度,需要外接專用的位置指示裝置。在大量級的力學(xué)環(huán)境條件下,電刷與換向器接觸不可靠,導(dǎo)致電動機輸出信號異常,達不到點火器使用要求。
為了克服上述缺點,本文采用一種新型的有限轉(zhuǎn)角電動機結(jié)構(gòu),省去了電刷、換向器和永磁體,外形尺寸變小,勵磁方式為螺線管,通電后繞組產(chǎn)生軸向磁場,定子、轉(zhuǎn)子的工作面為曲面結(jié)構(gòu),在磁場的作用下,轉(zhuǎn)子將沿著氣隙減小的方向旋轉(zhuǎn)運動,定子部分包含限位裝置,確保電動機的運動角度。位置指示裝置被集成在電動機內(nèi)部,整體結(jié)構(gòu)簡單,外形尺寸小,工作壽命長。
本文對有限轉(zhuǎn)角電動機的結(jié)構(gòu)進行了研究,建立了電動機的數(shù)學(xué)模型,計算電動機的主要性能指標,并對其進行了仿真分析,將仿真結(jié)果與實測值進行比較,驗證了模型的準確性。
1 工作原理
電動機主要由電動機部件和位置指示裝置兩個功能部件組成,電動機部件的作用是為點火器電點火管、旋轉(zhuǎn)隔板安裝提供支撐和約束,并在規(guī)定的條件下,能夠為負載的旋轉(zhuǎn)運動提供必要的扭矩,在規(guī)定的時間內(nèi)完成解鎖功能;位置指示裝置可以通過輸出相應(yīng)的開關(guān)信號,指示轉(zhuǎn)軸對應(yīng)的轉(zhuǎn)角位置。
常態(tài)時電動機保持在安全位置(零位),通電后電動機轉(zhuǎn)子帶動結(jié)構(gòu)負載從安全位置旋轉(zhuǎn)到戰(zhàn)斗位置(90°),此時電動機處于解除保險狀態(tài),解除保險時間要求為不大于50 ms;斷電后復(fù)位彈簧將轉(zhuǎn)子拉回至安全位置,此時電動機恢復(fù)保險狀態(tài),恢復(fù)保險時間要求為不大于100 ms。
電動機部件主要由定子、轉(zhuǎn)子、彈簧組成。定子包含端蓋組件、線圈組件和殼體,轉(zhuǎn)子由軸和磁極組成,位置指示裝置由電刷組件和滑環(huán)組件構(gòu)成,電刷組件與殼體通過螺釘固聯(lián),電動機結(jié)構(gòu)簡圖如圖1所示。將電動機的初始位置定義為電動機的安全位置,此時電動機輸出低電平表示其所處的位置,通電后繞組產(chǎn)生磁場,轉(zhuǎn)子處于線圈組件內(nèi)部,受到磁場的作用和磁力線總是沿著磁阻最小的路徑通過[2],磁極與端蓋組件之間相吸產(chǎn)生力矩,電動機軸向存在限位,不能運動,徑向則克服彈簧的初始力矩,沿著氣隙減小的方向旋轉(zhuǎn),電動機旋轉(zhuǎn)至90°時,電刷組件和滑環(huán)組件之間導(dǎo)通,輸出高電平,電動機處于解除保險狀態(tài);電動機斷電后,彈簧帶動轉(zhuǎn)子和負載返回至零位位置,電動機處于恢復(fù)保險狀態(tài)[3]。

圖1 電動機結(jié)構(gòu)簡圖
2 方案設(shè)計
2.1 工作點力矩計算
2.1.1 安全位置時力矩計算[4]
(1)
式中:Gδ為氣隙磁阻;μ0為真空磁導(dǎo)率;S為工作面積;δ為氣隙。
IN=BSR總
(2)
式中:I為工作電流;N為匝數(shù);B為氣隙磁密;R總為電動機總的磁阻。
(3)
式中:F為電動機工作時產(chǎn)生的力。
2.1.2 戰(zhàn)斗位置時力矩計算
Gδ=4×10-7H
B′=5.04 T
磁路飽和,按鐵心最大磁通密度計算。
2.2 飽和點計算
電動機從安全位置旋轉(zhuǎn)至戰(zhàn)斗位置的過程中,磁路可能出現(xiàn)飽和,飽和后隨著氣隙的減小,磁感應(yīng)強度不再增大,此時電動機的輸出力矩穩(wěn)定在一個狀態(tài)下,直至旋轉(zhuǎn)至戰(zhàn)斗位置,通電電壓不同,則磁密的飽和點不同。
氣隙與工作角度α之間的關(guān)系:
δ=δ0-0.032α
(4)
式中:δ0為起始氣隙。
氣隙磁密:
(5)
DC24 V時,電動機飽和時的工作角度為47°,DC33 V時電動機飽和工作點為36°。
2.3 解鎖時間計算
電動機在開通過程中的力矩平衡方程式[5]:
(6)
式中:Te為電動機的電磁轉(zhuǎn)矩;TL為彈簧扭矩;J為轉(zhuǎn)動慣量;ω為角速度。
電磁轉(zhuǎn)矩計算公式:
Te=12.2B2S
(7)
TL=k0+k1α
(8)
式中:k0為彈簧初始力矩;k1為彈簧的彈力系數(shù);α為彈簧運轉(zhuǎn)角度。其中B的取值在飽和前按計算值使用,飽和后按飽和磁密計算。
2.4 恢復(fù)保險時間計算
彈簧帶動電機轉(zhuǎn)子返回至起始位置的時間為恢復(fù)保險時間。電動機斷電后,電磁轉(zhuǎn)矩消失,彈簧扭矩TL帶動電機返回至起始位置,電動機的力矩平衡方程式:
(9)
不考慮電動機裝配過程中的軸系摩擦力矩等其它因素。
3 數(shù)學(xué)模型的建立
根據(jù)電動機的工作狀態(tài),建立Simulink仿真模型,如圖2、圖3所示。通過仿真,可以求出電動機通電過程中轉(zhuǎn)矩、電流、轉(zhuǎn)子位置等隨時間的變化關(guān)系,最終得到電動機的解除保險時間和恢復(fù)保險時間。
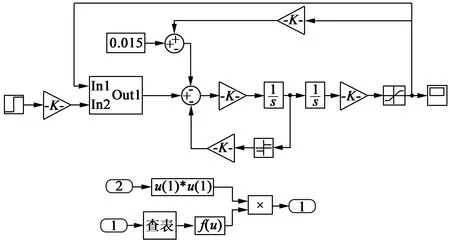
圖2 電動機解除保險時間計算模型
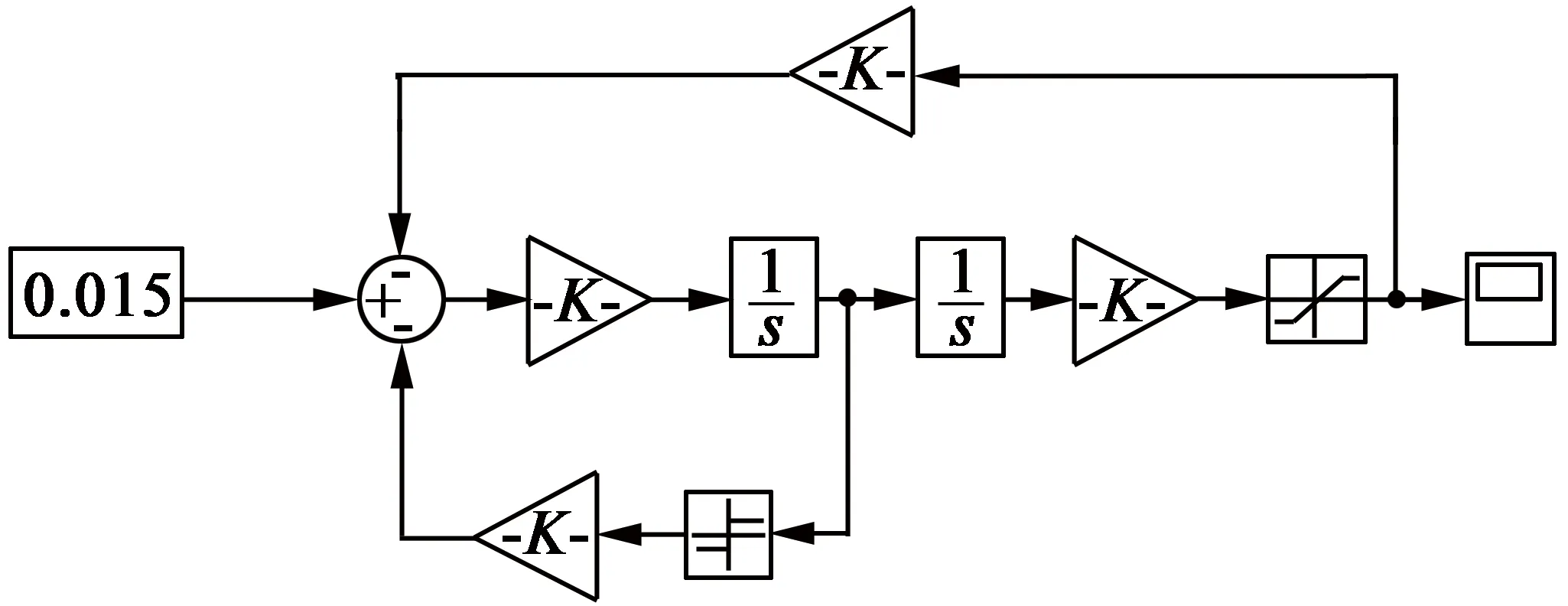
圖3 電動機恢復(fù)保險時間計算模型
4 仿真結(jié)果與實測數(shù)據(jù)對比
根據(jù)模型計算結(jié)果,得出電動機在DC24 V/DC33 V電壓下的解除保險時間分別為36.43 ms,21.05 ms,恢復(fù)保險時間為31.68 ms。
統(tǒng)計21臺電動機實測數(shù)據(jù),DC24 V/DC33 V電壓下的解除保險時間分別為29~34 ms,23~27 ms,恢復(fù)保險時間為34~40 ms,滿足用戶指標要求。
電動機的實物如圖4所示,已成功配套于某型號點火器,進入批量生產(chǎn)階段。
圖4 樣機實物圖
如圖5所示,DC24 V/DC33 V下電動機的解除保險時間差異較大,主要是因為電動機的輸出力矩差異較大,具體表現(xiàn)為電流大小和飽和點的差異。電壓越大,輸出電流越大,飽和點的角度越小,則電動機在很短的時間內(nèi)輸出力矩達到最大;相對的,電動機的轉(zhuǎn)動速率越高,則解除保險時間越短。恢復(fù)保險時間計算如圖6所示。
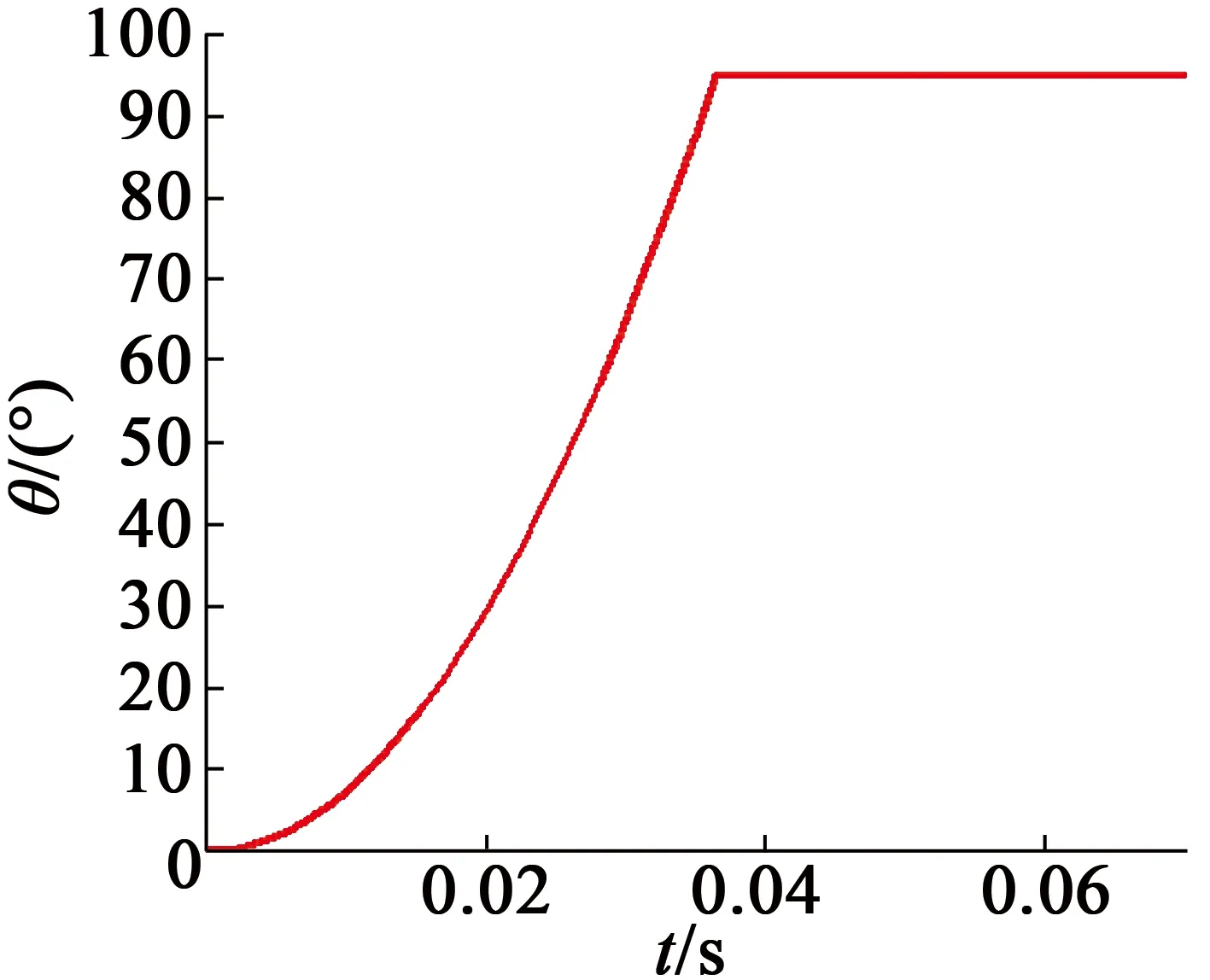
(a) DC24 V
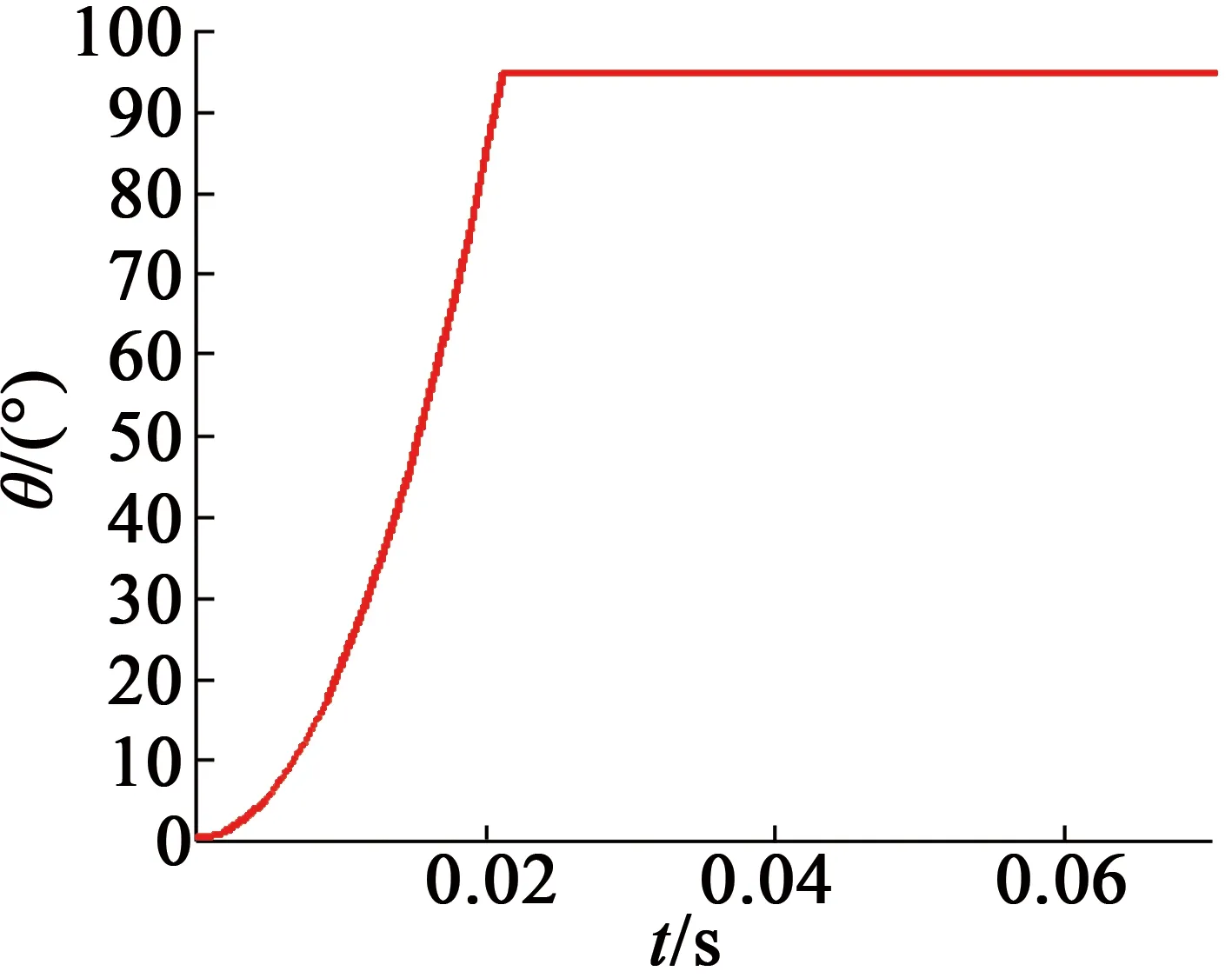
(b) DC33 V
圖5解除保險時間

圖6 恢復(fù)保險時間計算
對比仿真結(jié)果和實物測試數(shù)據(jù)可以發(fā)現(xiàn),仿真結(jié)果與實測數(shù)據(jù)接近,差異較小,造成差異的原因在于:一是電動機的軸系摩擦力不同,在調(diào)整電動機軸向間隙過程中,造成每個電動機的靜摩擦力矩不同;二是彈簧的起始力矩在一個區(qū)間范圍內(nèi),實際裝配過程中,每個電動機的彈簧起始力矩不同,最終電動機的解除保險時間和恢復(fù)保險時間與仿真結(jié)果不同。
5 結(jié) 語
本文針對點火器用有限轉(zhuǎn)角電動機進行了設(shè)計分析,研究了一種新型的有限轉(zhuǎn)角電動機結(jié)構(gòu)。采用螺線管產(chǎn)生軸向磁場,利用定子和轉(zhuǎn)子的工作曲面結(jié)構(gòu),將電動機的輸出力矩從軸向方向轉(zhuǎn)變到徑向,使得電動機沿著氣隙減小的方向旋轉(zhuǎn)運動;將位置指示裝置集成在電動機內(nèi)部,通過其輸出不同的電信號來反映電動機不同的工作狀態(tài)。最后建立了Simulink仿真模型并進行了仿真,將仿真結(jié)果與實測數(shù)據(jù)進行了對比,仿真結(jié)果與實測數(shù)據(jù)接近,驗證了方案設(shè)計及模型的正確性。
