水下推進器控制系統設計與實現*
2019-09-27 01:35:52徐鵬程曾慶軍朱春磊戴曉強陳堯偉
艦船電子工程 2019年9期
徐鵬程 曾慶軍 朱春磊 戴曉強,2 趙 強,2 陳堯偉
(1.江蘇科技大學電子信息學院 鎮江 212003)(2.江蘇舾普泰克自動化科技有限公司 鎮江 212003)
1 引言
隨著科技的發展和國防的需要,水下航行器應用越來越廣泛[1],水下航行器[2]中最主要的部分是水下推進器。隨著電力推進裝置的發展,出現了把電機本體和動力推進裝置進行一體化設計的導管螺旋槳電機推進器[3]。這種水下推進器是集推進電機、減速器、螺旋槳和導流罩以及控制電路于一體的裝置,具有高集成度、控制簡單、易于安裝、維護方便、體積小、重量輕、噪聲振動小,散熱好、功率密度大、效率高、適用范圍廣等優點。由于這種導管螺旋槳電機推進器結構十分緊湊,其被廣泛應用為水下航行器的推進裝置,為國防軍事裝備建設和海洋開發發揮著越來越重要的作用[4~5]。
近年來無刷直流電機以其功率密度大、效率高、響應速度快、結構簡單、運行可靠、控制性能好等優點,得到了越來越廣泛的應用,也成為水下推進器的首選類型[6]。無刷直流電機的基本構成包括:電機本體、電子換相電路和轉子位置傳感器三大部分。電機本體主要由定子和轉子組成。電子換相電路一般由驅動部分和控制部分組成。轉子位置檢測傳感器是用于檢測電機轉子相對于定子的位置,并向控制器提供位置信號的一種裝置,因受限于使用環境和成本等問題,其逐漸被無位置傳感器技術取代[7~9]。
本文根據水下推進器的設計要求,研制了一款新型控制系統,設計并制作了電機驅動的硬件電路板,對推進器進行了水下試驗以驗證設計的正確性。
2 水下推進器結構與控制系統
2.1 水下推進器結構
本文采用的水下推進器整體結構如圖1所示。
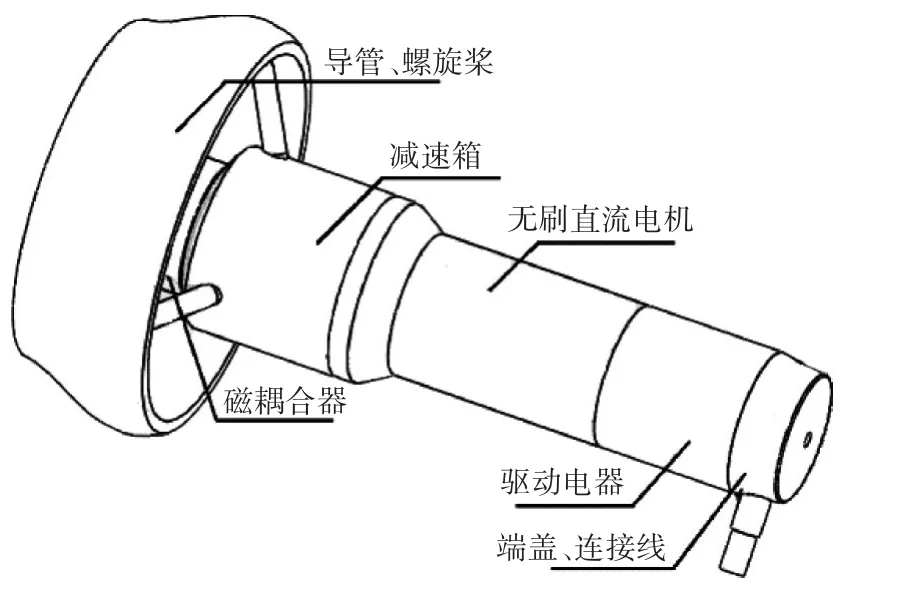
圖1 水下推進器整體結構圖
2.2 控制系統原理
控制系統的原理框圖如圖2所示,主要由電源電路、過流保護電路、接口、驅動電路、功率逆變電路、反電動勢檢測電路、JY01無刷直流電機驅動控制集成控制器等組成。
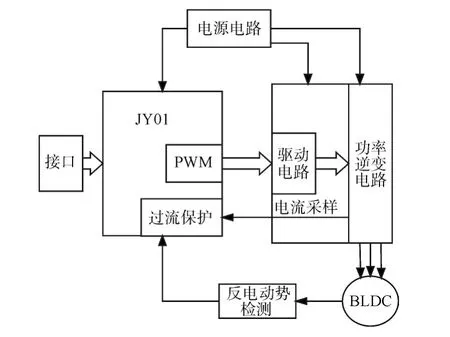
圖2 控制系統原理框圖
本文的水下推進器采用48V直流供電,由于各模塊需要不同的供電電壓,因此需要設計斬波電路給各模塊供電;為了防止逆變電路故障或者電機堵轉等原因導致電流過大損壞電機,設計了電流采樣電路,一旦電流超過允許值,就會觸發JY01控制芯片的過流保護端口,關閉所有輸出;接口負責將外部控制無刷直流電機轉向和轉速的電壓信號連接到控制系統,同時輸出無刷直流電機的轉速脈沖信號以獲得推進器的時機轉速,此外接口還給推進器的電源模塊供電;驅動電路用于驅動MOS管,功率逆變電路將直流電逆變成三相方波交流電使電機轉動;反電動勢檢測電路通過檢測三相反電動勢過零點,以判斷轉子位置[10];JY01為無刷直流電機驅動控制專用集成控制器,輸入轉向和轉速電壓信號、輸入電機轉子位置信號,輸出電機轉速信號、輸出三相全橋逆變電路上下橋臂驅動信號。
3 控制系統電路設計
3.1 設計目標
驅動電路額定功率1.5kW,供電電壓48VDC,過載保護;推進器額定轉速1800rpm且轉速可調;轉向控制正/反轉切換,推進器正向最大推力330N,反向最大推力300N。
3.2 電路設計
驅動電路、功率逆變電路原理圖如圖3所示。驅動電路由三個高速MOSTET集成驅動芯片IR2101組成,驅動由六個MOSFET組成的三相全橋逆變電路,MA、MB、MC分別連接電機定子的三相線圈。
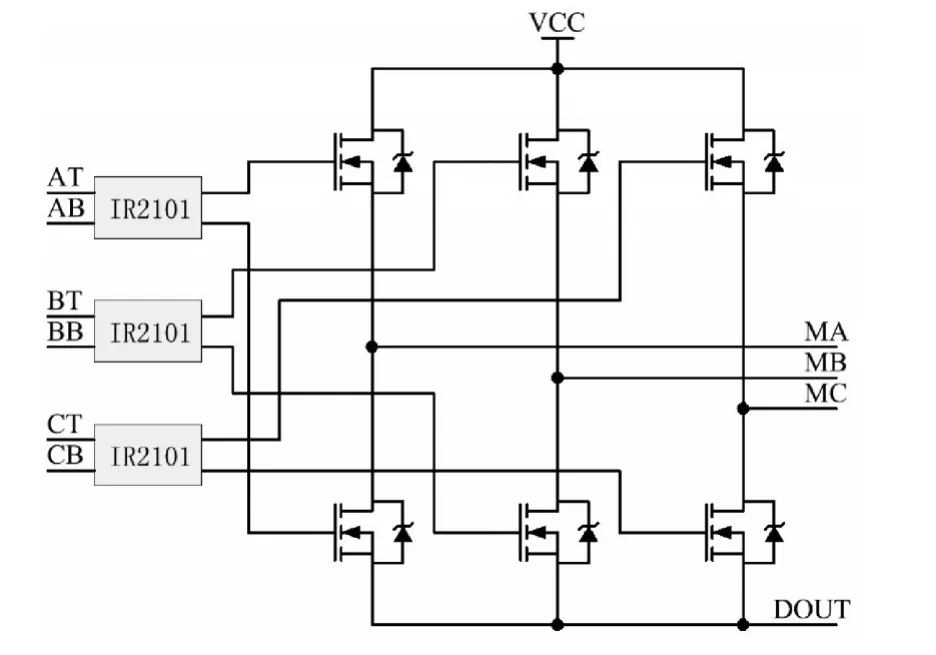
圖3 驅動電路、功率逆變電路原理圖
電源電路原理圖如圖4所示。VCC為48V直流電輸入,采用MAX5035C和2940專用電源模塊將48VDC斬波成12VDC和5VDC,分別給驅動電路和JY01芯片供電。
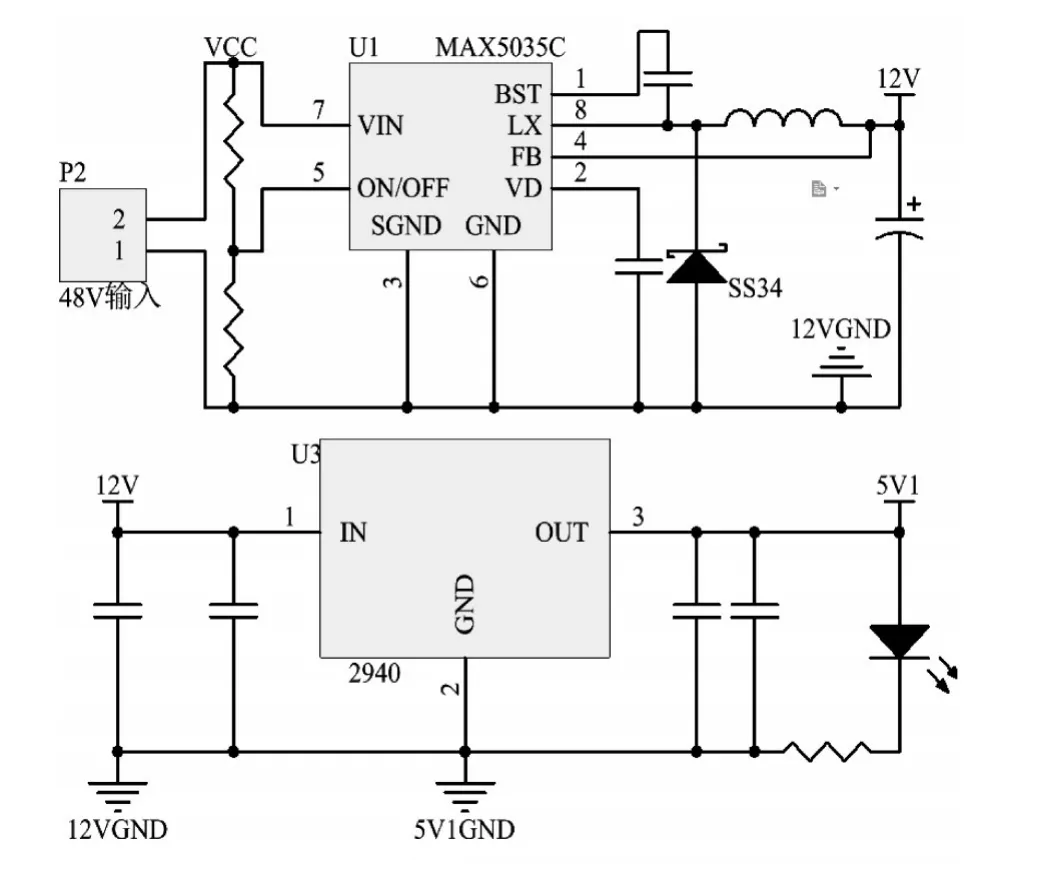
圖4 電源電路原理圖
反電動勢檢測電路原理圖如圖5所示。當檢測到非導通相的過零點,再滯后30°就是導通相的換相時刻。
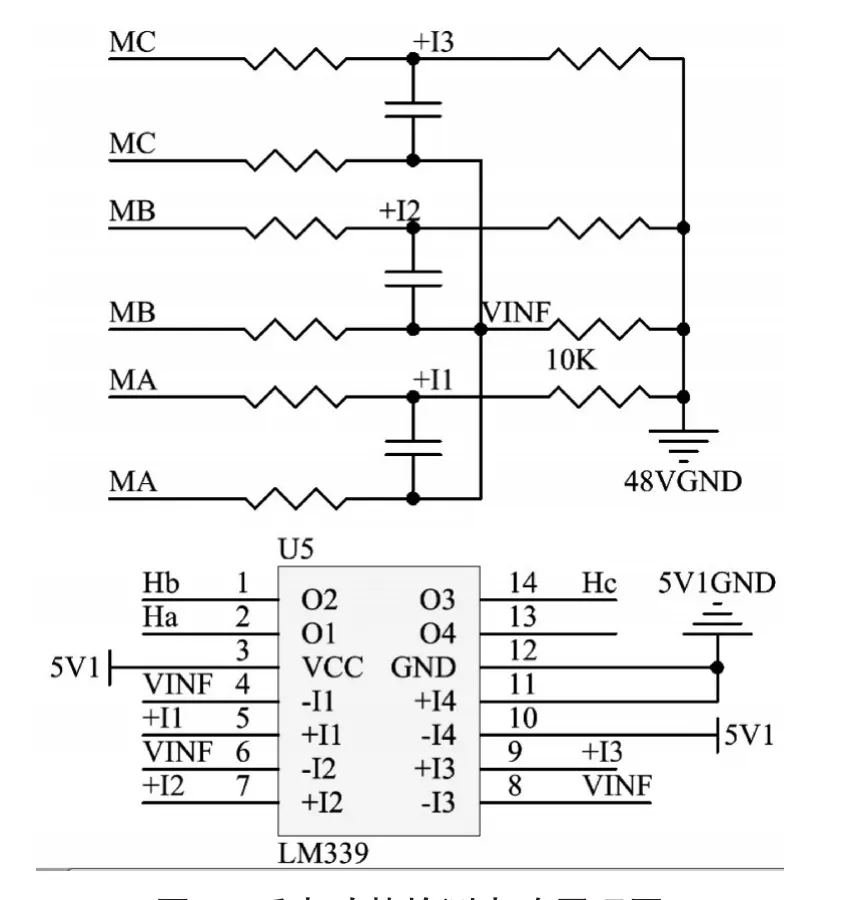
圖5 反電動勢檢測電路原理圖
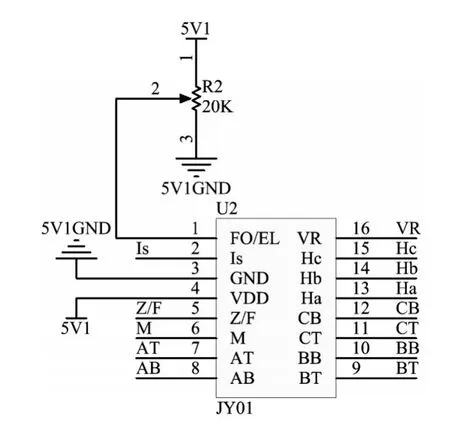
圖6 JY01控制芯片
如圖6所示,JY01為無刷直流電機驅動控制專用集成芯片,具有應用方便、外圍電路簡單、噪音小、效率高等優點。JY01共有16個管腳,其中有6個SVPWM波輸出引腳,連接驅動電路;有3個轉子位置檢測輸入引腳,通過反電動勢檢測電路輸出的電壓信號判斷轉子位置,計算換相時間;VR為電機調速引腳,輸入電壓為0~5V,隨著電壓增大,電機轉速增加;F0/EL引腳為啟動轉矩調節引腳,在無刷無霍爾電機控制方面啟動力矩設定是否合適決定了電機是否能順利啟動,啟動力矩小了電機不動或啟動困難,啟動力矩過大電機抖動厲害或偶爾在啟動時有反轉現象,所以必須設定一個合適的啟動力矩值;Is為過流保護引腳,JY01有過載保護和電流異常保護功能,當Is腳電壓達到0.1V時,過載監控啟動,并進入恒流狀態,保持驅動電流的恒定,此時驅動電流不再隨著VR端的電壓升高而升高,也不會隨著負載的增大而增大,在此狀態JY01會繼續為電機提供持續恒定的驅動功率,保持電機的正常運行;Z/F引腳為轉向控制腳,JY01具有軟換向功能此功能在很多應用中起到了的保護了功率管和電機作用,提高了運行的可靠性的使用壽命,當電機正在向一個方向轉動時Z/F電平發生變化,驅動首先停止輸出,讓電機自由停止后,再向另一個方向運轉;M引腳為轉速信號輸出腳,輸出轉速脈沖信號,可用于計算電機實際轉速。
4 實物與測試
圖7為水下推進器實物圖,推進器長392mm,重10kg;圖8為控制系統電路板實物圖,電路板采用疊加式結構,上層為功率電路,下層為控制電路,有利于節省空間和屏蔽干擾。圖9為進行推進器水下測試,圖中的推力測試架根據等臂杠桿的原理設計制作[11~12],推進器的安裝如圖a所示,圖b中的推力計顯示推進器推力的數值大小。

圖7 水下推進器實物圖
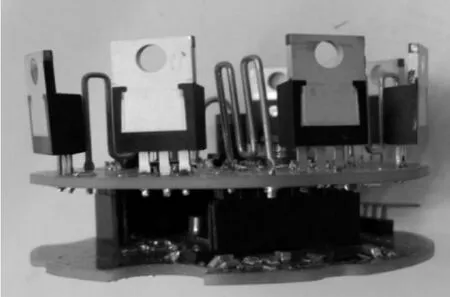
圖8 控制系統硬件電路板實物圖
推進器水下測試結果如下。
根據測試數據繪制的推力與轉速的關系曲線如圖10所示,螺旋槳順時針和逆時針旋轉的推力分別表示推進器正向和反向的推力。從圖中可以看到,推進器正向的推力最大可達360N,反向推力最大可達310N,均達到設計目標且略有超過。
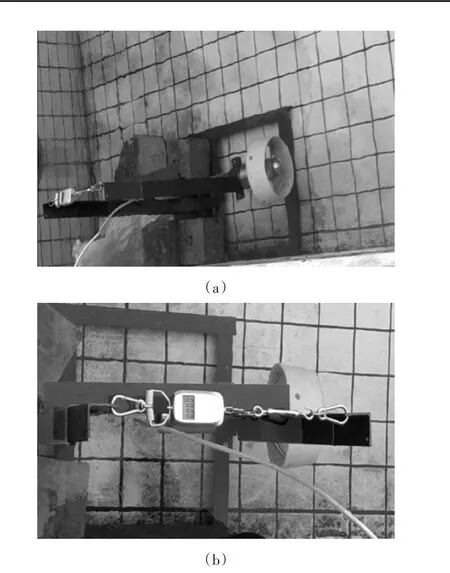
圖9 推進器水下測試
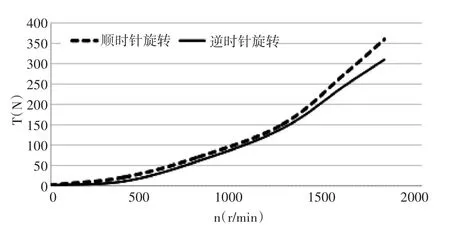
圖10 推力與轉速關系
5 結語
本文介紹了一種用于水下機器人的導管螺旋槳電機推進器的控制系統,設計與制作了推進器控制系統的硬件電路,并進行了推進器水下測試,測試結果表明,設計的控制系統能夠使推進器的正向最大推力達到360N,反向最大推力達到310N,均達到了設計目標且略有超過。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16