基于Solidworks的履帶式管道機器人結構設計與實現
2019-10-08 05:26:00張保真王戰中楊晨霞
承德石油高等專科學校學報 2019年4期
張保真,王戰中,楊晨霞
(石家莊鐵道大學 機械工程學院,河北 石家莊 050043)
近幾十年來,隨著我國科技的進步,工業的發展和經濟水平的提高,我國管道運輸建設取得了巨大的成果。到目前,中國建成油氣管道總里程已超過13萬km,建成初具規模的跨國、跨區域油氣管網[1]。油氣輸送管道腐蝕、穿孔或者破裂,都會造成油氣泄漏,進而影響周圍環境,甚至發生火災、爆炸等嚴重后果。為了保障人民的生命財產安全,社會環境的安定和自然環境不受到破壞,定期對油氣輸送管道進行檢測是十分必要的,管道機器人作為有效的檢測設備,可以代替人類執行檢測任務[2]。研究并設計具有實際工程化應用價值的管道機器人能夠極大地提高管內檢測和管內作業的準確性和可靠性,提高工作效率,使得人們可以對各類管線采用非挖掘和拆分的方式來進行探測及修復。美國GE公司、瑞士ROSEN公司等生產了流體驅動式管道機器人PIG[3],利用機器人兩端的管道內流體壓力差來提供動力,結構簡單,使用性好。美國卡內基梅隆大學和美國國家能源部共同研發了Explorer系列模塊化輪式燃氣管道檢測機器人,其采用視覺和漏磁雙重檢測手段[4]。鄧宗全等[5]針對海底管道研發出六輪驅動的輪式管道機器人。上海交通大學張云偉等[6]設計了一種基于絲杠螺母傳動,平行四邊形輪腿支撐漏磁管道檢測機器人。
1 管道機器人總體結構與工作原理
1.1 設計目標與要求
設計一輛管道機器人牽引機構,其能夠搭載管道檢測模塊、管道修復模塊和管道清理模塊,分別對管道進行檢測、修復和清理。設計的管道機器人平臺能夠適應一定的管徑變化,能夠通過垂直管道和大曲率彎管,能夠自動的適應管道直徑的變化并進行位姿調整,同時也具備定位導航系統和人機交互界面,能夠有效的控制機器人和精確地定位管道有缺陷的位置。
機器人變徑范圍為Ф340 mm~Ф450 mm;牽引力F≥200 N;機器人管內平均行進速度為8 m/min左右;機器人能在曲率半徑R大于兩倍管徑D的彎管中平穩運行;機體軸向長度在650 mm以內;多電機提供動力;機器人的機構要方便安裝和拆解。
1.2 基于Solidworks的履帶式管道機器人總體結構設計
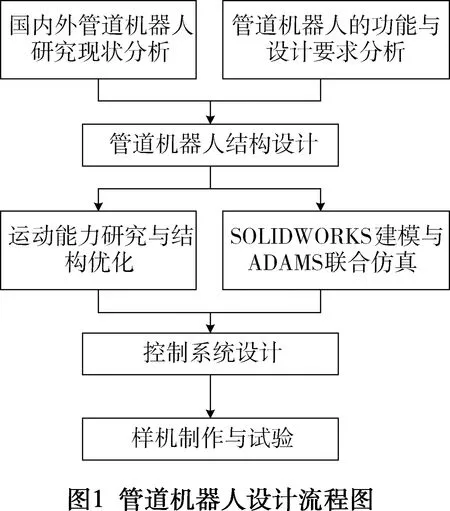
從國內外管道機器人的研究現狀出發,根據管道機器人的功能與要求,首先提出總體設計方案,進行結構設計;再設計管道機器人的控制系統,最后進行仿真研究與分析,對管道機器人的體性能進行評估,并提出改進方案。研究內容安排流程如圖1所示:

1.3 管道機器人工作原理
管道機器人的變徑機構在變徑過程中既要能順利通過障礙,又要保證其驅動輪對內管壁有足夠的壓力來提摩擦力。管道機器人的模型如圖2所示,其主要由履帶足和變徑機構組成。
變徑機構由升降機式變徑機構和絲杠螺母式變徑機構組合創新而來,整個變徑機構主要有步進電機、傳動齒輪與雙旋向滾珠絲杠副組成的主動調節機構和彈簧組等組成的被動調節機構兩部分。主動調節機構和被動調節機構最終都需通過調節三組沿管道機器人軸線間隔120°均布的支撐桿系來控制管道機器人徑向大小的變化。滾珠絲杠副沿管道機器人中心軸線布置,同步盤在導向桿的約束下與滾珠絲杠螺母固連。步進電機驅動滾珠絲杠旋轉,帶動滾珠絲杠螺母及與其固連的同步盤沿導向桿向前、向后滑動。鉸接在同步盤上的三組支撐桿系隨同步盤做往復運動,使支撐桿系張開或者收縮以適應管徑的變化。被動調節機構可以在不驅動主動調節機構的情況下幫助機器人順利通過較小的障礙,并輔助實現驅動輪緊壓在管壁上。壓力傳感器通過檢測彈簧組預緊力,間接實現變徑機構壓力信號檢測,檢測到的壓力信號作為反饋信號實現變徑機構的閉環控制。
2 行走機構與變徑支撐機構選型設計
2.1 行走機構選型設計
市場上與高校中研究最成熟且應用最為廣泛的管道機器人行走機構有支撐輪式、履帶式與螺旋驅動式。為了保證管道機器人在復雜的管道環境中可以持續穩定的工作,行走機構需要有良好的可靠性與穩定性。對常見3種管道機器人進行綜合性能比較,為管道機器人的研究開發提供參考與借鑒。比較結果見表1所示,支撐輪式管道機器人在各方面性能較優,但是履帶式管道機器人在越障方面更勝一籌。

表1 管道機器人綜合性能對比
1)選擇履帶式行走機構
考慮到自主變位三履帶足管道機器人的轉動阻力相對于爬坡阻力和拖線阻力較小,而管道機器人在爬坡時阻力顯著增大,尤其是在垂直管道中阻力是摩擦阻力與管道機器人自重及所攜帶負載的和。這里采用通過計算垂直方向的行走阻力并乘以修正系數的方法來進行分析。
管道機器人主要應用于硬質管道環境,考慮到履帶與管壁為面接觸,認為管道在此壓力下變形很小,從而直線行走時的地面變形阻力可以忽略不計,故直線行走阻力只考慮履帶裝置運行內阻力和外部行使阻力。履帶機構驅動力主要表現為履帶與地面之間的摩擦力,即附著力。外部行駛阻力主要是履帶與地面的滾動阻力,橡膠與鐵皮管道間的滾動阻力系數約0.014[7]。履帶裝置運行內阻力是由同步帶和帶輪、傳動齒輪之間的摩擦阻力形成,一般可用經驗公式計算,內阻力系數可取0.03~0.07[8]。對于加工精度高,熱處理要求高,潤滑條件好的可取較低值,本機構內阻力系數取0.06。
假設機器人凈重為G1,所能攜帶的負載為G2,取g=10,則可近似估計該管道機器人在水平管道內的直線行走阻力F1為:
F1=0.014G1+0.06G1+G2=0.074G1+G2
(1)
近似估計該管道機器人在垂直管道內的直線行走阻力F2為:
F2=0.014G1+0.06G1+G1+G2=1.074G1+G2
(2)
2)總阻力估算
設管道機器人總阻力修正系數為K=1.2,可得管道機器人的行走總阻力為
F0=KF2
(3)
3)電動機的選擇計算
假設機器人重G1=10 kg、可以攜帶負載G2=10 kg,垂直行走阻力F2為:
F2=1.074G1+G2=207.4 N
(4)
則機器人的總阻力為:
F0=KF2=1.2×207.4=248.88 N
(5)
每只履帶足的阻力為:
(6)
設帶輪節徑d=40 mm,可知,每只履帶足所受阻力矩為:
(7)
假設機器人行進速度為7 m/min,則電機輸出轉速為:
(8)
履帶足電機輸出功率P,可以通過下式求出:
(9)
(10)
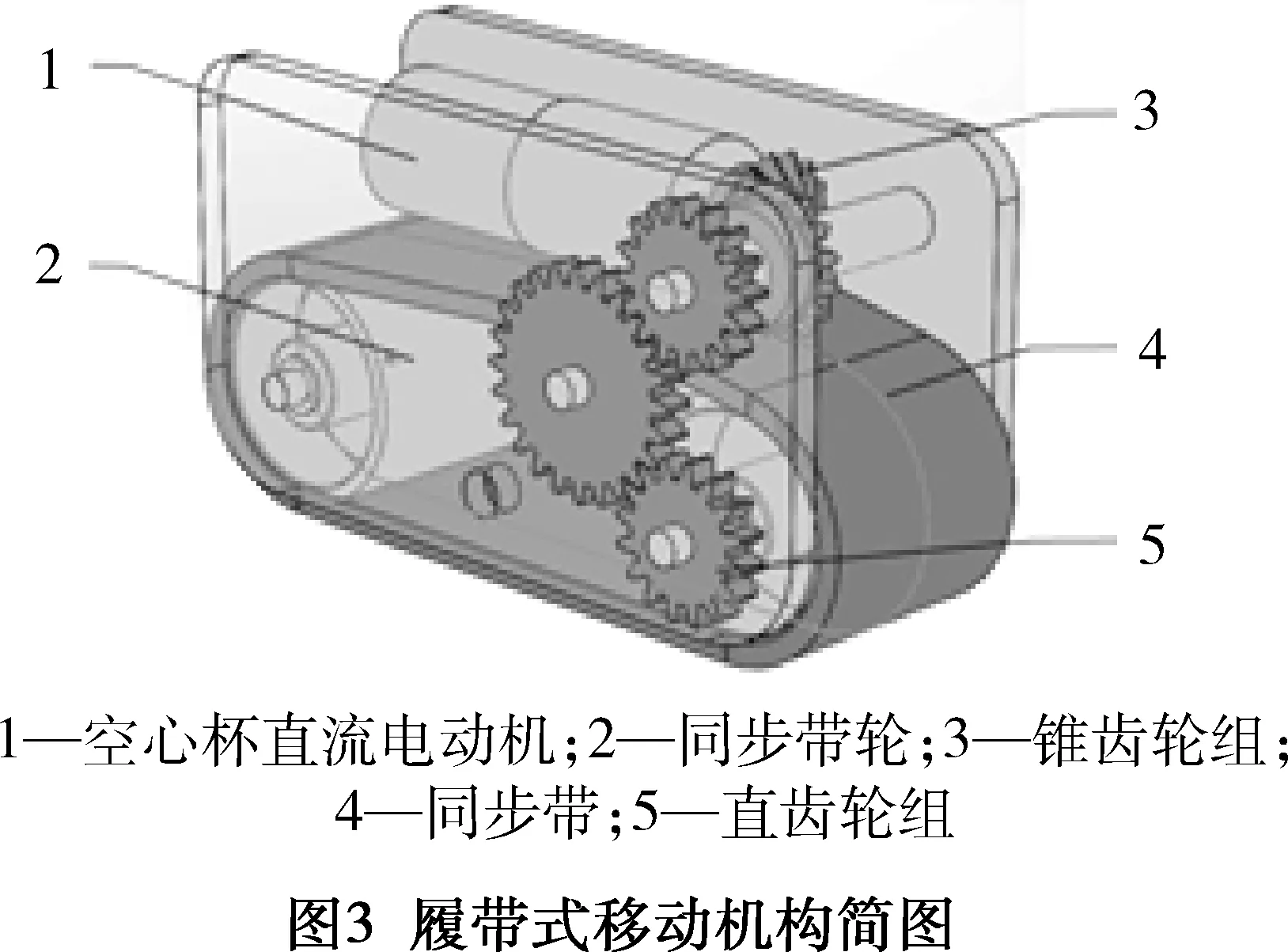
慮到管內可能碰到比較惡劣的情況,而且為越障預留一些功率,取足夠的安全系數,并考慮電機的性價比和安裝尺寸,最后選擇額定功率為20 W的瑞士maxonRE-25直流空心杯電機驅動移動機構,電機編號是118746。
在軟件Solidworks中設計裝配好的履帶式行走機構如圖3所示,實物樣機如圖4所示。

2.2 變徑支撐機構選型設計
為提高管道機器人的通用性,降低成本,所設計的管道機器人可以適應不同的管道直徑是十分必要的。現如今常用的主要變徑調節機構有彈簧支撐桿式、渦輪蝸桿—支撐連桿式、升降臺式、絲杠螺母—支撐桿式。
彈簧支撐桿式變徑結構優點是結構緊湊、簡單,可以與其他形式的變徑結構組合使用,也可以單獨使用;缺點是被動變徑機構,不能主動變徑,并且變徑范圍小,封閉力也不可控。渦輪蝸桿—支撐桿式變徑機構優點是可以主動變徑,變徑控制簡單,封閉力可以控制,且變徑范圍較大;缺點是結構不緊湊,所需驅動轉矩較大,需要大功率電機驅動,且效率低,一般很少使用。絲杠螺母—支撐桿式變徑機構優點是所取驅動力矩較小,傳動平穩,可以主動調節,封閉力也可以調控,和彈簧組合使用也可以實現被動調節,使用范圍較為廣泛;缺點是結構復雜,不緊湊,在軸向所需空間比較大。升降臺式變徑機構優點是軸向和徑向安裝尺寸緊湊,變徑范圍較大,適用于大直徑管道;缺點是在大管徑管道中使用時,所取驅動力矩較大,一般較少使用。
通過對比上述4種變徑調節機構的優點與缺點,采用絲杠螺母—三角支撐桿式變徑機構,其基于絲杠螺母變徑調節機構與彈簧變徑機構。絲杠螺母—三角支撐桿式變徑機構的原理結構簡圖如圖5 所示。

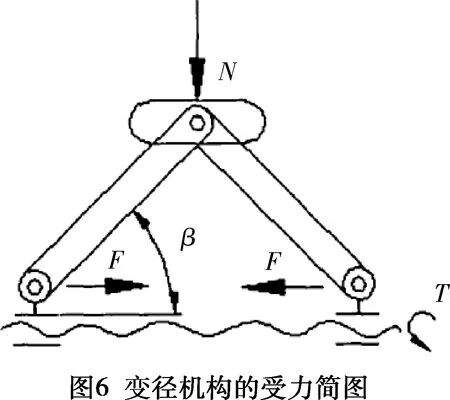
由管道機器人支撐機構的機構形式和傳動方式可以得到支撐機構在高度調節時的受力情況如6圖所示。圖中省略了支撐桿系中的彈簧,彈簧的受力為桿件的內部受力可以忽略。其中N為管壁對支撐履帶足的壓力,F為兩側絲桿螺母對滑動支座的力,β為支撐臂與其支座的夾角,T為電機傳到絲桿上的作用力矩,T電機為電機輸出扭矩,η為絲杠螺母副的傳動效率。
由圖可以得到:
(11)
又有
(12)
(13)
機器人有三個支撐臂,所以由絲杠螺母副的傳動效率η為:
(14)
由上節可知每只履帶足的輸出牽引力為82.96 N,驅動輪和管道內壁之間的摩擦系數μ取0.5,則管道內壁作用在車輪上的壓力為:
(15)
設滾珠絲杠螺母副的絲桿導程為:
Ph=4 mm
(16)
滾珠絲杠螺母副的傳動效率為:
η=0.95
(17)
當機器人支撐臂與支座夾角為25°時,F最大,T絲杠和T電機最大,此時:
(18)
T電機≈0.358 N·m
(19)
設絲桿電機的轉速n=40(rpm),則
(20)
考慮到管內越障時可能碰到比較惡劣的情況,而且預留一些功率,以使其在壓力較大的情況下仍然可以比較輕松的調整支撐系統高度,取足夠的安全系數,并考慮電機的性價比、安裝尺寸,最后選擇額定功率為4.5 W的瑞士maxonRE-16的直流空心杯電機支撐履帶足,編號是118705。
3 管道機器人物理樣機的制作與試驗
為了驗證管道機器人結構設計的合理性,進行了零件制作、樣機組裝并進行一系列的驗證試驗。
3.1 物理樣機的制作與裝配
除直流電機、電源、同步帶、同步帶輪、螺釘、螺母等標準件采購外,定制了螺母絲杠及控制硬件,其余零件零部件采用3D打印技術制作。機器人物理樣機實物圖如圖7所示。
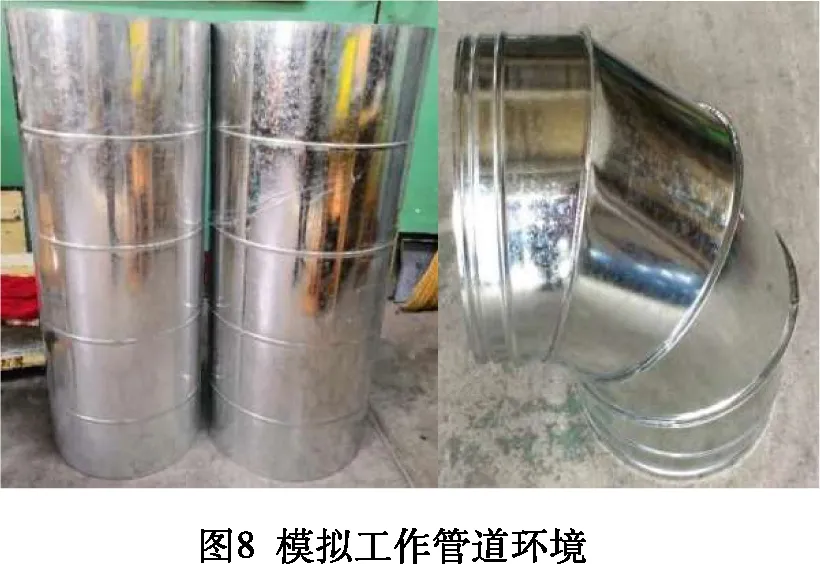
購買兩段普通黑白鐵通風管道與一段90°的大曲率彎管用于實驗平臺搭建。兩直管道直徑分別為400 mm和500 mm。彎管直徑為460 mm,曲率半徑為920 mm。管道工作環境如圖8所示。
3.2 管道機器人物理樣機試驗
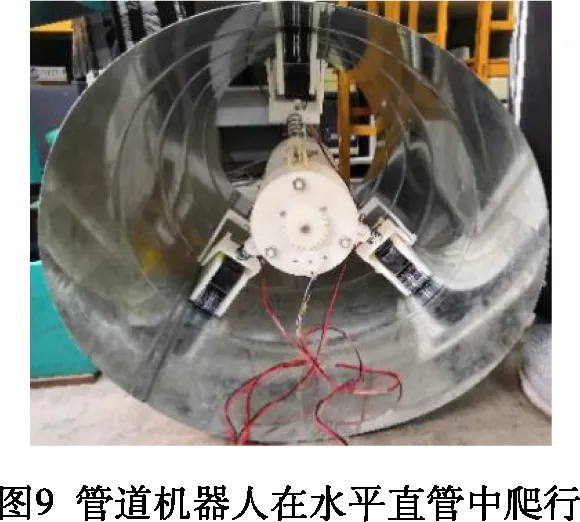
1)物理樣機在水平直管中的行走試驗
管道機器人樣機在直徑為400 mm,長度為1 600 mm的水平直管中行走試驗如圖9所示,該試驗分為兩個過程,分別為變徑過程和行走過程。變徑過程就是調節管道機器人的變徑調節機構使其適應管道直徑的大小。發現管道機器人在自主變徑過程中,由于履帶足沒有接觸到管道內壁,機器人會發生翻轉,所以設計的管道機器人在履帶足沒有接觸到管道內壁時不能自主完成變徑過程,需要人工的參與才可以順利完成變徑過程。當履帶足接觸到管道內壁時,機器人可以自主完成變徑過程。

在變徑過程完成后,履帶足貼合在管道內壁上。履帶足與管道內壁之間產生封閉力與摩擦力。管道機器人可以順利的在水平直管中行走,期間管道機器人行走平穩。
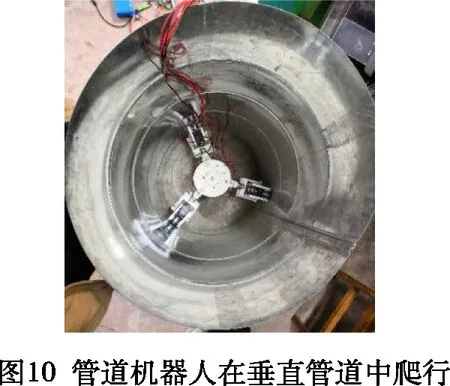
2)物理樣機在豎直管道中的行走試驗
將管道機器人在水平直管中的行走試驗中的管道緩慢豎立,在此過程中機器人在大坡度管道中行走時存在打滑情況。在管道坡度大于45°時通過調節管道機器人的變徑機構來增大機器人與管道內壁之間的封閉力,機器人可以順利的在大坡度與豎直管道中平穩行走。通過試驗可以知道采用履帶式行走機構可以提供更大的附著力,可以使機器人在大坡度與豎直管道中爬行。
4 結論
根據管道機器人的設計要求,并對比分析螺旋驅動式、履帶式、支撐輪式管道機器人綜合性能的強弱,提出了可自主變徑的履帶式管道機器人。利用Solidworks軟件進行了建模與組裝,分析其工作原理。管道機器人的行走機構選型為履帶式行走機構,并選取額定功率為20 W的瑞士maxonRE-25直流空心杯電機作為驅動電機。通過對比4種變徑調節機構的優點與缺點,提出了絲杠螺母—三角支撐桿式變徑機構,該機構基于絲杠螺母變徑調節機構與彈簧變徑機構,并選取額定功率為4.5 W的瑞士maxonRE-16直流空心杯電機作為驅動電機。
通過組裝試驗樣機,搭建試驗平臺進行實驗,設計的管道機器人可以順利的在管道中通行。但是也發現機器人的穩定性較差,需要對履帶式管道機器人的機構做進一步的改進優化設計。
