城軌車輛救援工況下的牽引力及制動力控制分析與研究
2019-10-14 20:25:27曹增明周利彭駒
科技風 2019年11期
曹增明 周利 彭駒

摘 要:本文在闡述城軌車輛連掛救援工況牽引力及制動力控制方案的基礎上,分析了當前城軌車輛連掛工況牽引力及制動力控制方案存在的主要問題,并重點就城軌車輛連掛工況下的牽引力及制動力控制方案優化進行了分析和研究。
關鍵詞:城軌車輛;牽引制動力;連掛控制
1 城軌車輛連掛控制方案
城軌車輛的連掛功能通常用于重聯運營、牽引調車或在其他緊急救援工況下與共線運營的其他列車進行連掛,列車與列車間的連掛通常通過車鉤來實現機械連接和空氣管路連接、通過車鉤或者連接器來實現電氣連接等,詳見下圖所示:
目前城軌車輛普遍采用的車鉤機械鉤頭通常采用35型車鉤,其抗壓載荷(屈服強度)約為850kN、抗拉載荷(屈服強度)約為1250kN。
2 城軌車輛連掛救援控制方案分析
2.1 城軌車輛救援工況下的牽引力和制動力分析
以上海16號線項目車輛為例進行城軌車輛連掛工況下的牽引力和制動力分析:
AW3工況下Tmc車重64.6t,M車重65.243t,三節編組列車整車重194.443t,六節重連列車整車重388.886t;
AW3、40‰坡道牽引工況下,按列車最大平均啟動加速度值為1.0m/s2計算,一列六節編組列車救援一列六節編組列車上坡所需牽引力約為1171.474kN。
AW3、40‰坡道工況下,按列車最大平均減速度值為13m/s2計算,一列六節編組列車救援一列六節編組列車下坡緊急制動所需制動力約為1275.19kN。
2.2 城軌車輛救援工況牽引和制動力控制方案分析
由以上分析可知:
(1)在AW3、加速度1.0m/s2、40‰坡道工況下,一列六節編組列車救援一列六節編組列車上坡所需牽引力約為1171474k>車鉤最大抗壓載荷(屈服強度)850kN,已超出車鉤的可承受范圍;
(2)在AW3、減速度1.3m/s2、40‰坡道工況,一列六節編組列車救援一列六節編組列車下坡緊急制動所需制動力約為1275.19kN(故障車可以施加制動)>車鉤最大抗拉載荷(屈服強度)1250kN,已超出車鉤的可承受范圍;
(3)在AW3、加速度1.0m/s2、40‰坡道工況下,一列六節編組列車救援一列六節編組列車上坡過程中施加減速度為1.3m/s2的緊急制動,車鉤所承受的力將遠遠超過車鉤的可承受范圍。
3 城軌車輛救援工況牽引力、制動力控制方案優化
3.1 城軌車輛救援工況牽引力、制動力控制方案優化分析
為保證車輛行車安全和考慮連掛救援工況下故障車牽引力、制動力已切除的實際應用情況,分析城軌車輛連掛救援的極端工況下的牽引力、制動力控制方案。
3.1.1 車鉤所能承受的牽引力分析
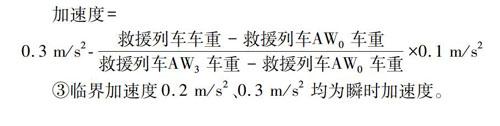
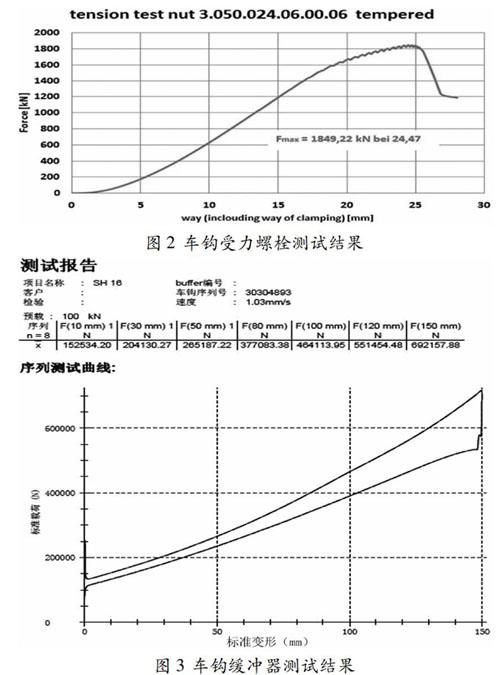
考慮當6節編組列車救援6節編組列車,在列車聯掛好但未進入救援模式、列車進行牽引后立即施加緊急制動的極端惡劣情況,對車鉤受力螺栓和緩沖器進行測試,測試結果如下:
在基于車鉤仿真計算,各種工況下車鉤所能接受的牽引力如下(不考慮有效質量,控制車鉤受力在800kN以下):
3.1.2城軌車輛救援工況牽引力、制動力控制方案優化分析
3.1.2.1 牽引力控制優化分析
根據以上計算和車鉤可受力情況,考慮滿足上海16號線實際運營線路最大坡道30‰車輛可啟動、6節重連救援車可發揮的最大牽引力為400kN、最大緊急制動力為566kN,故障車無牽引力和制動力的情況的實際情況,最大可達到的牽引加速度計算結果如下:
上坡:無需限制;
〖JP4〗下坡:加速度=(120+228.8971-38.1106)/828.168=03753m/s2;
平直道:加速度=(160-38.1106)/828.168=0.1471 m/s2。
從以上救援方案優化的計算條件和分析來看,為保證車鉤受力在800kN以下,在救援模式的各種工況下:當列車在平直軌道運行時,加速度需維持在0.1471 m/s2~0.2542m/s2范圍內,而當列車在30‰軌道運行時,加速度需維持在0.3753m/s2~0.5271m/s2范圍內,從而導致救援工況下的列車常用制動和快速制動距離增長。
3.1.2.2 制動力控制優化分析
基于安全考慮,任何情況下車輛的緊急制動功能都需滿足,因此制動力控制的優化建議保留車輛的緊急制動能力,其他制動模式的制動力不大于緊急制動力。
3.2 城軌車輛救援工況牽引力、制動力控制方案優化建議
由于連掛救援工況為極端惡劣的情況,在考慮列車有效質量和車輛僅在列車起動瞬間存在列車起動阻力等因素后,建議優化后的列車連掛救援方案如下:
(1)救援工況下的牽引加速度限制方案如下:
①優化方案適用AW0、AW2、AW3載荷下的3節編組列車救援3節編組列車、6節編組列車救援3節編組列車及6節編組列車救援6節編組列車在平直道、坡道上的各種救援工況。
②考慮列車坡道起動,救援牽引工況下的全列車重量按救援車重量+故障車重量之和計算;加速度根據載荷變化在0.2 m/s2~0.3 m/s2范圍內實時調整,救援工況下的列車加速度實時調整方法如下:
(2)救援工況下的列車制動力限制方案如下:
①適用AW0、AW2、AW3載荷下的3節編組列車救援3節編組列車、6節編組列車救援3節編組列車及6節編組列車救援6節編組列車在平直道、坡道上的各種救援工況。
②救援制動工況下的全列車重量按僅按救援車重量計算。
③救援工況下,列車的常用制動力、快速制動力不超過緊急制動力。
4 結語
本文分析了城軌車輛連掛控制方案及救援工況下牽引力、制動力控制方案存在的問題,給出了救援工況下城軌車輛牽引力、制動力控制的優化建議,并在上海軌道交通16號線工程車輛的3節編組和6節編組正線混跑及救援中得到了驗證,為在線自動聯掛、混合編組救援技術在我國城軌車輛項目上提供了參考和實踐經驗。
參考文獻:
[1]南車株機公司.上海軌道交通11號線南段工程車輛技術規格書[G].株洲南車株機公司,2010.
[2]柳曉峰.上海軌道交通16號線地鐵多種受流牽引方式集成設計[G].電力機車與城軌車輛,2014(1).
[3]曹增明.上海軌道交通16號線列車重聯技術研究與應用[J].電力機車與城軌車輛,2015(4).