全自動可擴縮餐桌
2019-10-21 07:03:07李潮崔承勛
科學與財富 2019年35期
李潮 崔承勛
摘 要:由于中國人口多,導致住房緊張,在一間小屋子里有時連吃飯的桌子在不用的情況下都得收起來,十分麻煩。本文設計了一款全自動可擴縮餐桌,只需對它語音控制,它就能自動打開桌子,將桌子的面積增大一倍多。省時省力,不需要將桌子來回拆卸。
關鍵詞:可擴縮;全自動;餐桌
一、序言
當今社會房價不斷飆升,城市住房日益擁擠,家里的活動空間也是越來越小。一般家里的餐桌面積都較小,只夠坐4-5人。而當家中有親朋好友來作客時,由于餐桌太小,一般都采用加一個大面積的桌板放在原有的桌子上的方法來解決。而大桌板較重,體積大,在狹小的房間里移動很不方便,并且由于長期放置,需要花費時間清洗,十分麻煩【1】。而本文針對這個問題,所設計的餐桌具有大桌和小桌兩種模式,用戶可以根據需要選擇不同的模式。兩種模式之間的切換也十分快速,只需要半分鐘的時間。兩種模式的切換只需要用戶對它進行語音控制即可,方便快捷【2】。
二、結構設計
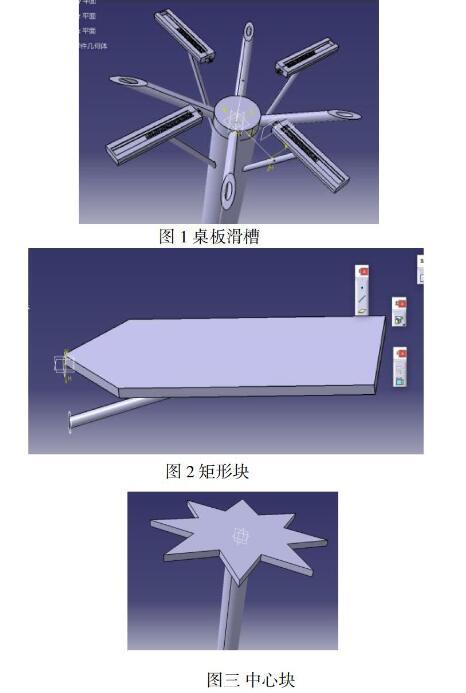
本文所設計的餐桌有大小兩種模式,選定的木板厚度為2cm,大桌模式是在小桌模式的基礎上實現的,這樣可以降低成本,提高利用率。在小桌模式下,四塊扇形板拼合組成一塊圓形桌板,四塊扇形板可以在各自的滑槽內進行移動,如圖1所示。在大桌模式下,由于要增大面積,小桌板的四個扇形塊沿著滑槽向拼合的反方向進行移動,原先小桌板所在的平面出現了類似于一個“十”字形的空隙,為了擴大面積,我們需要這種形狀的木板在小桌板所在的平面上與空隙完美貼合,從而增大桌板的面積。為了能組成這種形式的木板,又能在小桌模式下被隱藏起來,不妨礙用餐,我們將這種形式的木板分成兩個部分,在本文中分別稱為矩形塊和中心塊,如圖2,圖3。
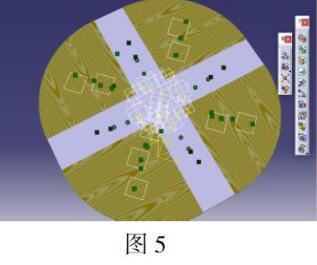
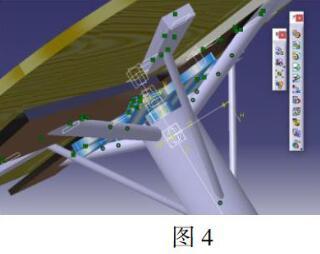
四個矩形塊和一個中心塊在小桌模式下均被隱藏在小桌板的下面,其中矩形塊在中間層,距離小桌板背面3cm,中心塊在最底下,與矩形塊的背面距離為0cm,如圖4所示。在小桌模式下,桌子的整體厚度為9cm,不會影響到用戶的就餐。在大桌模式下,四個扇形塊沿著滑槽向拼合的反方向進行移動,隨后中間層的矩形塊沿著有一定傾斜角度的滑道向上移動,最后最底層的中心塊沿滑道豎直向上移動。當全部移動結束后,桌板完美拼合,桌板的面積大大增加,如圖5所示。
三、傳動系統設計
(1)為了實現四個扇形塊能夠在滑槽內進行移動,同時考慮到桌子整體的經濟性問題,我們采用彈簧在壓縮狀態下將扇形塊彈開的方法,使其完成沿著滑槽向拼合的反方向移動的運動。對于扇形塊要完成沿著滑槽向拼合的方向移動,我們采用滑索一端與扇形塊相連,另一端通過滑槽上的孔以及滑槽一側的定滑輪與桌底中心立柱中的電機相連。通過電機的旋轉,拉動著扇形塊沿著滑槽向拼合的方向移動,移動到完美拼合的位置時,電機停止,并用可動插銷固定,避免彈簧彈開。四個扇形塊可由一個電機驅動,節約成本【3】。
(2)為了實現四個矩形塊能夠沿著傾斜滑道移動,我們采用絲桿螺母來實現運動。每個絲桿的頂端都有一個錐齒輪,而最底下有一個電機連接一個錐齒輪,電機帶動錐齒輪旋轉,錐齒輪與頂端的錐齒輪嚙合使旋轉運動傳遞到絲桿上,通過絲桿螺母從而實現了沿著傾斜滑道移動的運動,其上下移動只需控制電機的正轉反轉即可,驅動也由一個電機完成。
(3)為了實現中心塊能夠沿著滑道豎直上下移動,我們同樣采用絲桿螺母來實現運動,控制電機的正轉反轉和停止就可以實現中心塊與其他木板的貼合。
四、控制系統的設計
由前面所述,實現整個系統的運動需要四個電機來驅動,即扇形塊的驅動,矩形塊的驅動,活動插銷的驅動,中心塊的驅動。我們通過Arduino板編寫程序對電機控制板進行控制,實現各個電機按一定的順序正轉,反轉或停止。同時,Arduino板可以連接一個語音模塊或wifi模塊,給Arduino板一個輸入信號,來實現語音控制或手機APP控制。
五、結語
通過這次的設計,我意識到創新設計的靈感可能就在一瞬間產生,而這一瞬間的靈感并非憑空出現,而需要你認真的思考,認真的想,一直往你想要創新或設計的方面上想。與此同時,創新設計的過程中要不斷地優化自己的想法,使你的設計,創新更可靠,更經濟,更容易實現。生活中肯定還有很多的創新和設計需要被創造出來,只要我們一直想,一直思考,社會會越來越好。
參考文獻:
[1]程濤.現代室內設計與實務.廣東科技出版社.1997.
[2]高志,黃純穎.機械創新設計[M].北京:高等教育出版社,2010:56.
[3]謝陽里.現代機械設計方法[M].北京:機械工業出版社,2011:9.
作者簡介:
李潮,延邊大學工學院機械設計及其自動化專業,本科生.
通訊作者:崔承勛,延邊大學工學院機械工程系副教授,博士.
