基于耐久路等效損傷的某電動SUV載荷識別
2019-10-21 10:22:07黃倫路
汽車實用技術 2019年4期
黃倫路


摘 要:針對某款新開發SUV電動汽車,根據道路試驗規范規劃耐久試驗道路和里程分配,測量懸架軸頭和減振器等位置的加速度及位移信號。研究道路測試數據的平穩性和等效縮減,建立了該車的剛柔多體模型,結合虛擬迭代技術進行載荷識別,計算出該車在試驗場耐久道路上的輪心六分力。
關鍵詞:SUV;等效縮減;載荷識別;六分力
中圖分類號:U467? 文獻標識碼:B? 文章編號:1671-7988(2019)04-106-04
1 前言
耐久性是被考察對象在一定時間內能夠正常使用的能力[1]。電動汽車受到續航里程的要求需要進行輕量化設計,但仍必須保證其疲勞耐久性能。疲勞耐久試驗是驗證整車和零部件壽命的唯一手段,目前有實車用戶道路試驗、試驗場試驗和實驗室內測試三種途徑。汽車企業對新車型疲勞壽命評估的傳統方法都是利用實車在道路試車場進行路試,該方法是最直接且最準確的,但測試時間十分冗長且人力和經費耗費巨大,發現問題后難以改進設計。
用于疲勞壽命預測的Palmgren-Miner模型可以處理復雜的載荷,該模型討論了分析疲勞的方法,將其視為由載荷循環、不同的計數算法和載荷循環的路徑引起的。如何根據用戶使用里程或相應的試驗規范,制定測試策略,運用數據處理方法估計部件的載荷譜是車輛設計和虛擬疲勞分析的關鍵步驟之一。另外,成熟的多體系統動力學方法可以解決諸如車輛,機器人等載荷計算的問題[2]。因此,基于試驗場實測載荷信號進行輪心六分力估計逐漸在車輛部件載荷識別中得到應用。
本文中,載荷信號為廣義載荷,包括加速度,位移、力和應變,輪心六分力指輪心處的縱向力、側向力、垂向位移和輪心處的俯仰力矩、橫擺力矩、側傾力矩。
2 技術路線
系統動態載荷識別技術是根據已建立的多體動力學模型和實測的系統響應來反求作用在系統上的動態載荷,這是比系統動力學分析更為困難的第二類動力學逆問題[3]。該問題的困難在于動載荷在空間域具有分散性,在時域具有非平穩性,在頻域上具有寬帶性等,這使得待處理的問題在數學方程求解過程中往往是欠定的,病態的。
為確保疲勞設計的有效性并減少試驗次數、縮短開發周期,對騾車樣車進行載荷譜采集試驗,采集在襄陽試驗場共25種路面工況下的共計93個通道的載荷信號。通過對試驗場道路的實測載荷信號進行輪次分析,驗證了測試信號的時域平穩性。基于總偽損傷相等原理,提出將25種試驗路面等效縮減為9種典型路面,消除了求解矩陣方程的病態問題,最終得到輪心六分力的載荷歷程,其技術路線如圖1所示。
3 路譜采集
3.1 測點布置
測試車輛為新開發四輪前驅SUV,其滿載質量為2250kg,前懸為傳統麥弗遜型式,后懸為多連桿變異結構。安裝傳感器的類型和測點如表1所示,測點主要布置在車型承載系統的特征點上,相關傳感器參數如表2所示。
3.2 數據采集
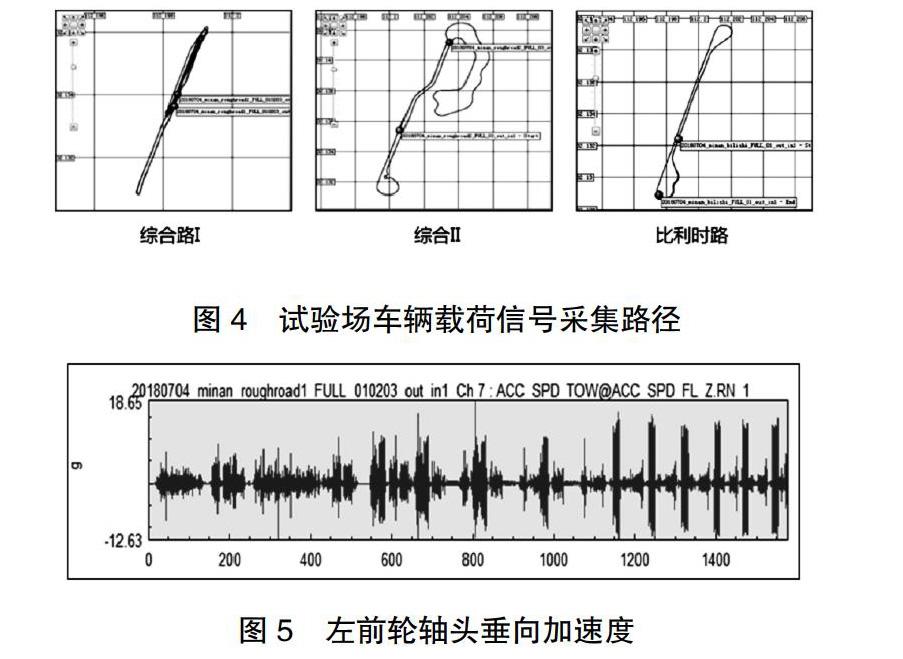
本文試驗道路選擇在襄陽東風汽車試驗場,該試驗場是將汽車正常行駛中遇到的不同使用條件和道路條件重現的試驗場地,但試驗道路經過了強化。耐久路分為高速跑道,強化壞路、山路、一般公路和越野路。本試驗所用到的道路為強化路,其濃縮了汽車日常行駛過程中對整車耐久性影響最大的路面,主要包括比利時路、綜合路I、制動路、綜合路II等,圖4展示了襄陽汽車試驗場3種道路的軌跡,其細分共有25種路況,限于篇幅,這里不一一列舉。
按照Q/MA T13170-2018[4],進行數據采集,其中圖4為本次試驗采集到的前輪軸頭垂向加速度信號,其加速度區間為[-12.63,18.65]g,其中g=9.8m/s2,為重力加速度。
4.3 車輛多體模型關聯
基于ADAMS/Car軟件建立了該SUV整車多體動力學模型,運用虛擬迭代方法求解4個輪心處的六分力。為保證車輛模型的精度和后期各部件連接點載荷的正確性,在前期車輛操穩性能開發的基礎上用MTS試驗臺測量了前、后懸架的K&C特性曲線。用測得的K&C特性對模型進行了關聯,標定結果如圖7所示,使得建立的載荷分解模型與實際車輛特性一致。
圖中表示的是車輪垂向力與車身側傾角之間的關系,即車輛側傾角剛度。其中實線為在K&C測試臺上測得的結果,為一封閉回線,反映了減振器作用下的阻尼遲滯效應,虛線為懸架多體模型仿真結果,是經過多次調整懸架襯套和緩沖塊行程后得到的側傾角剛度,此時模型仿真得到的角剛度曲線落在實測角剛度回線的中間,因此認為該模型是滿足工程精度的,可以用于部件的載荷分解。
模型關聯后,按照標定后的參數重新建立整車的載荷分解多體模型,定義了輪心六分力共24個激勵通道,按照實車測點位置定義38個輸出通道。
4.4 車輛部件載荷分解
利用虛擬迭代程序調用ADAMS車輛多體模型可以求得激勵點的載荷估計值[8]。本文運用該方法來求得輪心六分力,在多體模型的輪心處創建白噪聲小信號,表示車輪六分力隨機載荷。根據激勵和響應時域信號,通過Laplace變換,求得車輛多體模型的傳遞函數矩陣后,將縮減后各段典型路面的測量信號作為目標,通過將測量值與仿真值的差值乘以傳遞函數的廣義逆矩陣來求得每步迭代增量。需要強調的是,為消除傳遞函數廣義逆矩陣的病態性,要求輸出通道的數量必須大于輸入通道的數量[9]。
以共振路II為例,其屬于駕駛路面,故不考慮制動力矩。經過10輪迭代后,各通道相對損傷比接近1,滿足0.5~2范圍內的精度要求,如圖8所示。終止迭代過程,將此時輪心六分力作為整車模型的激勵載荷時間歷程,即完成了該SUV車道路載荷的識別,將此載荷作為多體模型的激勵,計算得到車輛各部件的載荷,用于強度和疲勞分析。
5 結論
本文提出用輪次分析法檢驗道路譜測量數據的各態歷經平穩性是車輛載荷識別的基礎。基于偽損傷線性疊加理論在測量數據分析的基礎上對25條道路等效縮減為9條典型道路,加快了載荷識別速度,解決了病態方程問題。對用于道路載荷識別的模型,運用模型關聯技術對懸架襯套,緩沖塊行程等進行了標定,使其與實車K&C測試結果吻合,得到滿足工程精度的整車多體模型。最后基于虛擬迭代程序調用車輛多體模型,將實測數據設定為響應目標,通過10次迭代識別得到輪心六分力的載荷歷程。
參考文獻
[1] P?r Johanesson,Michael Speckert.GUIDE TO LOAD ANALYSIS FOR DURABLITY IN VEHICLE ENGINEERING 2014.
[2] Michael Blundell,Damian Harty. Multibody Systems Approach to Vehicle Dynamics. New York,USA,2014.
[3] 張方,秦遠田.工程結構動載荷識別方法[M].北京:國防工業出版社,2011.
[4] Q/MA T13170-2018 汽車道路載荷譜采集方法.
[5] 王霄鋒,汽車可靠性工程基礎[M].北京:清華大學出版社,2007.
[6] 鄭松林,周亞捷,馮金枝等.一種新的考慮偽損傷保留的道路載荷模擬試驗加速方法[J].機械強度,2017,39(2):410-416.
[7] Yung Li Lee,Jwo Pan,R.B.Hathaway等 疲勞試驗測試分析理論與實踐[M].北京:國防工業出版社,2011.
[8] 邵建,董益亮,肖攀等.基于多體模型仿真的載荷譜虛擬迭代技術分析[J].重慶理工大學學報(自然科學), 010,24(12):84-87.
[9] 楊祥利,沈磊,袁劉凱等.虛擬迭代方法及其在駕駛室載荷分解中的應用[J].輕型汽車技術,2015,41(4):14-18.
