基于adams/view的重型越野車橫向穩(wěn)定桿設計
2019-10-21 10:22:07李志棟
汽車實用技術 2019年4期
李志棟
摘 要:針對某雙橫臂式獨立懸架K&C特性已初步確定的重型越野車,校核其側傾角剛度,并對該車前橋橫向穩(wěn)定桿進行設計計算。隨后利用adams/view對整車的操縱穩(wěn)定性進行仿真分析和實車試驗驗證。研究表明,試驗與仿真結果相一致,與設計要求相符,表明該橫向穩(wěn)定桿的設計合理。基于仿真方法進行整車操縱穩(wěn)定性分析對以后的設計有著重要的指導意義。
關鍵詞:重型越野車;橫向穩(wěn)定桿;Adams/view;操縱穩(wěn)定性
中圖分類號:U469.3? 文獻標識碼:B? 文章編號:1671-7988(2019)04-117-04
前言
在重型越野車懸架設計過程中,為保證成員的舒適性,前懸架的設計較“軟”,一般會引發(fā)垂直剛度和側傾角剛度減小等問題,進而導致車身轉彎時的側傾角Φr較正常情況下偏大;同時,為滿足整車載荷特性的實際需求,重型越野車的后橋剛度大于前橋,因此,后橋側傾角剛度和輪胎側偏角也均比前橋大,一定程度上增加了轉彎時整車過多轉向的可能。基于此,為減小車輛轉彎時的側傾角,有效實現(xiàn)轉彎時的不足轉向,在不改變懸架彈性元件的前提下,需要在前懸架中匹配合適的橫向穩(wěn)定桿。
本文所研究的重型越野車為8*8全驅,前后均為參數(shù)相同的雙橫臂式獨立懸架,懸架K&C特性已在前期計算中得到。
1 懸架側傾角剛度分析校核
一般地,當側向慣性力是整車重量的0.4倍時,要求乘用車的車身側傾角設計在2.5°~4°之間,而貨車則在6°~7°之間[1]。
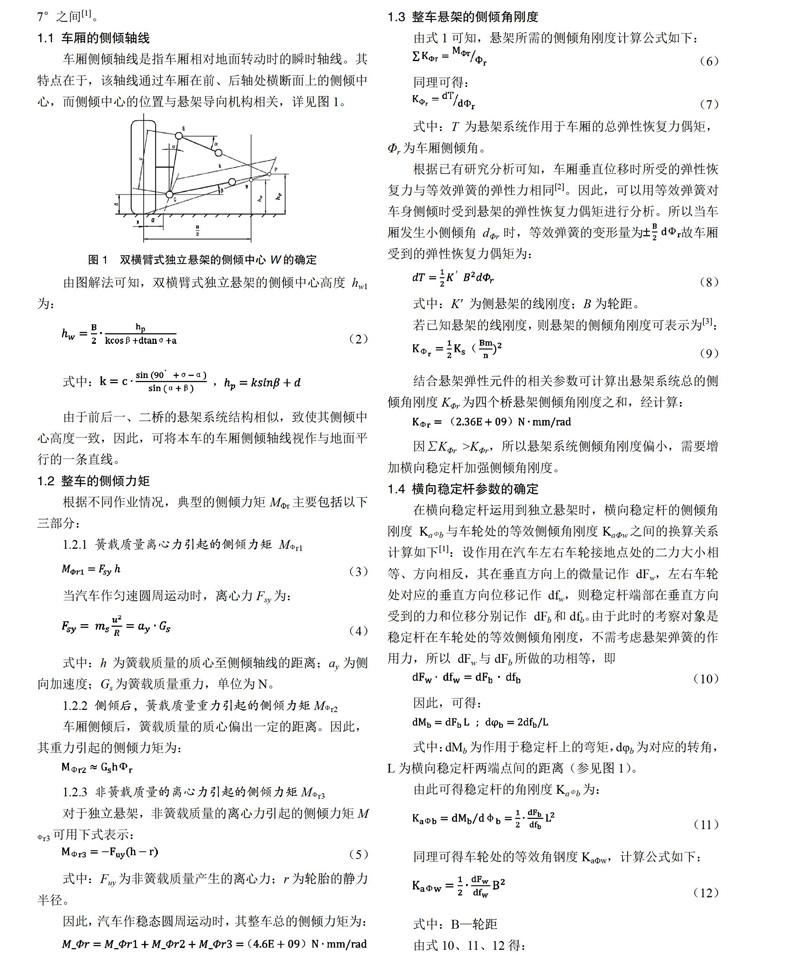
1.1 車廂的側傾軸線
車廂側傾軸線是指車廂相對地面轉動時的瞬時軸線。其特點在于,該軸線通過車廂在前、后軸處橫斷面上的側傾中心,而側傾中心的位置與懸架導向機構相關,詳見圖1。
2 操縱穩(wěn)定性試驗分析
2.1 穩(wěn)態(tài)轉向特性仿真分析
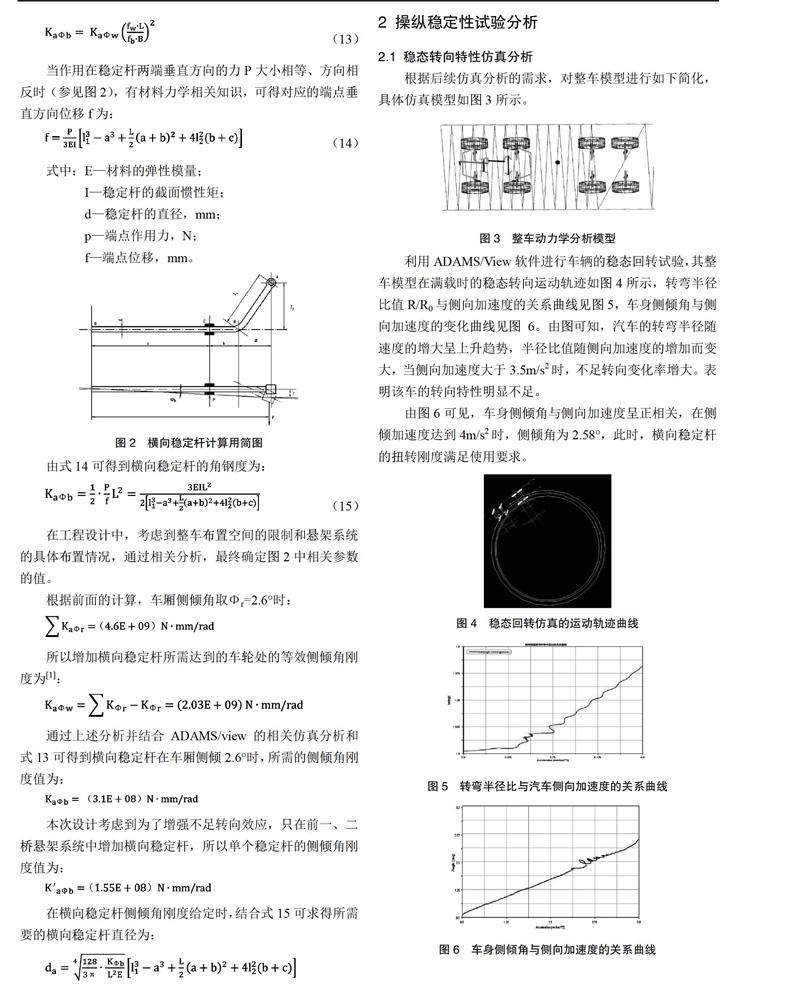
根據(jù)后續(xù)仿真分析的需求,對整車模型進行如下簡化,具體仿真模型如圖3所示。
利用ADAMS/View軟件進行車輛的穩(wěn)態(tài)回轉試驗,其整車模型在滿載時的穩(wěn)態(tài)轉向運動軌跡如圖4所示,轉彎半徑比值R/R0與側向加速度的關系曲線見圖5,車身側傾角與側向加速度的變化曲線見圖6。由圖可知,汽車的轉彎半徑隨速度的增大呈上升趨勢,半徑比值隨側向加速度的增加而變大,當側向加速度大于3.5m/s2時,不足轉向變化率增大。表明該車的轉向特性明顯不足。
由圖6可見,車身側傾角與側向加速度呈正相關,在側傾加速度達到4m/s2時,側傾角為2.58°,此時,橫向穩(wěn)定桿的扭轉剛度滿足使用要求。
2.2 穩(wěn)態(tài)轉向特性實車試驗
根據(jù)前面匹配計算的結果,在整車前懸架加裝橫向穩(wěn)定桿,并根據(jù)國標GB/T 6323-2014《汽車操縱穩(wěn)定性試驗方法》和QC/T 480-1999《汽車操縱穩(wěn)定性指標限值與評價方法》,在某汽車試驗場進行了穩(wěn)態(tài)轉向試驗,實驗結果如表1所示:
由表中數(shù)據(jù)可以看出整車的不足轉向度為正,表明車輛的轉向特性不足,車身的側傾角度小于2.6°,滿足設計要求。
3 結論
在重型越野車懸架特性已確定的情況下,對懸架側傾角剛度進行分析校核,依據(jù)校核結果對前兩橋橫向穩(wěn)定桿進行匹配計算,在adams/view中建立整車動力學分析模型,對穩(wěn)態(tài)轉向特性進行仿真分析,并進行了實車試驗。實車試驗數(shù)據(jù)滿足設計要求并且與仿真結果基本一致,表明橫向穩(wěn)定桿的設計匹配合理,整車操縱穩(wěn)定性仿真的方法能為以后的設計工作提供借鑒。
參考文獻
[1] 王望予等,汽車設計(第4版)[M],機械工業(yè)出版社,2017.10.
[2] 劉惟信等,汽車設計[M],清華大學出版社,2000.10.
[3] 余志生等,汽車理論(第5版)[M],機械工業(yè)出版社,2017.10.
[4] GB/T6323,汽車操縱穩(wěn)定性試驗方法[S],2014.
[5] QC/T 480,汽車操縱穩(wěn)定性指標限值與評價方法[S],1999.
