基于角點PRM的移動機器人路徑規劃
2019-10-25 00:57:10王志明
長春工業大學學報 2019年4期
關鍵詞:檢測
宋 宇, 王志明
(長春工業大學 計算機科學與工程學院, 吉林 長春 130012)
0 引 言
隨著自動機器人技術的發展,近年來路徑規劃算法得到越來越多的國內外學者關注,路徑規劃的相關算法層出不窮,從蟻群算法、A*算法[1]、D*算法、RRT算法、PRM算法、人工勢場法到模糊邏輯算法、神經網絡算、強化學習算法,其中PRM算法由于相對于A*算法用時較少得到廣泛應用,但由于傳統PRM算法存在窄通道連通率低的缺陷。基于高斯采樣[2]的PRM算法增加了窄通道連通率,但由于高斯采樣得到的點大多數集中在障礙物邊緣線上,而障礙物邊界點大多并不是產生最終路徑所經過的點,導致后續點與點之間的連通性檢測花費時間成倍增加。基于橋測試采樣[3]的PRM算法增加了路徑連通率,但由于橋測試采樣產生的是由兩個在障礙物中的點的中點位置得到的,導致基于橋測試采樣的PRM算法只適用于通道寬度變化不大的情形。文獻[5]提出了利用人工勢場力將落在障礙物中的點移動到自由空間的方法,提高了采樣點的利用率。由于真正對最終路徑起決定性作用的點是障礙物的角點,故文中提出了一種結合角點檢測的PRM算法。仿真結果表明,改進算法在窄通道場景與普通場景下,消耗時間與路徑長度都得到了較好的結果。
1 Harris角點檢測算法
文中所采用的Harris角點檢測算法步驟如下:
1)計算圖像的水平、豎直灰度值變化量矩陣Ix,Iy。文中采用了高斯函數求微分,即用Fx矩陣與Fy矩陣分別與原圖像的像素矩陣作卷積得到Ix與Iy。
(1)
(2)

(3)
3)計算圖像中所有像素的R值
R(x,y)=detM(x,y)-
k*(traceM(x,y))2。
(4)
4)對于上述得到的R矩陣,分別判斷每個像素的R值是否同時大于這個像素的8個鄰居像素的R值,若都大于,則此像素所在的位置為角點。
2 改進PRM算法
2.1 采樣點的選擇
1)首先采用Harris角點檢測算法檢測到圖像中所有角點,然后從檢測到的所有角點中排除距離過近的角點。即為了排除1個實際角點附近產生了許多輸出角點的情況,文中在使用Harris角點檢測算法的過程中,對新選擇的角點加了距離限制條件,若新產生的角點與之前產生的所有角點的最小距離小于給定閾值k(文中取k=10),則此新角點不計入最終角點內。
2)為了增加角點之間的連通性,在Harris產生出n個角點后,以每個角點為中心,上下左右各產生距離每個角點d(文中取d=10)的4個臨近點,即若第一步產生的角點數量為n,此時額外產生4n個點,然后從這4n個點中保留不在障礙物中的點作為最終輸出點。
2.2 Cardinal 樣條曲線路徑平滑
樣條曲線是通過在給定點之間內插點的方式實現的,文中采用的是Cardinal 樣條曲線。單段Cardinal 樣條曲線是由4個給定點確定的,如圖1所示。
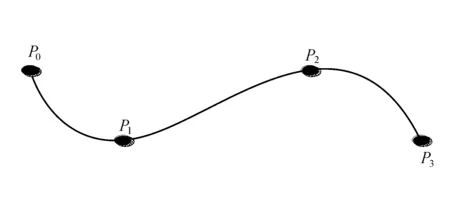
圖1 Cardinal 樣條曲線
圖中:P0,P1,P2,P3為給定的4個點,u為一個從0增加到1的參數,u從0取到1對應得到P1到P2之間的所有內插點,點P1與P2之間的內插點是由下式得到的:
(5)
(6)
其中,s=1-t/2,t為tension系數。由于每段Cardinal樣條曲線在分段點處一階導數連續,故給定n個控制點,可得到一條由n-3段Cardinal樣條組合成的一條光滑曲線。
3 仿 真
3.1 路徑長度與消耗時間對比
使用Matlab 2014a在cpu為i3-2120,3 G內存,32位Windows7的電腦上進行了仿真,給定500×500像素的地圖下改進算法與傳統PRM算法、高斯采樣PRM、橋測試采樣PRM的路徑圖,起點坐標為[10,10],終點坐標為[490,490],由于文中改進算法加入了角點檢測過程,故不需要額外設置參數,傳統PRM算法、高斯采樣PRM、橋測試采樣PRM的采樣點數設置為固定值100,橋測試采樣中的其他參數經反復測試設置為較優參數。不同地圖算法路徑對比如圖2所示。
(a) 地圖1

(b) 地圖2
(c) 地圖3

(d) 地圖4圖2 不同地圖算法路徑對比
從圖2可以看出,由于改進算法采用的是角點,而橋測試算法得到的點大多為通道的中點,高斯采樣得到的多數點為障礙物邊界,故改進算法得到的路徑長度最短。
各算法在路徑長度和運行時間方面的結果對比見表1。
由表1可以看出,當給定地圖總的角點數量不多時(如地圖4),改進算法產生的最終點個數較少,導致后續用于點與點之間的連通性檢測的時間(相比于其他3種算法給定100個點)有所減少。同時由于改進算法產生的4n個點中,每4個點相對距離較近,用于這些點之間連通性檢測的時間也相對較少,故改進算法雖然加入了角點檢測的過程,但算法效率反而較高。
算法在每種地圖下100次實驗路徑連通性對比見表2。

表2 100次實驗算法連通次數表
3.2 Cardinal 樣條曲線路徑平滑
以起點、終點以及A*算法得到的所有路徑點為Cardinal 樣條曲線中的控制點,文中tension系數設置為0.8,經Cardinal 樣條平滑后得到路徑如圖3所示。
(a) 地圖5
(b) 地圖6圖3 Cardinal 樣條曲線平滑效果圖
4 結 語
由于傳統PRM算法在產生采樣點時使用的是均勻采樣,導致了窄通道連通率不高的現象出現,文中采用了結合角點檢測算法采樣的PRM算法,最后采用Cardinal 樣條曲線平滑路徑。仿真結果顯示,由于改進算法產生的采樣點相對少而有效,故改進算法得到的路徑可行、有效。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12