基于船舶操縱模擬的船撞橋概率研究*
2019-11-06 09:58:22孔憲衛張慶河
中國安全生產科學技術 2019年10期
孔憲衛,張慶河
(1.天津大學 建筑工程學院,天津 300072;2.交通運輸部天津水運工程科學研究所 港口水工建筑技術國家工程實驗室,天津 300456)
0 引言
船撞橋事故一直伴隨著橋梁工程的發展,據資料統計,1960—2008年國外發生船舶撞擊橋梁倒塌的事故率約為0.73起/a,中國嚴重的橋梁船撞事故自1978—2008年發生了21起,年平均事故率約1起[1],例如2007年6月,“南桂機035”船撞擊九江大橋[2]橋墩致使橋梁倒塌,4輛汽車落水,9人死亡,造成了巨大的社會影響。鑒于船撞橋事件的巨大危害,越來越多的學者投入了船撞橋概率的研究。
船撞橋概率的研究最早也是基于船船碰撞概率研究[3]。Macduff[4]在評估船舶交通事故時,以船一船相碰的統計結果為基礎,計算出了船舶相互碰撞的理論概率[3],為后續船橋碰撞的研究打下了基礎;美國AASHTO(《美國公路橋梁設計規范》)[5]基于船舶數量和船舶偏航概率及碰撞幾何概率提出了碰撞概率計算方法,因該方法完善相對簡單實用性強成為1種常用的研究方法,但該方法缺乏風、流及操船者因素在碰撞過程中的影響;歐洲規范[6]模型提出了基于失效路徑的積分算法,但該方法目前還只是理論上的表述,相關參數無法確定而無法應用于實際工程計算;Kunz[7]以船舶撞橋事故發生前船舶與橋墩的相互位置為基礎,建立了1個具有2隨機參數的船橋碰撞概率計算模型,該模型可以計算出船撞橋概率,根據船舶的年交通量可計算出年碰撞次數,但對自然條件參數影響分析也不夠全面;郝勇等[8]以2007年武漢海事局轄區船舶碰撞資料為基礎,利用故障樹分析方法構建該水域船舶碰撞故障樹,進行定性、定量分析,得到包括航行疏于戒備、車舵控制失誤、疏于瞭望等14個主要危險因素及各因素的相關事故數;波蘭學者Gucma[9]綜述了船橋碰撞的研究,提出可以利用船舶操縱模擬器模擬實驗進行船橋碰撞風險研究;周立等[10]推導了風和流對船舶的作用公式,并根據風流作用公式對AASHTO模型中的幾何概率參數進行了修改;江建華等[11]將綜合安全評估(FSA)的原理和步驟應用到船舶海上應急管理的評價方面,依據FSA的流程,通過咨詢、系統分析和向專家發調查表等方法以及不斷地修改完善,構建了船舶海上應急管理評價的指標體系,運用德爾菲法(Delphi)和層次分析法(AHP)確定了各指標的權重,用模糊綜合評價方法建立評價數學模型,并依據評價結果,給出了提高和改善船舶整體應急能力的建議;Huang等[12]針對狹窄限制性水域船撞橋事故風險進行了識別,建立了1套船橋動態風險預警系統;鐘軍等[13]利用頭腦風暴法對影響船舶通過橋區水域安全的因素進行辨識,構建了包含10個Ⅰ級指標的指標體系,采用AHP法和熵權法分別從主、客觀的角度計算各指標的權重,并依據最小鑒別原理進行權重組合,得到兼顧主、客觀因素的權重。將各項評價指標劃分為低危險度、較低危險度、中等危險度、較高危險度和高危險度5個安全等級,結合組合權重構建船橋碰撞風險模糊物元評價模型。
從前人研究可以看出,原始ASSHITO模型是常用的模型,但其幾何概率是以航道中心位置為均值,以船長為方差的理想化正態分布,未考慮風、流等因素作用下的船舶操縱及應急操縱停船在撞橋過程中的影響。本文在AASHTO模型基礎上,基于船舶操縱數學模型,考慮了風和水流等不同環境因素,修正了幾何概率的計算方法,并引入了停船概率模型,從而對AASHTO模型進行了修正,將修正后的AASHTO應用到北江油金大橋的船撞橋概率研究中。
1 研究方法
1.1 AASHTO模型簡介
AASHTO[5]模型船撞橋概率模型見式(1):
P=N×PA×PG
(1)
式中:P為船橋發生碰撞的概率;N為根據船舶類型、大小和裝載情況分類的船舶年度數量;PA為船舶的偏航概率;PG為碰撞的幾何概率[14]。
PA偏航概率是指通過橋梁的船舶,由于某些不確定因素,最終導致其偏離正常的航行路線。偏航概率可取為:
PA=BR×RB×RC×RXC×RD
(2)
式中:BR為偏航基準概率;RB為船位修正系數,RC為與船舶航線平行作用的修正系數;RXC為垂直于船舶航行作用的橫向水流的修正系數;RD為船舶交通密度修正系數。
PG幾何概率是指船舶在靠近橋梁處船位的概率,根據AASHTO模型,計算幾何概率采用的航跡分布為正態分布[14],幾何概率示意如圖1所示。

圖1 幾何概率示意Fig.1 Schematic diagram of AASHTO model
AASHTO模型計算碰撞概率的步驟為:首先確定偏航概率,即船舶從A區進入B區的概率;然后再乘以船舶幾何概率,即船舶駛入B區發生事故的概率,示意如圖2所示。
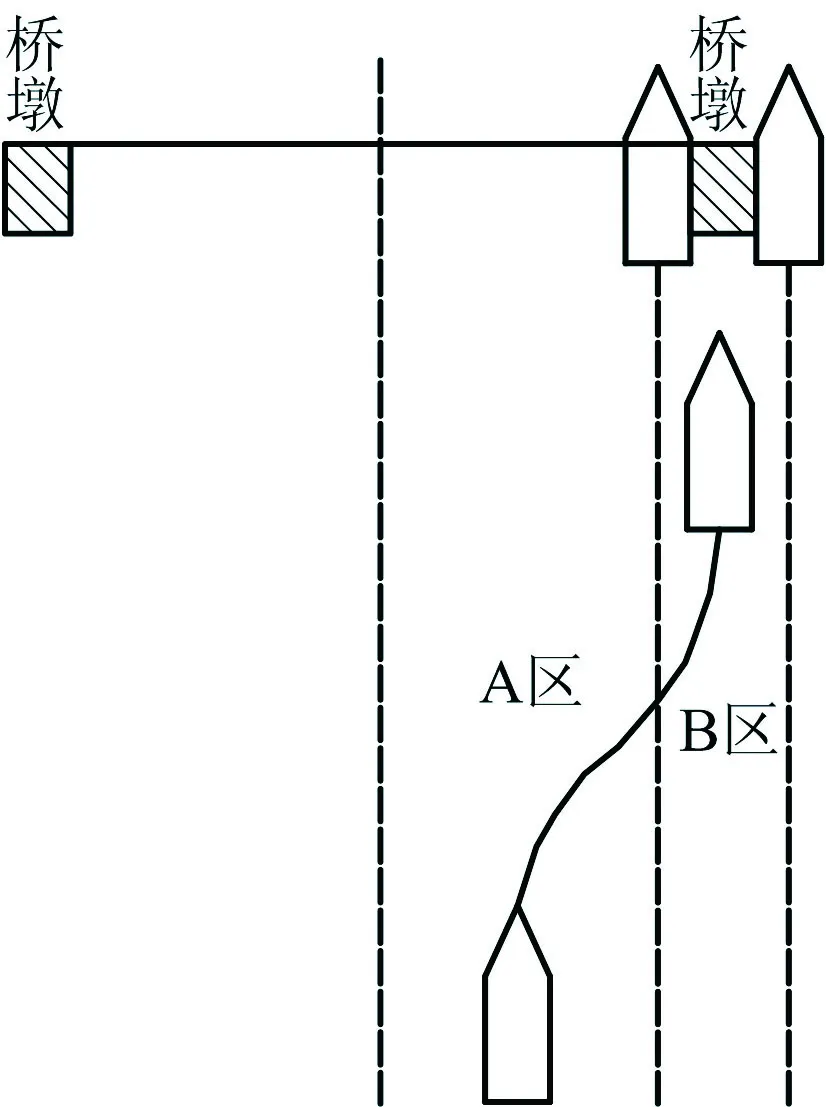
圖2 AASHTO模型計算示意Fig.2 Schematic diagram of AASHTO model
確定概率的方法是進行長期的航跡帶觀測和事故統計,在此基礎上給出相關計算參數,但對一些還未建的處在建設咨詢階段的橋梁這些參數無法給出。并且船舶在航行中一旦駛入危險區域,操船人員會采取一些措施如減速、調整航向等來避免碰撞,也即船舶從圖中的A區偏航駛入B區后,并不一定就撞上橋墩。從這個意義上說,AASHTO模型也需要改進。
1.2 AASHTO模型的改進
針對AASHTO模型的不足之處進行以下2點改進:
1)對幾何概率分布曲線的改進
AASHTO模型在計算幾何概率PG時,其航跡分布曲線是以航道中心線為正態分布中心,船舶長度作為標準差的理想化分布,而忽略了風、流、人為因素等的影響。本文通過建立船舶數學模型,加入了風、流、地形及人為操船的影響,得到船舶航跡帶分布,如圖3所示。從圖3可以看出,在風、流及人為因素等影響下,航跡帶正態分布中心并不位于航道中心線上,因此,各個橋墩船撞幾何概率相差較大(圖中陰影部分為橋墩船撞區域)。
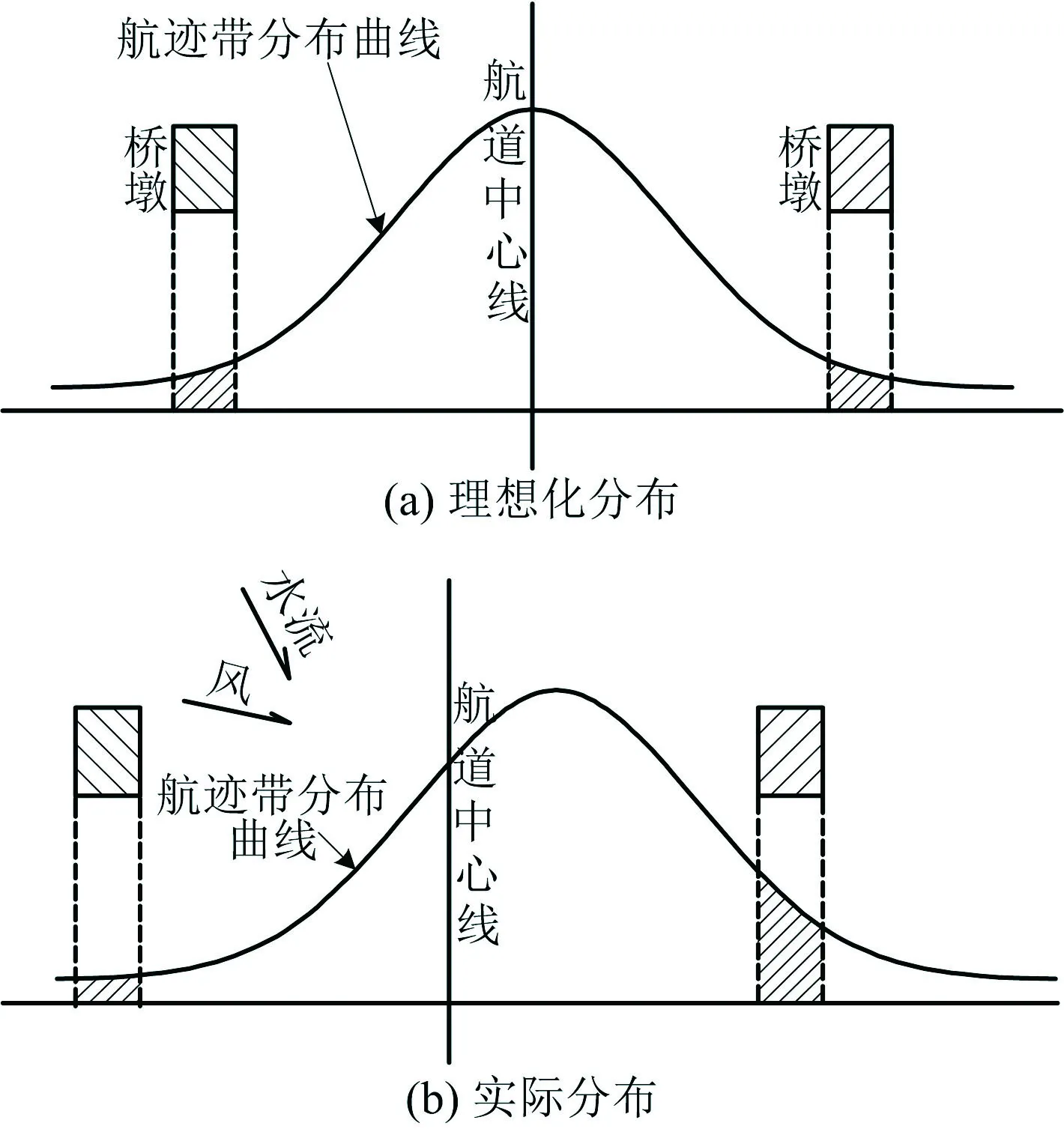
圖3 航跡帶分布對比Fig.3 Contrast of trajectories distribution
2)引入停船概率函數
如果船舶發生偏航駛入橋區水域,若船舶能在碰到橋墩之前停住則不會發生碰撞事故,若船舶在碰到橋墩前不能停下則發生碰撞事件。因此,在此引入停船概率函數FS,其形式為:
PS=1-FS
(3)

(4)
(5)
式中:PS為未能停船的概率;FS為停船概率;f(s)為停船距離分布函數,表達形式根據Kunz[7]的建議,均值μs和方差σs的取值可通過船舶數學模型計算得出的航跡分布曲線得到。
因此,AASHTO模型中船橋發生碰撞的概率計算公式可表示為:
P=N×PA×PG×PS
(6)
式中:P為碰撞概率;N為船舶艘次;PA為船舶的偏航概率;PG為碰撞的幾何概率;PS為未能停船的概率。
2 船舶操縱運動數學模型的建立及驗證
2.1 船舶操縱運動數學模型
橋區水域船舶操縱運動方程為:
(7)
式中:m指船舶質量,t;mx,my分別為船體的附連質量,t;Iz為慣性矩,t·m2;Jz為船體附連慣性矩,t·m2;u,v分別為船長、船寬方向的速度,m/s;r為船舶的轉頭速度,1/s;X,Y分別為槳、舵及各種環境外力下的力,kn;N為力矩,kn·m;下標WD,WV,C分別表示風、波浪和水流;下標P和R分別表示螺旋槳和舵;XH,YH,NH為不包括慣性力在內的船體水動力[15]。
2.2 船型率定標準
本文選擇1 000 t散貨船及1 000 t集裝箱船進行船舶操縱性的率定。船型率定的依據為IMO于1993年頒布的《船舶操縱性臨時標準》[16],標準對于船舶的旋回性能、初始旋回性能、保向性能和停船性能提出了相應的要求,具體如下:
1)旋回性能
在進行旋回操縱中,旋回圈進距不應大于4.5倍船長。
2)初始旋回性能
在向左/右操10°舵角,在船首向自初始航向改變10°的時間內船舶前進的距離不應大于2.5倍船長。
3)保向性能
①在10°/10°Z型試驗中第1超越角的值不應超過:
a.10°,如果L/V<10s;
b.20°,如果L/V≥30s;
c.〔5+1/2(L/V)〕°,如果30>L/V≥10s。
②10°/10°Z型試驗中第2個超越角的值不應大于第1超越角上述臨界值的15°。
③20°/20°Z型試驗中的第1超越角不應大于25°。
2.3 船型率定試驗
1)旋回性能試驗
1 000 t散貨船船型左旋回圈、右旋回圈進距為3.65和3.72 L;1 000 t集裝箱船型左旋回圈、右旋回圈進距為3.8和3.91 L;1 000 t散貨船船型左旋回、右旋回轉彎半徑為4.04和4.12 L;1 000 t集裝箱船型左旋回、右旋回轉彎半徑為4.03和4.16 L。代表船型的旋回操縱特性滿足IMO船舶操縱性臨時標準的要求
2)初始旋回性能試驗
10°舵角旋回試驗中,首相角改變10°,1 000 t散貨船的縱距為1.65 L;1 000 t集裝箱船的縱距為1.50 L,小于IMO規定的2.5 L。代表船型的旋回操縱特性滿足IMO船舶操縱性臨時標準的要求。
3)航向保持能力試驗
10°/10°Z形試驗時,1 000 t散貨船第1超越角為3.3°,第2超越角為4.2°;1 000 t集裝箱船第1超越角為3.2°,第2超越角為4.1°,滿足IMO船舶操縱性臨時標準的要求;20°/20°Z形試驗時,1 000 t散貨船第1超越角為9.1°,第2超越角為9.9°;20 000DWT雜散貨船第1超越角為7.3°,第2超越角為8.2°,滿足IMO船舶操縱性臨時標準的要求。
經過上述率定試驗分析可知:所建船舶模型的有關性能參數符合IMO船舶操縱性標準。
3 模型的應用
北江油金大橋位于鄧塘洲下游約500 m,橋址所在位置為彎曲河段,橋區河勢如圖4所示,橋區通航方式如圖5所示,位于上行航道通航孔的橋墩是14#和15#橋墩,位于下行航道通航孔的橋墩是15#和16#橋墩。

圖4 油金大橋河勢示意Fig.4 Youjin bridge river situation

圖5 油金大橋通航示意Fig.5 Youjin bridge navigation situation chart
1)船舶操縱模擬實驗
利用建立的船舶操縱數學模型,模擬了1 000 t內河散貨船及1 000 t港澳集裝箱船、上行下行2種航行方式、6種流場條件及2種風況下的船舶操縱試驗,共48組模擬試驗。試驗工況匯總見表1。
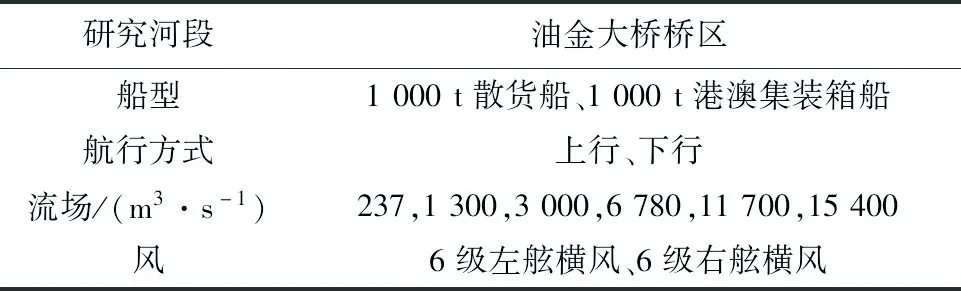
表1 試驗工況匯總Table 1 Vest conditions
隨著流量的不斷增加,船舶航行越來越困難,航跡也越來越寬,根據數值模擬的15 400 m3/s下1 000散貨船航跡如圖6所示,以船舶在航道正中心作為0,統計不同工況下船舶偏離航道正中心距離的航跡帶分布情況見圖7~10。由圖7~10可以看出,航跡帶分布基本符合正態分布,在不同風、流及操船因素等影響下,航跡帶中心并不位于航道中心線上。經模擬試驗樣本結果計算,1 000 t散貨船上行航跡帶分布期望值為-1.194,均方差為6.983,下行航跡帶分布期望值為2.82,均方差為7.90;1 000 t集裝箱船上行航跡帶分布期望值為2.208,均方差為6.83,下行航跡帶分布期望值為4.169,均方差為8.250。

圖6 15 400 m3/s 10 000散貨船航跡圖6 Upgoing ship track in 15 400 m3/s (1 000 t bulk ship)

圖7 上行船舶航跡帶分布(1 000 t散貨船)Fig.7 Upgoing ship track distribution(1 000 t bulk ship)

圖8 下行船舶航跡帶分布(1 000 t散貨船)Fig.8 Downgoing ship track distribution(1 000 t bulk ship)

圖9 上行船舶航跡帶分布(1 000 t集裝箱船)Fig.9 Upgoing ship track distribution(1 000 t container ship)

圖10 下行船舶航跡帶分布(1 000 t集裝箱船)Fig.10 Downgoing ship track distribution (1 000 t container)
2)偏航概率計算
平行于航線的水流分量為2.5 m/s,垂直于航線的水流分量為0.15 m/s,船舶交通密度屬于中等。結合船舶操縱模擬實驗,根據改進的AASHTO規范計算模型,各參數取值見表2。
帶入式(2)計算船舶偏航概率為:

PA=BR×RB×RC×RXC×RD=1.105×10-4
3)幾何概率計算
①1 000 t散貨船
上行船舶考慮撞擊14#,15#橋墩,下行船舶考慮撞擊15#,16#橋墩,根據AASHTO規范,幾何碰撞概率為:
船舶上行:
式中:x1指橋墩左側坐標;x2指橋墩右側坐標,以航道中心線作為坐標0值,下同。

②1 000 t集裝箱船:
幾何碰撞概率:


各橋墩受船舶碰撞幾何概率及對應積分上下限取值見表3。
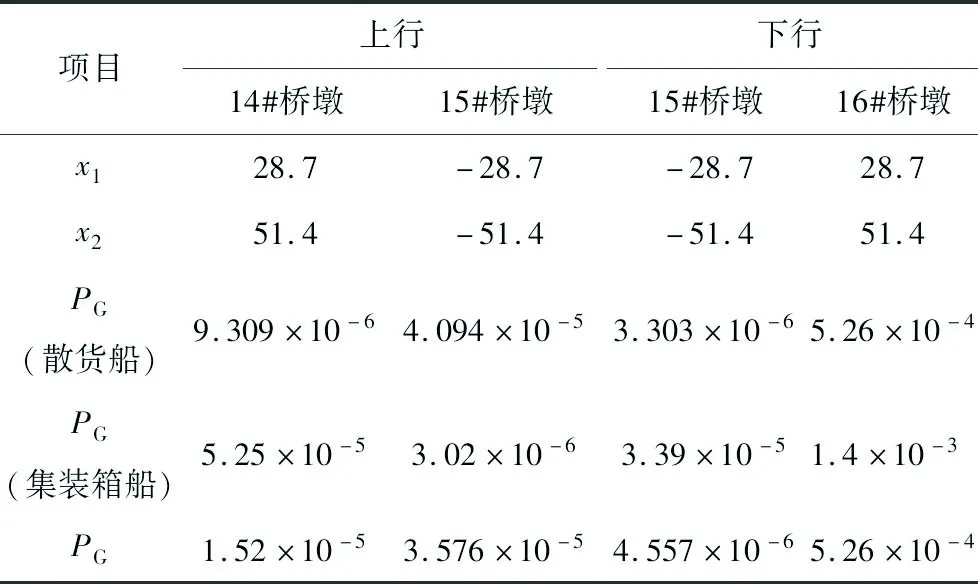
表3 幾何概率及x1,x2取值Table 3 Geometric probability parameter
4)船未停下的概率
根據船舶模擬器試驗結果,船舶下行停船距離300 m,均方差45 m;船舶上行停船距離200 m,均方差45 m,停船距離積分路徑D取350 m。則船未停下的概率為:
船舶上行:
船舶下行:
5)各橋墩碰撞概率計算
北江流域礦產資源豐富,預測2020年貨運量2 660萬t,油金大橋船舶年通航量將超過53 200艘次,其中散貨船和集裝箱船艘次各占一半,則各橋墩遭到船舶碰撞的概率分別為:
船舶上行:
P14=20 200×1.105×10-4×1.52×10-5×0.024 7=8.38×10-7
P15=20 200×1.105×10-4×3.576×10-5×0.024 7=1.972×10-6
船舶下行:
P15=33 000×1.19×10-4×4.557×10-6×0.154 3=2.761×10-6
P16=33 000×1.19×10-4×0.000 562×0.154 3=3.405×10-4
綜上,油金大橋整體受上行船舶碰撞年頻率大約為2.81×10-6次/a,受下行船舶碰撞年頻率3.43×10-4次/a,總碰撞頻率3.461×10-4次/a。
4 結論
1)建立的船舶操縱數學模型符合《船舶操縱性臨時標準》的要求,可以用于船舶操縱的模擬。
2)原始的ASSHITO模型幾何概率是以航道中心位置為均值,以船長為方差的理想化正態分布。本文基于船舶操縱數學模型,綜合考慮了風、流、航道彎曲及船舶操縱等因素的影響,提出了以船舶航跡帶中心位置為均值,以模擬實驗計算的樣本計算結果為方差的幾何概率模型,并引入了停船概率的概念。
3)根據建立的模型,預測2020年油金大橋受上行船舶碰撞年頻率大約為2.81×10-6次/a,受下行船舶碰撞年頻率3.43×10-4次/a,總碰撞頻率3.461×10-4次/a。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03