時頻域分解海面回波及慢速微弱目標檢測
2019-11-08 08:29:36產秀秀祿曉飛
西安電子科技大學學報 2019年5期
左 磊,產秀秀,祿曉飛,李 明
(1.西安電子科技大學 雷達信號處理國家重點實驗室,陜西 西安,710071;2.中國酒泉衛星發射中心 甘肅 酒泉,735000)
海面后向散射電磁波產生海雜波,其特性與海面粗糙程度以及發射信號的極化、帶寬和波長等因素有關,表現為強的非平穩性[1-3]。遠距離探測時,入射角很小,發射信號與海面波浪產生類似于鏡面反射效應,海雜波能量急劇增大,頻譜擴展嚴重[4]。
由于海雜波的復雜性及慢速微弱目標的多普勒頻率非常靠近海雜波,傳統的基于動目標檢測的方法效果不佳。分形特征能夠較好地描述海面回波的形狀特征,可以用來檢測海面慢速微弱目標,但需要很長時間積累,不具有實時性[5]。文獻[6-7]應用海雜波白化抑制和正隨機過程建模后,再利用特征檢測實現海面飄浮小目標檢測。將海面慢速微弱目標在一定時間內建模成微動模型,利用時頻分析等微多普勒分析工具進行海面慢速微弱目標檢測的方法吸引了大量學者的注意[8-10]。時頻分析可以顯示目標的瞬時運動特性,是檢測海面慢速微弱目標的有力工具,其中時頻分解方法在抑制海雜波及目標檢測中表現出明顯的優勢。文獻[11]利用平穩小波變換進行海面回波信號分解后,再利用固有熵特征進行目標檢測。文獻[12]提出了利用極化特征分解的方法進行海面目標檢測的方法。文獻[13]基于逆維格納威爾分布(Wigner-Ville Distribution, WVD)提出了基于S方法(S-Method, SM)的信號分解方法,并應用該方法檢測海面目標。S方法的信號分解方法在將海雜波分解成多個信號分量的同時,容易將兩目標信號分裂成若干部分,出現漏警或虛警。
根據遮隔維格納威爾分布(Masked WVD, MWVD)和逆維格納威爾分布,筆者提出了基于時頻迭代分解的海面慢速微弱目標檢測方法。對比S方法的信號分解方法,迭代分解方法在分解海面回波時,通常將海雜波分解成一個或兩個信號分量。并且目標信號分量不會分裂,因而虛警率較低。迭代分解方法對于在時頻域非常接近且能量相差較大的兩調頻信號分量具有較強的分辨能力,可以從海面回波中分解出海面慢速運動目標的回波信號。
1 海面慢速微弱目標檢測方法
基于信號的逆維格納威爾分布和遮隔維格納威爾分布,筆者提出了一種基于時頻迭代分解的海面目標檢測方法。該方法能夠將海雜波分解成一個或兩個信號分量,因此能夠較快地分解出目標信號分量。下面首先簡要回顧一下逆維格納威爾分布變換,再提出兩個目標信號與海雜波之間的判別準則,最后提出目標檢測方法。
1.1 逆維格納威爾分布變換
信號f(n)的維格納威爾分布變換的離散形式可以表示為
(1)
此處省略了常數因子2,其中,Wf(n,k)表示信號f(n)在離散時間為n、離散頻率為k時的維格納威爾分布,N為信號長度,f*(n)是f(n)的共軛。信號的維格納威爾分布可以看作對二維函數f(n+m)f*(n-m)進行一維離散傅里葉變換。其逆離散傅里葉變換可表示為
(2)
其中,n1=n+m,n2=n-m。式(2)的矩陣形式可以表示為
R=f(n)f*(n) ,
(3)
其中,f(n)為信號f(n)的列向量形式,自相關矩陣R通過對式(2)的插值得到。對方陣R進行特征分解可以發現,僅有一個非0特征向值λ1=Ef(Ef為信號能量)。根據λ1及其對應的特征向量u1(n)構造信號:
(4)

1.2 目標信號與海雜波之間的判別特征
如果從海面回波信號中利用逆維格納威爾分布提取出一個信號,如何判定該信號是目標信號還是海雜波是一個非常棘手的工作,筆者擬利用下面兩個特征進行目標信號判別。
準則1信號維格納威爾分布的能量聚集。文獻[13]指出,在時頻域目標信號的能量比海雜波集中。因此,文中將信號分量維格納威爾分布的最大值的平方與其和之比作為目標信號判定準則。由于式(4)中u1(n)的能量為1,且其維格納威爾分布與原信號的維格納威爾分布只相差一個能量因子,所以能量聚集性Crit的表達式可簡化為
(5)
根據準則1進行如下判斷:
(6)
其中,P0是目標檢測門限。
準則2用來區分目標信號和海尖峰,可通過下式進行判斷:
(7)
其中,T0是目標檢測門限,Trit是信號分量的持續時間。
1.3 海面慢速微弱目標檢測方法
假設海面回波信號中包含海雜波、目標信號和其他干擾等,則可以用一個長度為N的多分量信號表示為
(8)
其中,i表示多分量信號f(n)的第i個分量(i=1,2,…,M)。且當信號分量序號i
多分量信號的維格納威爾分布包含各分量的自項和分量之間的交叉項。遮隔維格納威爾分布是一種保留信號維格納威爾分布中各分量自項并抑制交叉項的方法[14],基于逆維格納威爾分布和定義的兩個準則,文中提出基于時頻迭代分解的海面慢速微弱目標檢測方法。
步驟1計算信號f(n)的遮隔維格納威爾分布。計算海面回波信號f(n)的2N點短時傅里葉變換(STFT),經頻譜折疊得到位于歸一化頻率-0.25~0.25范圍內的數據,記為C(n,k)。使用硬門限對其進行時頻域濾波,得
(9)
m=aE(|C(n,k)|) ,
(10)
其中,E(|C(n,k)|)為|C(n,k)|的整體均值,a為修正系數。將CM(n,k)與海面回波信號的維格納威爾分布相乘得到遮隔維格納威爾分布。

步驟3根據準則1和準則2判斷分解出來的分量是不是目標信號,如果是,說明已經檢測到目標,則不再進行下面步驟的操作;否則,繼續下面步驟。
步驟4從信號f(n)中濾除f1(n)。構造信號fc為
(11)
該過程將f1(n)分量補償到歸一化頻率零處。構造阻帶為歸一化頻率0.002,阻帶衰減為-60dB,凹口位于歸一化頻率0處的31階陷波器h(n),對fc(n)濾波并進行頻率校正,得到信號fr(n)的表達式如下:
(12)
其中,?表示卷積。
步驟5令f(n)=fr(n),并將其中的分量按能量從大到小的順序命名為f1(n),f2(n)…。重復步驟1到5。
由于海雜波的頻域擴展性,基于S方法信號分解的目標檢測方法會將海雜波分解成多個大能量的分量,同時會將海面目標信號分解成多個分量,降低了信號的能量。而文中方法,將海雜波和目標回波分別分解成一個或兩個信號分量,較大地提升了算法的效率。所以在文中方法中,可認為如果3次迭代后沒有檢測到目標,則認為該回波信號中只有海雜波,沒有目標信號。
2 實驗結果與分析
文中所有的極化方式為垂直極化(VV)海雜波數據(19 931 107_135 603_starea.cdf)是在浪高2.1 m時由X波段雷達在低入射角情況下收集的[15]。雷達工作在燒穿模式,脈沖重復頻率為1 000 Hz(對應歸一化頻率為1),帶寬為5 MHz。該數據包含14個相鄰的距離單元和131 072次回波。目標信號位于第9距離單元,影響第8~11距離單元。
2.1 仿真目標的檢測與分析
圖1(a)為第1個距離單元內海雜波的頻譜,可以看出海雜波的能量主要集中在歸一化頻率-0.08~0.02之間。通過長為512(0.512s)的滑動漢明窗從第1個距離單元內取數,每一次取出的數據之間有50%的重合,將窗內數據進行快速傅里葉變換后依據最大值歸一化,得到歸一化譜圖,部分結果顯示在圖1(b)中。可以看出,X波段海雜波的瞬時頻率中心和帶寬是不均勻的[2],海雜波的主體位于0 Hz~-50 Hz之間(歸一化頻率為0~-0.05),同時在0 Hz~50 Hz之間(歸一化頻率為0~0.05)也有能量擴展。
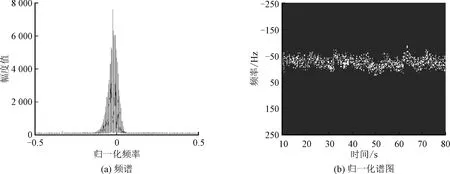
圖1 第1個距離單元內的回波數據
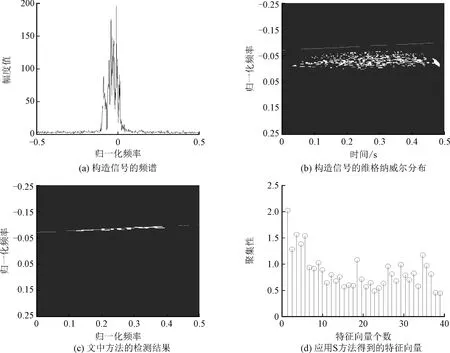
圖2 文中方法和基于S方法的信號檢測結果
仿真產生慢速微弱目標信號S1(n)=b1exp(-π((n-250)/400)2)exp(-j2π(0.000 05n2+0.05n))其中,0≤n≤511,b1為信號幅度。將S1(n)加入海雜波(第5距離單元的第63 489-64 000點,其雜噪比為19.5 dB)中構造一個信雜比為-10 dB的海面回波信號,利用文中方法和基于S方法的檢測結果如圖2所示。從圖2(b)和(c)可以看出,通過文中方法檢測出的目標信號與實際信號是一致的,而圖2(d)顯示了經S方法分解后信號S1(n)的特征向量的時頻聚集性,檢測結果為構造信號中不含目標,是一個漏警。
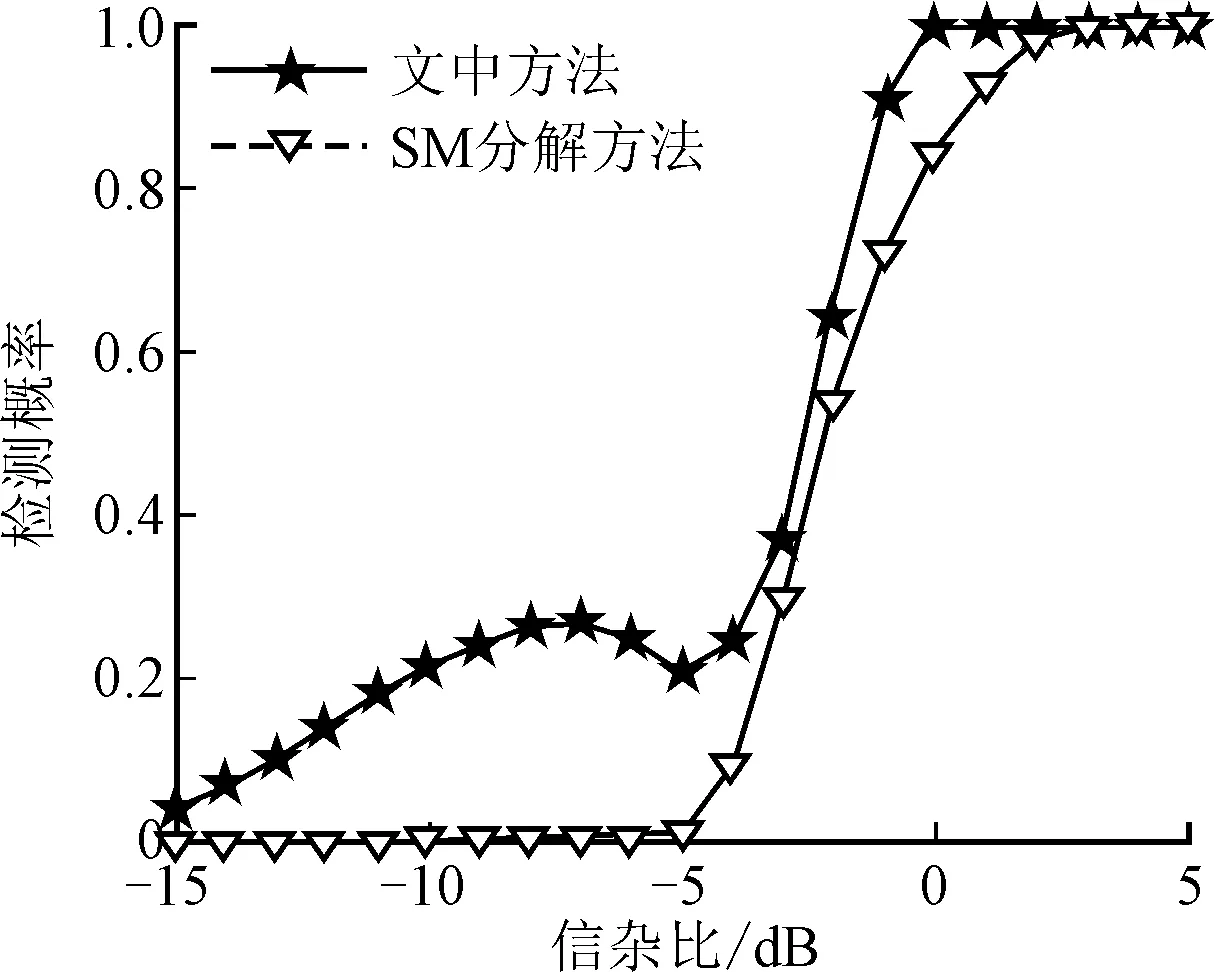
圖3 檢測概率
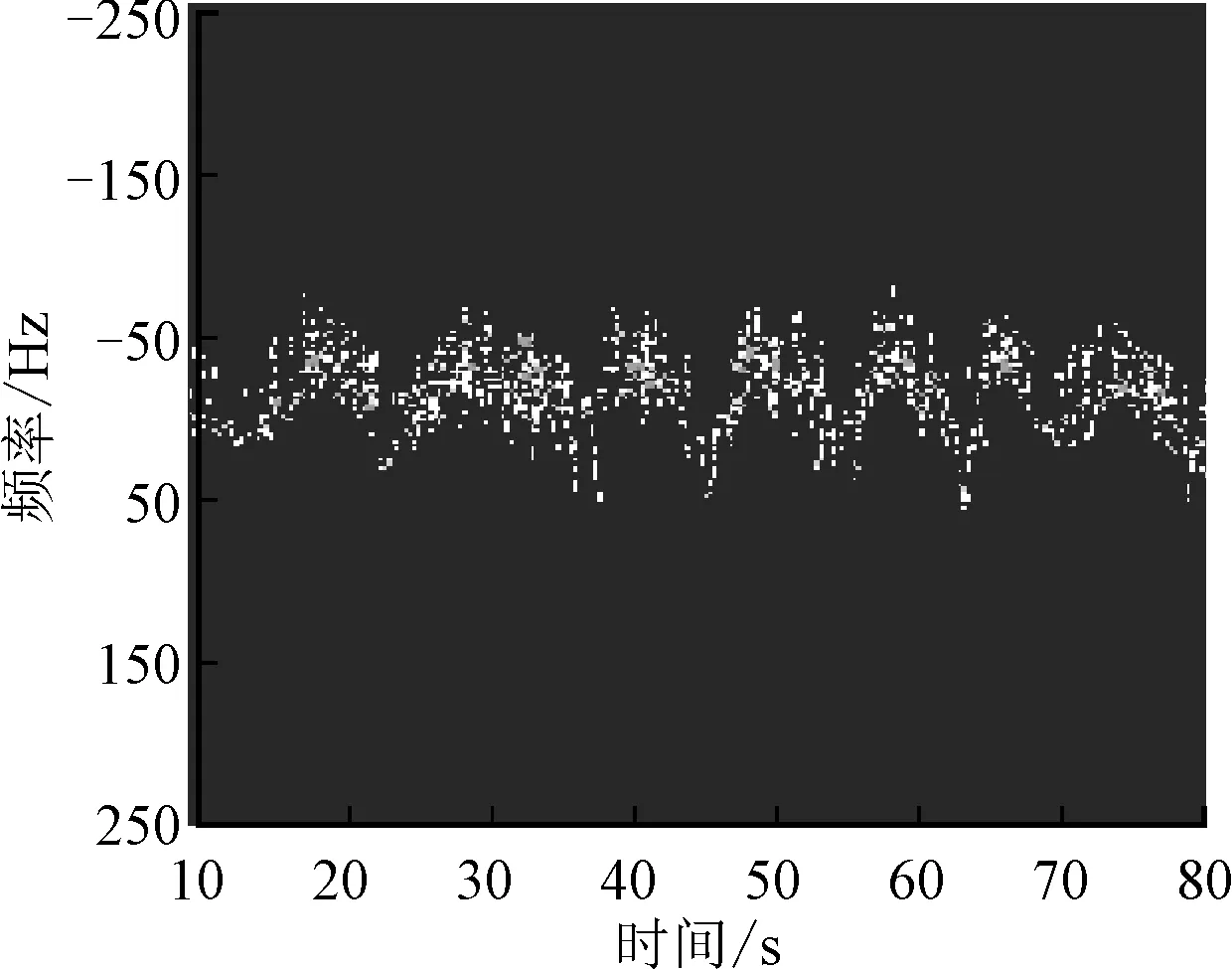
圖4 第9個距離單元內回波數據的歸一化譜圖

2.2 實際目標的檢測與分析
已知第9個距離單元內有一個微弱目標,該目標在與其相鄰的距離單元內仍然可見[15]。該距離單元的歸一化譜圖顯示在圖4中。從中可以看出,當長波長海浪經過該距離單元時,海雜波的帶寬和頻率中心較大,目標淹沒在海雜波中;當沒有長波長海浪經過時,目標較為明顯。因此文中從第9個距離單元中取兩組典型的長為512的回波數據,其起始點分別為60 s(長波長海浪經過該距離單元)和 64 s(該距離單元內沒有長波長海浪)。
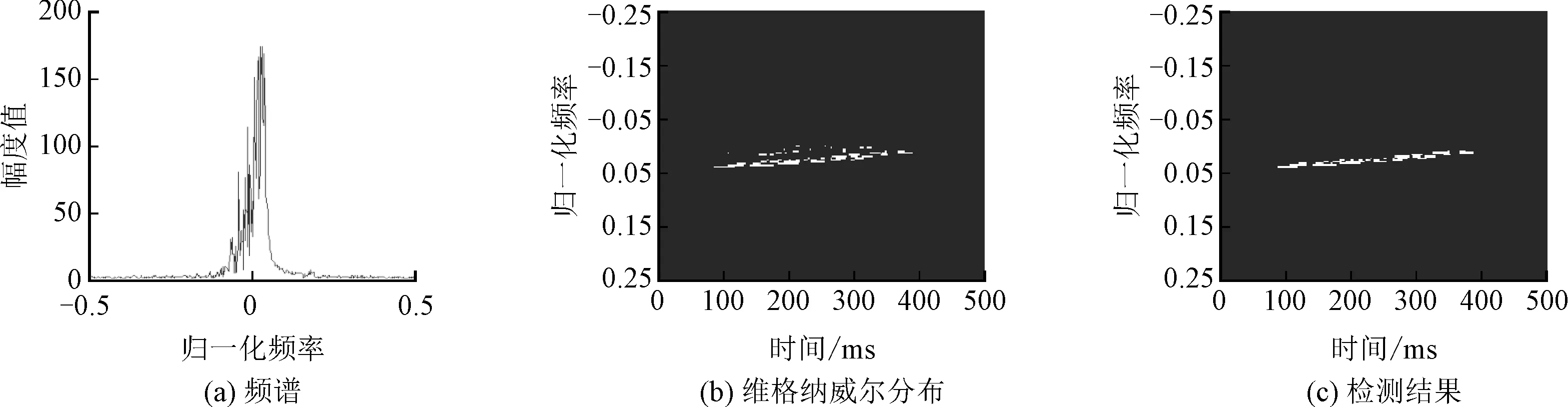
圖5 60 s處數據的目標檢測結果
圖6 64 s處數據的目標檢測結果
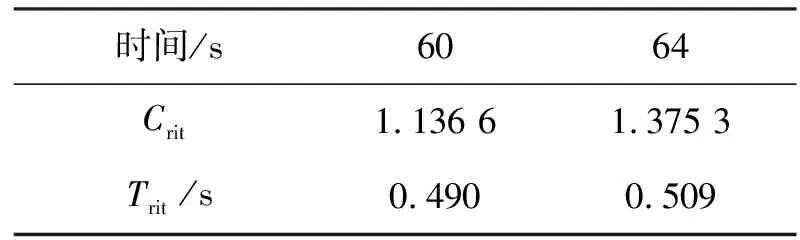
表1 檢測結果
兩組數據的頻譜分別顯示在圖5(a)和圖6(a)中,由于目標信號在頻域的位置與海雜波重合,因此無法在頻域檢測出目標。兩組數據的維格納威爾分布分別顯示在圖5(b)和圖6(b)中,從中可以較明顯地觀測到目標信號。應用文中方法對這兩組數據進行目標檢測,其判別過程(P0=1,T0=0.3s)如表1所示。檢測出的目標信號的維格納威爾分布分別顯示在圖5(c)和圖6(c)中。從中可以看出,海面固定目標在不同的時刻具有不同的運動狀態,相應地,其多普勒頻率也不同。在第1組數據中,目標處于勻加速運動狀態,這是由長波長海浪經過引起的。在第2組數據中,目標近似勻速運動,速度接近于-0.15m/s。
目標在第8個距離單元內依然可見,但能量較小,因而具有較低的信雜比。從第8個距離單元內抽取出第13.5s處的數據,其頻譜和維格納威爾分布分別顯示在圖7(a)和7(b)中,從中都無法判斷該數據中是否含有目標。應用文中方法檢測海面目標。其中一分解出的信號分量滿足Crit=1.120 9,Trit=0.448 s,據此判定該段數據中含有目標。圖7(c)為檢測出的目標信號的維格納威爾分布,從中可以看出目標在該時段處于勻速運動狀態且運動速度較小。
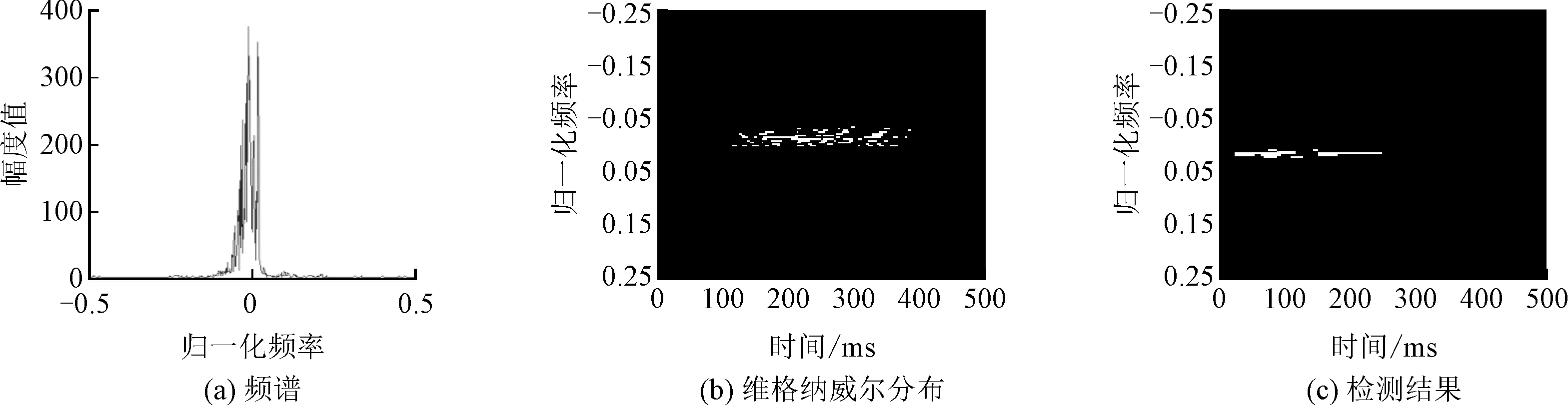
圖7 第8個距離單元目標檢測
3 結束語
筆者提出了一種基于時頻迭代分解的海面慢速微弱目標檢測方法。相對于基于S方法的信號分解方法,筆者提出的方法分解X波段的海面回波時將海雜波作為一個或兩個信號分量分解出來,并且不會將目標信號分裂成多個部分,從而降低了海面目標檢測的虛警。同時該方法對于在時頻域部分重合的信號具有較強的分辨能力,適合在低信雜比情況下檢測海面慢速運動目標,同時該方法用樣適用于檢測海面高速目標。對包含仿真目標與實際目標的海面回波數據的檢測結果表明,筆者提出的方法能以較高的精度從海面回波中檢測出慢速微弱目標,并且能夠得到目標的運動特性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
