基于波段權重的多尺度Retinex遙感圖像漸暈校正方法
2019-11-11 06:57:04鮑一丹李藝健朱姜蓬岑海燕
農業工程學報 2019年17期
關鍵詞:方法
鮑一丹,李藝健,何 勇,朱姜蓬,萬 亮,岑海燕
基于波段權重的多尺度Retinex遙感圖像漸暈校正方法
鮑一丹,李藝健,何 勇,朱姜蓬,萬 亮,岑海燕※
(浙江大學生物系統工程與食品科學學院,杭州 310058;農業農村部光譜檢測重點實驗室,杭州 310058;浙江大學現代光學儀器國家重點實驗室,杭州 310027)
針對傳統函數逼近法存在的校正質量不穩定、耗時長以及Retinex算法存在的光暈、泛灰和光譜數據失真的問題,該文提出了一種帶光譜恢復的多尺度Retinex漸暈校正方法。通過對無人機遙感圖像全局亮度的估計以及光譜恢復因子的引入,實現無人機遙感光譜圖像的漸暈校正。利用該文方法對遙感圖像進行處理,并與基于高斯曲面的函數逼近法和多尺度Retinex算法結果進行對比,依據灰度分布情況、標準差、平均梯度、清晰度、光譜相關系數以及光譜角指標進行評價分析。試驗結果表明,該文提出的方法可以取得較好的漸暈校正效果,結果不存在光暈、泛灰現象,結果的平均梯度和清晰度均值分別為0.077 4和49.33,相較原始圖像和函數逼近法以及多尺度Retinex算法處理結果,平均梯度分別提高了5.94%、5.56%和4.78%,清晰度分別提高了8.94%、6.79%和6.63%,該文方法校正圖像的對比度和清晰度更優,方法具有較好的漸暈校正效果。
遙感;圖像處理;Retinex理論;光譜恢復;漸暈校正
0 引 言
智慧農業通過先進的數據采集技術和網絡通信技術等實現在整個農業生產和加工過程中的自動化生產[1]。其中,光譜和成像技術能夠快速無損獲取作物養分生理信息,并能有效地對作物長勢和逆境脅迫響應進行動態監測,對實現農業的精準化、數字化、信息化及智能化管理和作業具有重要意義[2]。隨著無人機及小型光譜相機技術的發展,利用無人機搭載光譜成像設備獲取作物表型信息成為可能[3]。無人機近地遙感能夠快速、高通量地獲取大田作物信息。相比衛星遙感,具有分辨率高、運行周期、受天氣狀況影響小等優點[4-5],成為近年來的研究熱點。
無人機受到續航時間等限制,其搭載的光譜相機需要進行微型化設置,導致鏡頭光通路受限,在成像時出現漸暈現象,即影像灰度分布出現中間亮,邊緣暗的情況[6]。通常光譜相機傳感器感光范圍寬,采集的光譜數據易受到二次諧波的影響,為了消除這一影響,光譜相機通常需要外加濾光片,導致光譜圖像的漸暈現象更加嚴重[7],最終影響光譜成像數據的質量和后期圖像拼接、特征提取、目標檢測以及分類識別等結果[8]。
傳統的漸暈校正方法可以分為以下2類:查表法(look-up-table,LUT)和函數逼近法(function approximation method,FAM)[9]。查表法是在適當理想的條件下采集標準圖像并獲得各個像素的衰減因子,得出各像素相應的校正因子表,然后對圖像的對應像素點進行校正[10]。函數逼近法通過選擇合適的函數來擬合圖像中灰度值變化,以尋求一種可以解釋漸暈圖像灰度變化的漸暈模型,根據這一模型來得到各像素點的校正因子[11]。查表法需要特定的均勻光照條件及其他理想條件,在工程實現上較難。函數逼近法假定一個特定的漸暈模型,不同圖像的特征會影響函數的擬合結果,導致圖像的校正質量不穩定[12],且函數逼近法屬于迭代優化算法,耗時較長。
因此,為了得到更好的去漸暈效果以及更高的效率,需要尋找一種新的思路來去除遙感圖像中因漸暈導致的亮度不均勻現象。Retinex圖像增強算法被廣泛應用于圖像去霧領域,近年來部分學者將其引入影像灰度不均勻修復領域[13]。如Li等[14]將多分辨率變分Retinex模型引入遙感影像處理,實現遙感圖像的亮度不均勻性校正。Kwok等[13]將單尺度Retinex算法改進為邊緣提取算法,并通過非線性強度映射實現了低照度圖像的恢復。
Retinex理論可以修復圖像灰度不均勻的現象,但也存在一定局限性。基于以上思想,本文將其引入遙感圖像的漸暈校正方法并進行改進,從而實現圖像較好的漸暈校正效果。
1 數據與方法
1.1 低空遙感圖像的獲取
低空遙感圖像由八旋翼電動無人機搭載的XIMEA xiQ系列 CMV2K-SSM5×5型多光譜工業相機(IMEC,Leuven,Belgium)采集,飛行高度為25m,飛行速度為2.5 m/s。該多光譜相機為基于Fabry-Pérot結構的mosaic型光譜相機,單幀成像可采集25個波段(600~1 000 nm)的光譜圖像,單波段圖像分辨率為409×216像素,圖像位深為10 bits。
采集的遙感圖像所覆蓋區域為浙江省諸暨市安華鎮三聯村糧食功能產區(120°6′7.99″E,29°30′55.52″N),種植作物為水稻,采集面積為6 667 m2。圖像采集的時間為2017年8月27日上午09:31-09:40,環境照度變化范圍為60 000~80 000 lx。一個架次共計200張多光譜圖像,每幅圖像均存在明顯的漸暈效應。
1.2 帶光譜恢復的Retinex漸暈校正方法
1.2.1 Retinex理論
Edwin Land和McCann提出了以人類視覺系統對亮度和顏色感知模型為依據的Retinex理論[15]。Retinex理論假設圖像I由2部分組成:亮度分量和反射分量,二者的乘積即為圖像本身[16]。其基本理論模型如式(1)所示。

式中(,)為圖像中像素點的坐標。反射分量描述了物體的輻射度和空間屬性,而亮度分量是圖像中漸暈效應或其他亮度變化的原因[14],去除亮度分量L可以實現對圖像中亮度不均勻的校正。
1.2.2 Retinex算法
根據Retinex理論,Retinex算法要解決的核心問題是對原圖像的亮度分量和反射分量進行估算[17]。目前Retinex算法主要發展出了以下4種:基于路徑比較、基于迭代、基于中心/環繞和基于可變框架模型的Retinex算法[18-19]。在這4類算法中,基于中心/環繞的Retinex算法運算過程更加簡單,算法效率更高且效果表現更好[14],因此單尺度Retinex算法(single scale retinex,SSR)、多尺度Retinex算法(multi-scale retinex,MSR)等基于中心/環繞的Retinex算法應用更多。
Jobson等[20]認為亮度分量為圖像中變化緩慢的部分,可以由環繞函數和相應通道的亮度分量進行卷積得到(,)分量。常用的環繞函數為高斯函數[21],采用式(2)計算。
多尺度Retinex算法是在估計圖像亮度分量時計算多個尺度的SSR并進行加權平均來實現的,其數學模型見式(3)。

式中表示尺度數目,σ表示第個尺度參數,ω為第個尺度參數的權重。
1.2.3 帶光譜校正的Retinex漸暈校正方法
基于中心/環繞的Retinex算法存在的最主要2個缺點[14]是:1)產生光暈效應;2)不同通道的圖像灰度相關性損失,即圖像光譜信息失真。基于中心/環繞的Retinex理論假設亮度分量是平滑的,而實際在明暗突變過渡區域并非如此,這導致在過渡區亮度分量估計錯誤而產生光暈現象。圖像光譜信息失真的原因是每個通道的圖像各自估計亮度分量,而沒有考慮各通道之間的相關性[14]。
為了解決以上2個缺點,本文提出一種帶光譜恢復的多尺度Retinex(multi-scale retinex with spectrum restoration,MSRSR)漸暈校正方法,其偽代碼及流程示意圖分別如表1和圖1所示。
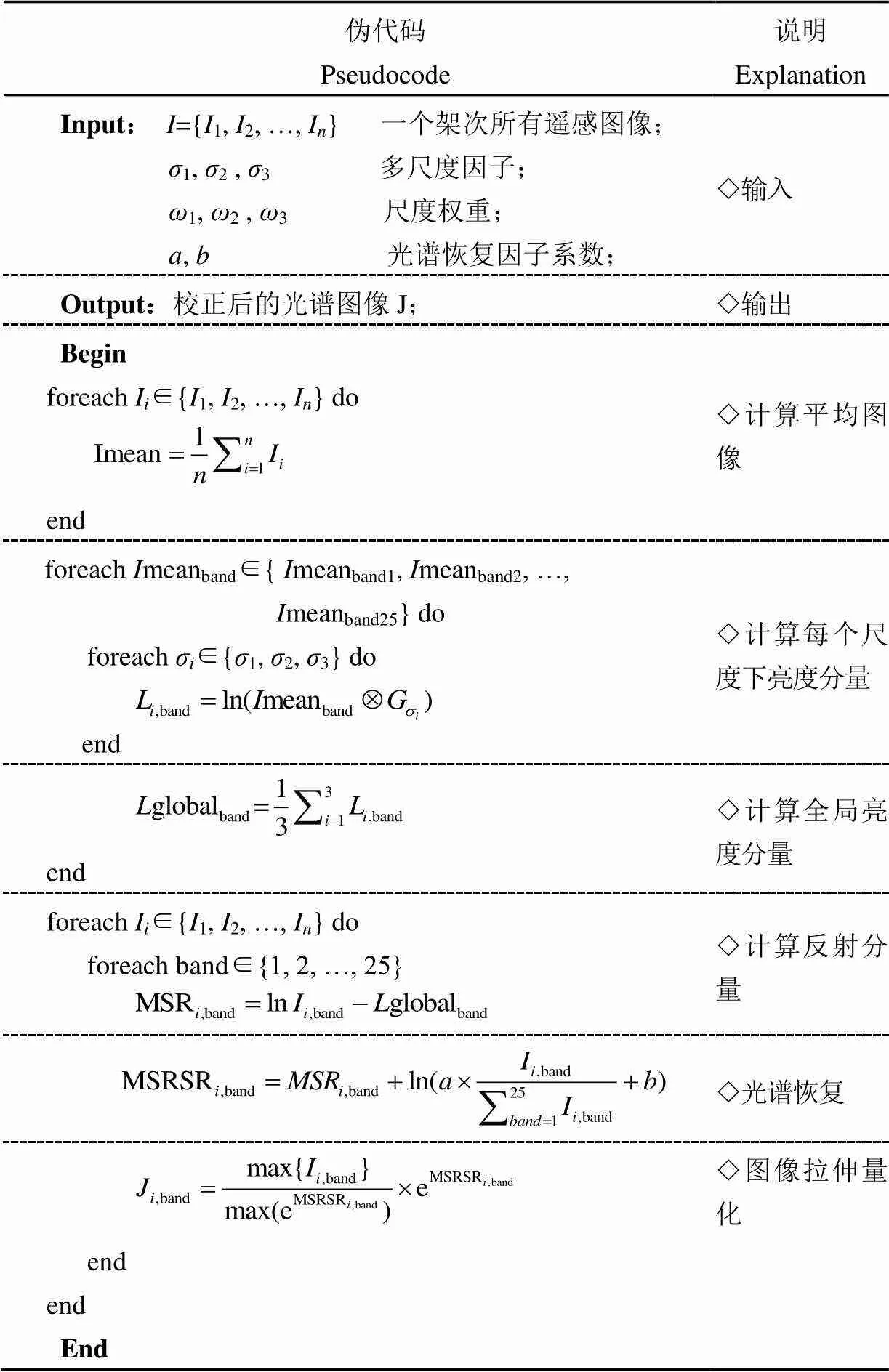
表1 帶光譜恢復的多尺度Retinex(MSRSR)方法偽代碼
由于漸暈現象中圖像呈現整體亮度由中心向四周遞減的現象,且這一變化是平滑的,而使用SSR或MSR算法提取的亮度分量會受到物體邊緣信息和明暗突變區域的影響,這導致提出來的亮度分量并不符合漸暈效應中圖像亮度平滑的變化規律。為解決這一問題,本文基于一個架次所有飛行圖像的平均圖像提取僅與漸暈效應和環境亮度相關的全局亮度分量,這一亮度分量符合漸暈現象中亮度由中心向四周平滑遞減的規律。基于以上思想,為了提取造成漸暈現象的亮度變化分量,用集合描述一個架次飛行獲取的張遙感圖像,見式(4)。
各個波段的平均圖像meanband計算如式(5)。

猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
