神經網絡信息融合創建機器人柵格地圖研究
2019-11-15 04:45:39徐美清劉洞波
科技資訊 2019年21期
徐美清 劉洞波

摘? 要:該文主要研究未知環境下移動機器人柵格地圖的創建方法。針對聲納傳感器感知數據的不確定性,首先根據模糊邏輯和概率理論解釋多個聲納的測距信息,然后使用模糊隸屬度及概率表示柵格占用狀態。通過神經網絡在特征級的信息融合來減弱聲納傳感器測量數據的測量誤差,得到一個對環境的整體表示。仿真結果表明,這種方法通過多個不同傳感器的測量值對同一柵格的解釋,可以有效增加數據可靠性、提高數據精度、減小噪聲干擾。總之,這個方法有著很好的健壯性以及準確性。
關鍵詞:移動機器人? 柵格地圖? 地圖創建? 神經網絡? 信息融合
中圖分類號:TP183 ? ?文獻標識碼:A 文章編號:1672-3791(2019)07(c)-0011-02
為實現移動機器人的自主動作和行為,必須利用機器人的感知信息來建立未知工作環境的模型。柵格地圖是移動機器人環境地圖創建的一種重要表示模型,由Moravec H.P和Elfes.A提出[1],這個模型把機器人所在的工作空間環境劃成了幾個整齊的柵格,利用提取每個柵格單元的狀態來確定環境問題。
通常,移動機器人利用激光測距儀、紅外探測器、聲納等測距類傳感器感知環境信息并創建柵格地圖[2]。其中,聲納傳感裝置的優點很多,比如售價便宜、操作簡潔、信息處理容易等,因此它在移動機器人設計行業中的使用較為頻繁。但是它也存在一些弊端,例如精度低、多重反射等,對于信息的感知也極不穩定。為了能夠更好地解決上述缺陷,綜合考量多個傳感器空間的相關性,該文將神經網絡對使用概率、模糊邏輯知識的解釋多個聲納獲取到的數據進行相應的信息融合,獲得表示柵格狀態{障礙物,不確定,空閑}的新概率值,最后采用貝葉斯更新模型更新柵格,以建立表示環境的柵格地圖。實驗結果表明,利用該文提出的方法所創建的地圖準確度高、魯棒性好。
1? 神經網絡信息融合創建柵格地圖
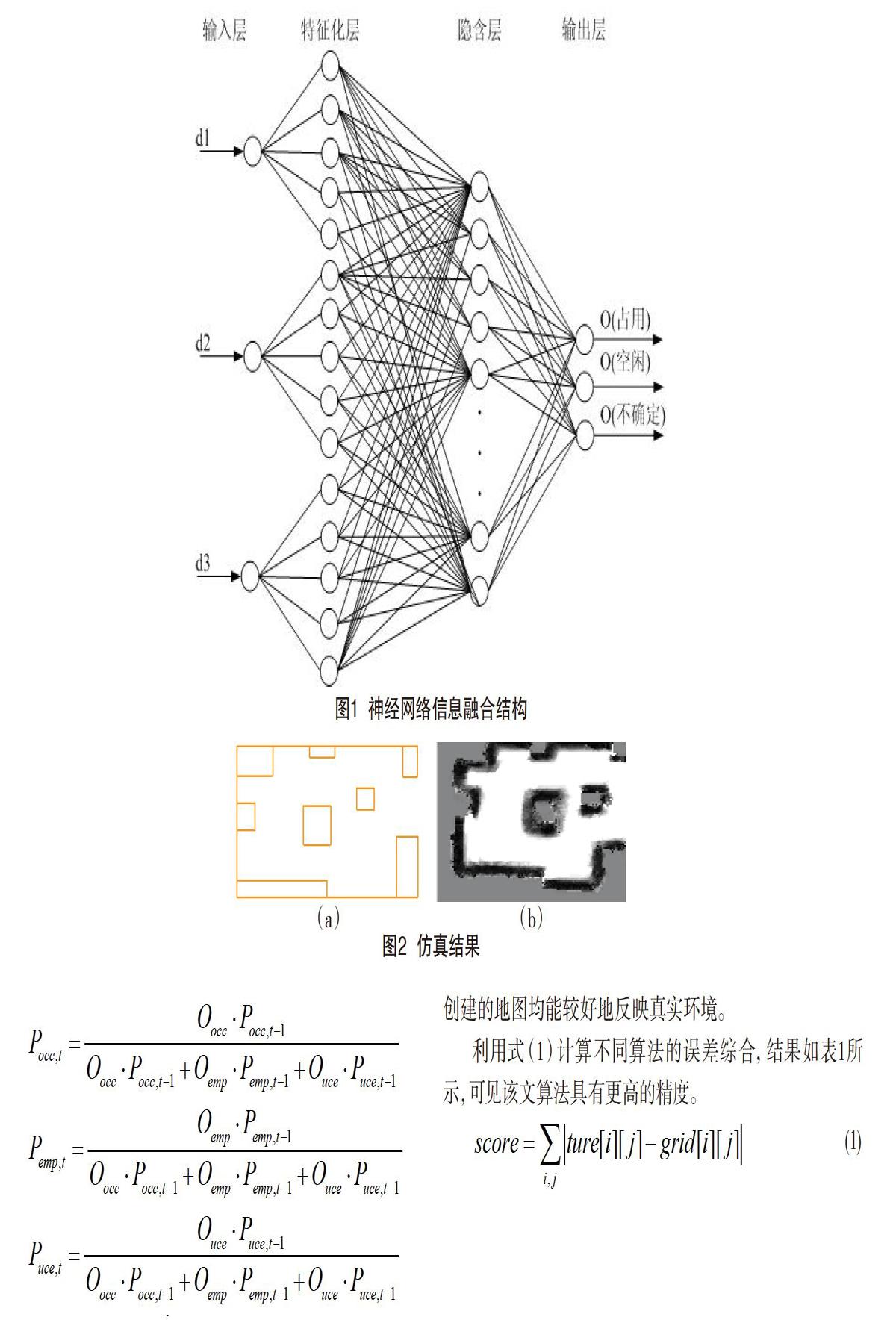
對于單個聲納數據分別采用模糊邏輯和概率理論進行解釋,然后輸入到神經網絡,采用這種方法,一方面,能充分結合模糊邏輯、概率理論聲納解釋模型的優勢;另一方面,把一維數據映射到高維特征空間。這一操作的目是為了降低問題的非線性,將其盡可能地轉變成高維空間中的線性問題。因為一個柵格可以同時被多個傳感器所探測到,所以使用多個傳感裝置在空間上進行相互補充,將所有的測量值用于描述同一個柵格,增加數據可靠性、提高數據精度。下面介紹該文提出的獲取柵格當前狀態值的神經網絡信息融合結構,如圖1所示。在輸入層和隱含層之間加入了一個特征化層,將每一個輸入變量擴展成為5個輸入變量。
網絡框架整體涉及4個層級。最關鍵的一層也就是輸出層包括了3個神經元,分別為3個與當前計算柵格最相關的傳感器的測量值(d1、d2、d3)。然后,利用概率理論和模糊邏輯,將輸入神經元轉化為5個特征神經元,即{障礙物,空閑,占用,不確定,空}。隱含層的神經元個數設計為31個,傳遞函數采用S型正切函數。輸出層有3個節點,輸出值分別為O=[Oocc,Oemp,Ouce],其中第1個代表柵格部分被占用狀態的可能性大小,第2個代表柵格部分為空閑狀態的可能性大小,第3個表示柵格單元為不確定狀態的概率值。整個網絡結構為3∶15∶31∶3,除輸入層到特征化層的連接權值為1外,其余各層之間的連接權值均可調。
該種樣本的獲取流程:把機器人安置在已探明的室內環境當中,指示其進行直線運動、旋轉運動,隨機連續多次采集機器人位姿和聲納傳感器測量數據,隨后使用典型的Levenberg-Mar quardt算法對神經網絡做出訓練,其學習率只有0.01,選擇通用近似均方差函數作為性能指標函數,若誤差是2.5×10-5的時候訓練終止。
針對相同柵格單元,能夠包含多個時間段的多種解釋,要想獲得更加精準的解釋,應當對這些信息進行集成。要想防止計算變得復雜,確保地圖創建算法的增進式處理,集成模式使用Bayesian集成模型,其更新手段為:對于柵格單元mi,j的3個可能狀態在一開始可能均為1/3,利用測量數據序列S=(S(1),…,S(T))后,這里面的S(n)代表3個與現在計算柵格關聯最密切的傳感裝置測量值序列,對應相關集成的概率高低依次為:
2? 仿真實驗研究
為了驗證該文提出地圖創建方法,在AS_R型機器人上開展實驗。圖2(a)為實驗環境的理想表示,機器人通過傳感器獲得的環境信息使用該文的融合算法建立的走廊和教室的環境地圖如圖2(b)所示,可以看出,該文算法所創建的地圖均能較好地反映真實環境。
利用式(1)計算不同算法的誤差綜合,結果如表1所示,可見該文算法具有更高的精度。
3? 結語
該文提出的方法與其他方法相比有如下優點:(1)使用模糊邏輯方式、概率相關理論依次解釋聲納數據資料的結果并做出相應結合,具體可以結合相關模型健壯性以及精度的問題;(2)基于多個傳感裝置對相同柵格的測量結果的作用,結合附近傳感裝置信息生成更加精確的相關問題,可大幅減少噪聲干擾、鏡面反射及多次反射的影響。
參考文獻
[1] Siciliano B,Khatib O.Springer handbook of robotics[M]. Springer,2016.
[2] 劉丹,段建民,于宏嘯.基于自適應漸消EKF的Fast SLAM算法[J].系統工程與電子技術,2016(3):644-651.
[3] 余洪山.移動機器人地圖創建和自主探索方法研究[D].湖南大學,2007.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
制造技術與機床(2017年3期)2017-06-23 08:11:21
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
