高速列車脫軌監(jiān)測關(guān)鍵算法研究
2019-11-16 11:06:27艾永軍陳春俊熊仕勇張振
中國測試 2019年10期
艾永軍 陳春俊 熊仕勇 張振

摘要:基于軌道不平順檢測技術(shù)的發(fā)展,根據(jù)輪軌幾何關(guān)系脫軌理論,設(shè)計一種能夠工程實施的脫軌監(jiān)測方案,采用輪軌橫向、垂向相對位移近似替代輪對接觸點位移和車輪抬升量來判斷列車脫軌。針對測控方案中關(guān)鍵參數(shù)軸箱振動位移測量困難、測量誤差大的問題,使用卡爾曼濾波設(shè)計一種估計算法,實時計算軸箱橫向、垂向位移;觀測噪聲方差變化會導(dǎo)致卡爾曼濾波發(fā)散,采用小波變換在線估計噪聲方差,提高卡爾曼濾波算法魯棒性。仿真表明:該算法能夠通過加速度信號精確計算軸箱振動位移,誤差在10%以內(nèi),為高速列車脫軌在線監(jiān)測提供一種思路。
關(guān)鍵詞:高速列車;安全性;脫軌監(jiān)測;卡爾曼濾波;小波變換
中圖分類號:U229 文獻標志碼:A 文章編號:1674-5124(2019)10-0109-05
0 引言
隨著復(fù)興號的正式運營,中國高鐵最高時速已達400km/h。高速列車的安全運行是提速的基本前提,目前列車運行安全性由脫軌系數(shù)、輪重減載
收稿日期:2019-02-17;收到修改稿日期:2019-03-18
基金項目:國家自然科學基金資助項目(51475387)
作者簡介:艾永軍(1992-),男,安徽蕪湖市人,碩士研究生,專業(yè)方向為高速列車自動化控制與檢測。
通信作者:陳春俊(1967-),男,四川蒲江縣人,教授,研究方向為高速列車測試、診斷與控制等。率等指標衡量,主要方法是使用測力輪對測得輪軌力進而計算脫軌安全性指標來評判列車安全性[1]。但由于測力輪對維護困難,并不適用于高速列車脫軌的在線監(jiān)測[2]。
列車脫軌在線監(jiān)測是軌道交通領(lǐng)域研究的難點和熱點之一。近年來,為實現(xiàn)高速列車脫軌在線監(jiān)測,國內(nèi)外學者對此進行了大量探索。日本學者城取岳夫等[3]在轉(zhuǎn)向架上安裝加速度傳感器,將采集到的加速度數(shù)據(jù)與預(yù)先建立好的加速度統(tǒng)計特征數(shù)據(jù)庫數(shù)據(jù)進行對比,依據(jù)振動加速度的波形特征判斷是否脫軌,但數(shù)據(jù)庫建立難度大。唐永康[4]通過位移傳感器、加速度傳感器,實時檢測車輪與鋼軌的橫向與垂向相對位移、作用力和車輪加速度,通過綜合判據(jù)來監(jiān)測車輛脫軌。輪軌相對位移可以反映車輛運行安全狀態(tài),鐘莎[5]將攝像機固定在轉(zhuǎn)向架上,通過圖像處理的方法計算輪軌相對位移,以實現(xiàn)列車安全運行監(jiān)測目的,但忽略了構(gòu)架與輪對之間的相對振動。
隨著我國軌道不平順技術(shù)的發(fā)展,本文旨在基于軌道不平順檢測技術(shù)基礎(chǔ)上對列車脫軌進行監(jiān)測。王衛(wèi)東[6]采用激光攝像機研制的GJ-6型軌道檢測系統(tǒng),提高了系統(tǒng)處理速度,最高達到400km/h檢測要求。熊仕勇[7]基于數(shù)字激光測量和慣性測量研制的軌道不平順檢測系統(tǒng),檢測誤差在1mm以內(nèi)。
基于軌道不平順檢測技術(shù),提出一種通過軸箱上安裝加速度傳感器監(jiān)測列車脫軌方案,使用卡爾濾波設(shè)計脫軌監(jiān)測關(guān)鍵算法,并通過小波變換對算法進行優(yōu)化。建立了動力學仿真模型并獲得數(shù)據(jù),驗證算法的正確性。
1 輪軌幾何關(guān)系判斷脫軌原理
1.1 車輪抬升量判斷脫軌原理
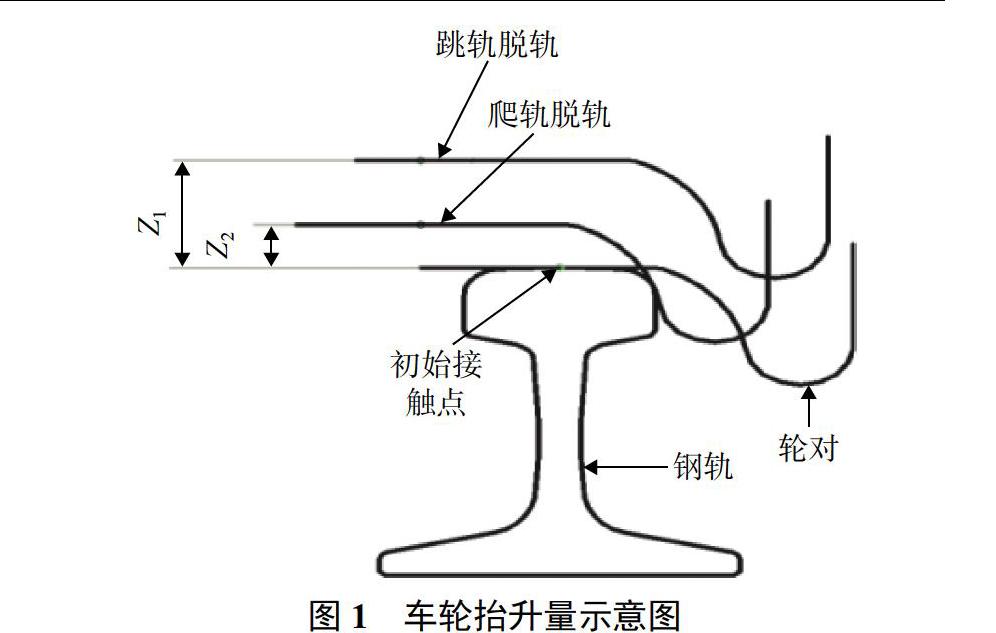
針對脫軌指標在某些情況下不能準確反映列車脫軌狀況,翟婉明等[8]提出了一種車輪抬升量判定脫軌原理。列車脫軌表現(xiàn)為車輪脫離鋼軌,直接從輪軌幾何關(guān)系來判斷車輛脫軌是一種可行的方法。車輪抬升量定義為車輪踏面名義接觸點與鋼軌頂面最高點的垂向距離,其原理如圖1所示。
只要車輪抬升量小于輪緣高度,理論上車輪尚未擺脫鋼軌約束。因此以輪緣高度為臨界點,采用車輪抬升量判斷車輛脫軌與否,可表示為
Z1,2
在計算機仿真計算中,系統(tǒng)需要進行離散化,針對本文處理問題,離散狀態(tài)空間方程可表示為
Xk=FXk-1+Gvk
Zk=HXk+wk(3)
式中:Xk——k時刻的系統(tǒng)狀態(tài);
F——狀態(tài)轉(zhuǎn)移矩陣;
G——噪聲輸入矩陣;
Zk——k時刻系統(tǒng)觀測輸出;
H——觀測矩陣;
v(k)——系統(tǒng)噪聲;
w(k)——觀測噪聲。
卡爾曼濾波是利用當前的觀測值和上一時刻的估計值更新當前時刻的估計值,其計算過程為:
1)設(shè)估計狀態(tài)初始值為X5。協(xié)方差初始值為P5。
2)不考慮系統(tǒng)噪聲,根據(jù)狀態(tài)方程進行一步預(yù)測,得到狀態(tài)預(yù)測值Xk|k-1:
Xk|k-1=FXk-1(4)
3)根據(jù)上一時刻協(xié)方差計算下一時刻協(xié)方差預(yù)測Pk|k-1:
Pk|k-1=FPk-1FT+GQGT(5)
其中Q為系統(tǒng)噪聲方差。
4)計算卡爾曼濾波增益Kk:
Kk=Pk|k-1HT(HPk|k-1HT+R)-1(6)其中R為觀測噪聲方差。
5)結(jié)合觀測值,計算當前狀態(tài)的最優(yōu)估計諼Xk:?
Xk=Xk|k-1+Kk(Zk-HXk|k-1)(7)
6)計算當前時刻的協(xié)方差矩陣最優(yōu)估計值Pk:
Pk=(I-KkH)Pk|k-1(8)
其中:
H=1/T2[1 -2 1](11)
式中:α——狀態(tài)轉(zhuǎn)移矩陣可調(diào)參數(shù),0≤α<1;
T——采樣時間間隔。
2.3 基于小波變換的算法優(yōu)化
列車在行駛時,由于電磁干擾、環(huán)境突變等因素影響會導(dǎo)致觀測噪聲變化。當觀測噪聲方差改變時,會造成卡爾曼濾波精度下降,甚至導(dǎo)致卡爾曼濾波器發(fā)散。小波變換可實現(xiàn)信號和噪聲的分離,計算小波變換分離出來的噪聲方差,并將其反饋到卡爾曼濾波中更新模型,實現(xiàn)噪聲方差的實時估計[11]。
根據(jù)Stone-Weierstrass理論,任一有界閉區(qū)間的連續(xù)函數(shù)都可以由該區(qū)間內(nèi)的多項式以任意精度逼近[12]。根據(jù)上述定理,加速度信號z(t)可表示為
z(t)=a00+a1t+…+aMtM(12)
其中ai為多項式系數(shù)(i=1,2,…,M)。
含噪聲的加速度信號Z(t)可表示為
Z(t)=Z(t)+W(t)(13)
根據(jù)小波理論內(nèi)容,ψ(t)為小波函數(shù),其平移變換和尺度變換可表示為
式中:a——伸縮因子;
b——平移因子。
則含噪聲的加速度信號Z(t)小波變換可表示為
WZ(a,b)=Z(t)*ψa,b(t)=WZl(a,b)+WZh(a,b)(15)
式中:(*)——卷積算子;
WZl(a,b)——小波系數(shù)近似部分;
WZh(a,b)——小波系數(shù)細節(jié)部分。
根據(jù)小波的消失矩理論,若ψ(t)有N個消失矩,且大于M,即N>M,則
由式(16)知,小波變換抑制了信號而保留了噪聲分量,則式(15)可表示為
WZ(a,b)=Z(t)*ψa,b(t)=WZh(a,b)(17)
在t時刻噪聲的標準差估計值σ為
其中Med(·)為中值函數(shù)。
觀測噪聲方差計算過程如圖4所示。為實時計算觀測信號噪聲方差,可選擇一定長度的滑動觀測窗口,本文仿真時選取時長為0.5s的滑動窗口。對窗口內(nèi)的觀測信號Z(t)進行小波變換,計算噪聲方差并更新卡爾曼濾波的方差數(shù)據(jù)。
3 仿真分析
3.1 仿真數(shù)據(jù)獲取
為獲取驗證算法數(shù)據(jù),建立高速列車模型。建模時考慮輪軌結(jié)構(gòu)的非線性接觸、減振器與橫向止檔等懸掛結(jié)構(gòu)的非線性特性,車輪采用LMA踏面、鋼軌采用60kg標準型鋼軌。利用某型高速列車物理參數(shù),建立高速列車多體動力學三維模型,如圖5所示。
對列車以350km/b速度進行仿真,軌道譜采用德國五級譜。仿真時間為10s,采樣頻率為5000Hz。采用軸箱部位的加速度數(shù)據(jù)和位移數(shù)據(jù)驗證算法。
3.2 算法驗證
考慮算法的計算速度,仿真選擇消失矩為7階的db小波進行小波變換,滑動觀測窗口長度為0.5s。為驗證觀測噪聲方差對算法的影響,對軸箱加速度數(shù)據(jù)分別加入不同方差的噪聲。第一次加入方差為0.01的噪聲,長度為10s;第二次在前5s加入方差為0.01的噪聲,從第5s開始噪聲方差突變?yōu)?.25。
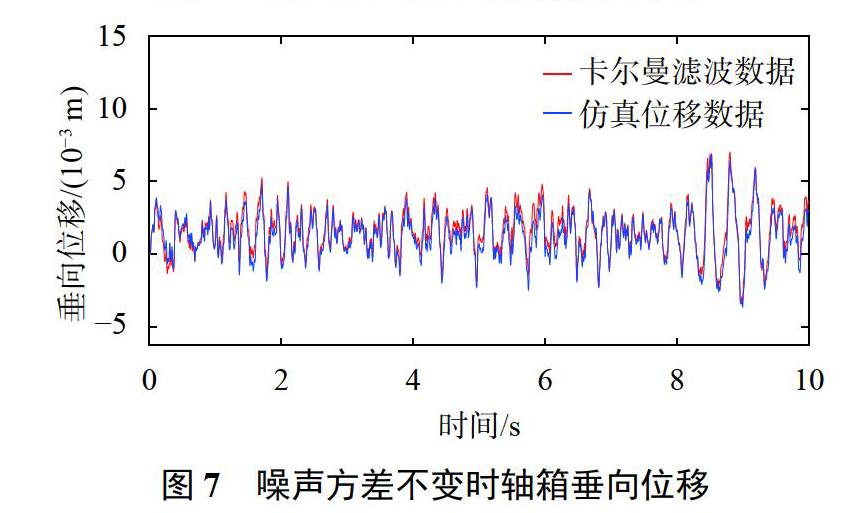
3.2.1 噪聲方差不變時計算結(jié)果
由圖6、7及表1可知,在噪聲方差固定時,采用卡爾曼濾波算法可以通過加速度數(shù)據(jù)對位移進行精確估計。其中橫向位移估計值峰值最大誤差為5.7%,垂向位移估計值峰值最大誤差為4.1%;位移估計結(jié)果和仿真位移數(shù)據(jù)相關(guān)系數(shù)大于0.9。以上分析說明,在算法中觀測噪聲方差準確時,卡爾曼濾波算法能精確估計出軸箱橫移位移和垂向位移,進而判斷列車脫軌狀況。
3.2.2 噪聲方差改變時計算結(jié)果
由圖8、9及表2可知,在5s時噪聲方差變?yōu)?.25,傳統(tǒng)卡爾曼濾波由于沒有自調(diào)整算法中方差數(shù)值能力,卡爾曼濾波算法計算結(jié)果出現(xiàn)一定程度發(fā)散現(xiàn)象,算法精度下降。其中橫向位移估計值峰值最大誤差為55.6%,垂向位移估計值峰值最大誤差為35.2%;橫向位移估計結(jié)果和仿真位移數(shù)據(jù)相關(guān)系數(shù)降低至0.681,垂向位移估計結(jié)果和仿真位移數(shù)據(jù)相關(guān)系數(shù)降低至0.835。不精確的濾波結(jié)果可能導(dǎo)致計算機對脫軌狀況的誤判。
使用小波變換在線計算觀測噪聲方差的卡爾曼濾波法,橫向位移估計值峰值最大誤差降低至5.2%,垂向位移估計值峰值最大誤差降低至3.1%;橫向位移估計結(jié)果和仿真位移數(shù)據(jù)相關(guān)系數(shù)提高至0.824;垂向位移估計結(jié)果和仿真位移數(shù)據(jù)相關(guān)系數(shù)提高至0.927。以上分析說明,使用小波在線計算噪聲方差的卡爾曼濾波能夠更好地應(yīng)對觀測噪聲方差的變化,提高算法抗干擾能力。
4 結(jié)束語
本文基于軌道不平順檢測技術(shù),提出一種通過軸箱上安裝加速度傳感器監(jiān)測列車脫軌方案,使用卡爾濾波設(shè)計脫軌監(jiān)測關(guān)鍵算法,并通過小波變換對算法進行優(yōu)化。
1)針對測力輪對維護困難,不適用于高速列車脫軌在線監(jiān)測的問題,基于軌道不平順技術(shù)的發(fā)展,根據(jù)輪軌幾何關(guān)系脫軌理論,從工程可行性角度出發(fā),設(shè)計了脫軌在線監(jiān)測方案。
2)針對測控方案中關(guān)鍵參數(shù)軸箱振動位移測量困難、測量誤差大的問題,基于卡爾曼濾波設(shè)計一種高速列車脫軌檢測關(guān)鍵算法,實時計算軸箱振動位移,并引入小波變換在線計算噪聲方差對算法進行優(yōu)化,提高卡爾曼濾波性能。仿真結(jié)果表明,在觀測噪聲方差突變時,算法計算峰值誤差為5.2%,具有較高精度。
參考文獻
[1]魏來,曾京,鄔平波,等.基于輪對模型的鐵道車輛脫軌安全性評估[J].鐵道學報,2015(9):25-31.
[2]王安吉,張兵,劉曉曼.輪軌垂向力制動臺連續(xù)測量系統(tǒng)[J].中國測試,2018,44(4):83-87,93.
[3]城取岳夫,王光明.利用轉(zhuǎn)向架振動加速度監(jiān)視車輛故障的方法研究[J].國外鐵道車輛,2014,51(5):36-41.
[4]唐永康.空載貨運列車脫軌檢測系統(tǒng)的研制[J1.工業(yè)控制計算機,2012,25(8):52-53.
[5]鐘莎.基于Qt的機車輪軌相對位移的圖像檢測系統(tǒng)設(shè)計[D].石家莊:石家莊鐵道大學,2016.
[6]王衛(wèi)東.高速鐵路基礎(chǔ)設(shè)施綜合檢測技術(shù)[M].北京:鐵道科學出版,2017.
[7]熊仕勇.軌道不平順檢測系統(tǒng)中關(guān)鍵技術(shù)研究[Dl.成都:西南交通大學,2018.
[8]翟婉明,陳果.根據(jù)車輪抬升量評判車輛脫軌的方法與準則[J].鐵道學報,2001,23(2):17-26.
[9]楊春雷,翟婉明.車輛動力學仿真中評判脫軌的直接方法[J].交通運輸工程學報,2002,2(3):23-26.
[10]衛(wèi)緯.車輛軌道系統(tǒng)運行安全綜合評價研究[D].北京:北京交通大學,2011.
[11]VIMALA C,PRIYA P A.Noise reduction based on doubledensity discrete wavelet transform[C]//InternationalConference on Smart Structures&Systems,2015.
[12]曹忠.基于卡爾曼濾波的電動車窗防夾控制系統(tǒng)研究[D].上海:華東理工大學,2015.
(編輯:商丹丹)
猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
科技資訊(2016年29期)2017-02-28 14:36:58
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
科技傳播(2016年7期)2016-04-28 00:00:02
中國科技博覽(2016年7期)2016-04-25 10:15:44
中國科技博覽(2016年14期)2016-04-25 09:55:10
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28