淺談全電洗掃車的行走系統
2019-11-17 06:43:38黃耀武
時代汽車 2019年20期
黃耀武

摘 要:以混合電能超級電容技術為平臺,研究了超級電容在環衛洗掃車上的應用,分析了行走系統的控制技術;矚望了該技術的發展前景。
關鍵詞:洗掃車;混合電能;超級電容;能量回收
1 引言
當前從國際大環境來看,全球能量緊張,石油價格暴漲,機動車數量激增,城市污染日趨嚴重,石油供給與市場需求的矛盾日趨突出。面對能源和環境問題的嚴峻挑戰,高效,節能和綠色電動汽車的發展將成為下一代汽車產業發展的主要方向。其中,混合動力電動汽車(鋰電池+超級電容器[1],稱為電動汽車)由于其在行駛中的技術性能和環保優勢而引起了廣泛的關注。
2 超級電容
超級電容是近年來興起的一種新型儲能元件,具有使用壽命長、可瞬間釋放大電流、重量輕、低溫特性好、工作溫度范圍寬及環保等特點,已經在電動汽車、風力發電、太陽能光伏產品、汽車電子、智能儀表、工業UPS電源、航空等重多領域得到了應用。尤其在電動車及混合電動車領域,采用電池與超級電容共用的復合電源,可明顯提高電動車及混合動力車的啟動性能[2]、加速性能、低溫性能,同時還可在制動時回收能量,安全性及可靠性能高,避免和緩解了單一使用電池所帶來的問題,已越來越多的被電動車及混合動力車生產商所采用。
電動汽車的發展受到諸如電池壽命,車輛加速性能等電池技術的限制。如何解決與電池使用相關的問題已經成為電動汽車推廣和應用的最大瓶頸。加裝超級電容,并將超級電容與各類動力電池配合組成復合電源應用于各類電動車輛,是現有科技水平下可行的解決辦法之一。
電動汽車正常行駛期間電池所需的平均功率不高,但制動,加速和爬坡時的最大功率非常高。根據相關汽車研究部門的數據,當前開發的電動汽車的最高功率與平均功率之比達到16:1[3]。顯然,如果僅使用電池,則當車輛需要瞬時大功率時,電池的放電容量顯然不足,很容易造成電池損壞。當超級電容器與電池一起使用時,超級電容器可提供車輛在上坡或下坡時所需的瞬時大功率,避免了大電流對電池壽命致命影響的問題,除了提高車輛啟動和加速性能外,電池壽命也大大延長。
另外電動汽車在剎車過程中的能量回收也必須考慮,這樣可以降低能量消耗,減少充電次數,延長續駛里程,減少充電時對電網的沖擊。由于電池是通過化學反應充電的,因此需要較長時間,車輛制動時間短,能量回收效果不佳,混合超級電容器和電池后車輛正在制動。在過程中產生的反饋能量可以被超級電容器[4]迅速吸收。特別是在城市中行駛時,頻繁出現紅燈,車輛的起步速度和制動頻繁發生,并且單獨使用電池對電池壽命和電能使用效率具有重大影響。相關研究表明,如果能夠有效地恢復制動能量,在頻繁制動和啟動的城市道路上行駛可以使電動汽車的行駛里程延長10%~40%。
綜上所述,超級電容器和電池的使用簡單地解決了使用電池所面臨的問題,并具有以下優點:1)提高車輛的起步和加速性能。超級電容器可以立即釋放大電流,為加速電動汽車提供必要的能量保護;2)改善電池的工作條件并延長電池壽命。超級電容器的充電和放電特性使您可以平滑車輛電流的變化程度。它為蓄電池提供了相對良好的工作環境,并使電池在放電過程中處于相對穩定的階段,避免了電池的瞬時大電流充電和放電,并延長了電池壽命。3)超級電容器有助于提高電動汽車的冷啟動性能,具有-40至65°C的寬溫度范圍,克服了電池在低溫下難以操作的缺點,并解決了汽車在低溫下啟動的問題;4),可回收電動汽車的制動能量:超級電容器的內阻非常低,可以在短時間內用大電流充電,并且可以在頻繁的制動過程中回收車輛產生的能量,延伸。5)減少對電網的影響,提高充電質量:在電動汽車的充電過程中,超級電容器起到穩壓和濾波的作用,降低充電過程中的紋波系數,提高充電質量,保護電池。
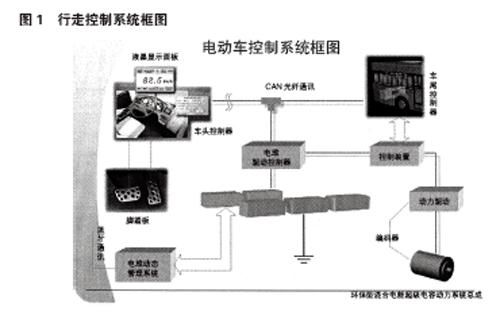
3 行走系統
3.1 車頭控制器
車頭控制器主要任務是完成人機交互,對腳踏板指令進行處理后,通過CAN光纖通訊將執行指令傳送給其他控制器;并通過CAN光纖通訊采集其他控制器和管理系統各方面的運行參數,顯示在面板上,方便讀取。其液晶顯示面板采用7英寸彩色顯示屏,顯示內容分別是鋰電池總電壓總電流、牽引電機電流、故障代碼、車輛時速、運行狀態、行駛總里程數等。主顯示畫面如圖2所示。
3.2 車尾控制器
1)動態操控的實現
車尾控制器對操作指令進行解析,然后向驅動系統發出驅動指令,根據電堆的狀態和車輛的瞬間過程,給予驅動裝置一個運動訊息,從而使車輛運動或制動。
2)能量回收算法的實現
具有能量回收功能是本系統的特征之一。當整車在運動過程中接到需要制動的指令時,車輛能夠依照內嵌的算法給出能量回饋的訊息,將動能在瞬間完成向電能的轉換,并且完成向超級電容和動力鋰電池組的充電。回收能量的瞬間大小將取決于車輛的動態情況和超級電容及鋰電池組能量狀態。
3)動力驅動控制
動力驅動控制是一個將電能直接轉化成動能的過程,車尾控制器在邏輯上向驅動系統及控制裝置發送指令,并實現動力驅動的平穩運行指標。
3.3 控制裝置
控制裝置實現動力強電與控制弱電接口的過渡,完成車尾控制器執行指令的相關動作。
3.4 動力驅動部分
動力驅動部分是直接完成調速控制的裝置。電動機完全依照該驅動裝置所給出的電壓、頻率訊息進行運動,同時又完成將電能與機械運動進行交互的過程。該裝置既是整車動能的驅動裝置,又是一個電制動剎車能量轉換裝置。
3.5 運動電機
電動機是車輛運行的動力部分,從驅動器接收電動機旋轉命令,在此期間,電動機通常會更改扭矩控制和速度控制模式。
電機的旋轉部分通過機械速度編碼器反饋到驅動單元,因此驅動系統以閉環控制模式運行。轉矩和速度的閉環控制模式使行駛中的車輛穩定舒適。
3.6 電堆驅動控制器
電堆驅動控制器用于對超級電容和動力型鋰電池兩種能量載體的能量輸出切換和互補輸出。在車輛啟動或制動過程中,將由超級電容擔負著能量載體,當車輛進入平穩運動時,超級電容和動力鋰電池之間的能量又能通過電堆驅動控制器進行平衡。電堆驅動控制器的主要作用是將動力鋰電池與超級電容實現動態切換。
3.7 電堆動態管理系統
車輛動力鋰電池和超級電容器的每個單元必須執行動態監視和管理,管理信息必須發送回車輛的驅動系統,以指導驅動控制器的驅動操作模式。
1)超級電容平衡控制系統
在模塊組合的超級電容中具有自平衡裝置,當超級電容在運行中,某個單體達到上限值時,該平衡裝置會將其的能量進行自動平衡,以使所有的單體能量趨于一致。
2)動力鋰電池管理系統
管理系統監視和管理動力鋰電池每個單元的參數,并將監視參數傳輸到車輛驅動系統,以指導驅動過程的能量輸出控制。
3.8 藍牙信息傳送裝置
電堆的充電過程必須實現全程的監控,必須依照動力鋰電池組的參數特征進行控制。藍牙信息傳送的過程就能實現這個目標,在充電過程中,地面充電站的充電過程的參數給出必須嚴格按照鋰電池的參數進行,電堆動態管理系統對其進行全程監控。
4 結論
本研究是在產品樣車的基礎上,通過實測得出的結果,設計的原則符合國家對車輛的強制性標準和法規,經過分析可得出如下結論:
(1)基本提供了在原有基礎上開發混合動力超級電容器環衛專用車的技術基礎;
(2)混合動力超級電容環衛專用車輛已通過測試,與能耗相比價格差異較大的車型具有明顯的經濟優勢。與電動汽車價格差異較大的車型相比,低能耗(每日能耗)和總體經濟效益較為明顯。
(3)混合超級電容器和環衛專用車輛通過節約能源,減少環境污染,減少對環境治理的投資并減少了對傳統能源渠道的保護,對整個國民經濟具有極大的幫助[5]。
(4)增加電容器的充電量不僅會降低使用成本,而且還能保持電網的平衡。
(5)電池工業化和大規模發展的進步將繼續改善電池的一致性,可靠性和安全性,并充分體現出用于環衛專用車輛的混合電動超級電容器的經濟和社會效益[6,7]。
因此,發展混合電能在城市中的特殊應用具有巨大的社會和經濟優勢,可以在城市運營和管理領域積極推廣和應用。
參考文獻:
[1]吳孟強,張緒禮,高能武,等.電化學超級電容器-科學原理及技術應用[M].北京:化學工業出版社,2005.
[2]陳永真,寧武,孟麗囡,等.超級電容改善汽車啟動性能[J]. 今日電子, 2004(5):106-107.
[3]崔淑梅,張千帆,宋立偉,等. 超級電容電動車動力性能的研究[J].微電機,2005(4):38-41.
[4]李珂,張承慧,崔納新.電動汽車用高效回饋制動控制策略[J].電機與控制學報,2008(3):324-330.
[5]陳清泉.環境保護和電動車的開發[J].江蘇機械制造與自動化,2000(1):3-7.
[6]王靜.電動車發展現狀及前景分析[J].汽車運用,2000(7):13-14.
[7]崔淑梅,段甫毅.超級電容電動汽車的研究進展與趨勢[J].汽車研究與開發, 2005(6): 35-40.
