BP 神經(jīng)網(wǎng)絡(luò)與Sugeno 模糊積分融合 的轉(zhuǎn)子系統(tǒng)故障診斷
2019-11-18 08:09:54田富國汪慶華賈康鄧東花
裝備環(huán)境工程 2019年10期
田富國,汪慶華,賈康,鄧東花
(1.西安工業(yè)大學(xué) 機(jī)電工程學(xué)院,西安 710021; 2.中國石油天然氣管道工程有限公司 儀表自動化室,山東 廊坊 065000)
轉(zhuǎn)子是旋轉(zhuǎn)機(jī)械設(shè)備故障的高發(fā)部位,對轉(zhuǎn)子故障的研究在科研領(lǐng)域占有核心地位[1]。BP 神經(jīng)網(wǎng)絡(luò)自其出現(xiàn)以來,在故障識別方面受到廣大學(xué)者的青睞,BP 神經(jīng)網(wǎng)絡(luò)以及其基礎(chǔ)上的改進(jìn)方法屢見不鮮[2-4],采用BP 神經(jīng)網(wǎng)絡(luò)在軸心軌跡特征識別中也廣泛使用[5-6]。然而由于其算法缺陷,BP 神經(jīng)網(wǎng)絡(luò)在識別方面難以達(dá)到高準(zhǔn)確度的識別。Sugeno 模糊積分自日本學(xué)者Sugeno 教授[7]在他的博士論文中提出以來,在特征識別領(lǐng)域已經(jīng)十分普遍[8]。一些研究者將Sugeno 模糊積分用于多分類器信息融合之上,取得良好成果[9-10]。
文中提出在獲取故障類型軸心軌跡不變矩特征的基礎(chǔ)上,將BP 神經(jīng)網(wǎng)絡(luò)作為分類器與Sugeno 模糊積分相結(jié)合解決分類問題,以較少的樣本獲得較高的類型識別率,以避免BP 神經(jīng)網(wǎng)絡(luò)的缺陷。同時,建立模型應(yīng)用于對轉(zhuǎn)子軸承系統(tǒng)不同故障特征的辨識中,取得了優(yōu)異的效果。
1 軸心軌跡圖像不變矩法特征提取
軸心軌跡在轉(zhuǎn)子軸承系統(tǒng)故障的識別上應(yīng)用相對廣泛。文中采用形狀不變矩的計算,提取軸心軌跡的特征向量。圖像識別不變矩是Hu 在1962 年提出的[11],根據(jù)其研究成果,將二階矩與三階矩導(dǎo)出7個不變矩,圖形的重心、面積、慣性矩都可以用這7個不變矩來表示。具體計算如下所述。
式中:λ 為圖形的灰度;mpq稱為λ 階正則矩,并且集合{mpq}由 h μ∫ ? 唯一確定,同樣,μ 也可由集合{mpq}唯一確定。
針對離散圖形,可將式(1)簡化為離散形式:

可以將軸心軌跡轉(zhuǎn)化為二值圖像,認(rèn)為2R 平面上軸心軌跡經(jīng)過的區(qū)域坐標(biāo)點(diǎn)的灰度值相同,即相反,未經(jīng)過的區(qū)域灰度值為0,故可將式(2)進(jìn)一步簡化為:

由于其平移不變性,即mpq與圖像在坐標(biāo)中的位置有關(guān),但是圖像的坐標(biāo)位置與圖像的中心距無關(guān),所以將 ( , )x yρ 平移到中心,平移的不變性就能得到滿足。因此,定義p q+ 階矩的中心矩為:

式中,x0=m10/m00,y0=m01/m00,表示圖像區(qū)域的灰度重心坐標(biāo)。
為了使式(4)具備伸縮的不變性,對其進(jìn)行標(biāo)準(zhǔn)化處理:

為了使矩特征pqI 滿足旋轉(zhuǎn)不變性,Hu 利用式(5)推導(dǎo)出了7 個不變矩集合1φ —7φ :
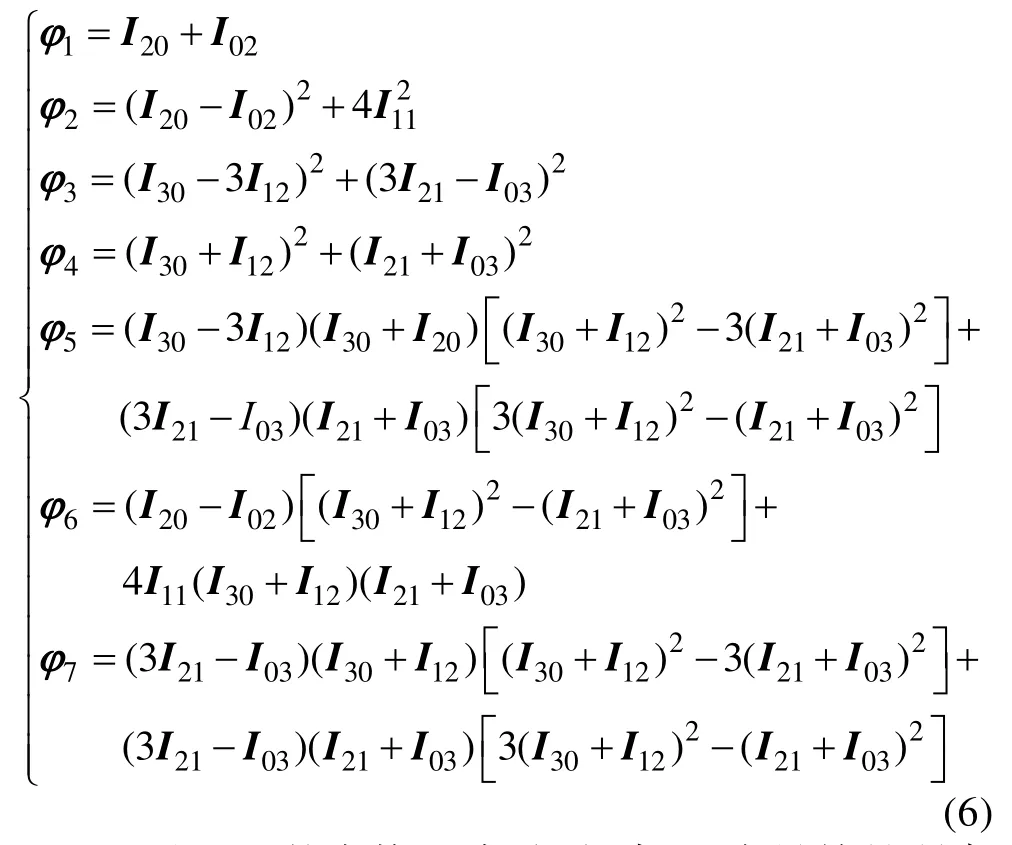
通過上面的變換,式(6)中7 個量就是所求特征。
2 BP 神經(jīng)網(wǎng)絡(luò)與Sugeno 模糊積分融合算法
該算法是通過不同的屬性組合構(gòu)造BP 神經(jīng)網(wǎng)絡(luò)分類器對樣本類別進(jìn)行分類,之后利用Sugeno 模糊積分對每個分類器的結(jié)果進(jìn)行融合的一種融合識別算法。其流程如圖1 所示,具體過程如下所述。
1)選取特征樣本,將樣本分成兩部分:一部分用于訓(xùn)練;一部分用于測試。為了使分類器具備良好的性能,訓(xùn)練樣本要多于測試樣本。
2)構(gòu)造3 個神經(jīng)網(wǎng)絡(luò)分類器,每個分類器對每一類測試樣本會對應(yīng)一個識別率。假設(shè)有3 種類別,那么識別率的個數(shù)就為9,識別率為各網(wǎng)絡(luò)輸出的置信度,將用它來計算模糊密度進(jìn)而算出模糊測度。
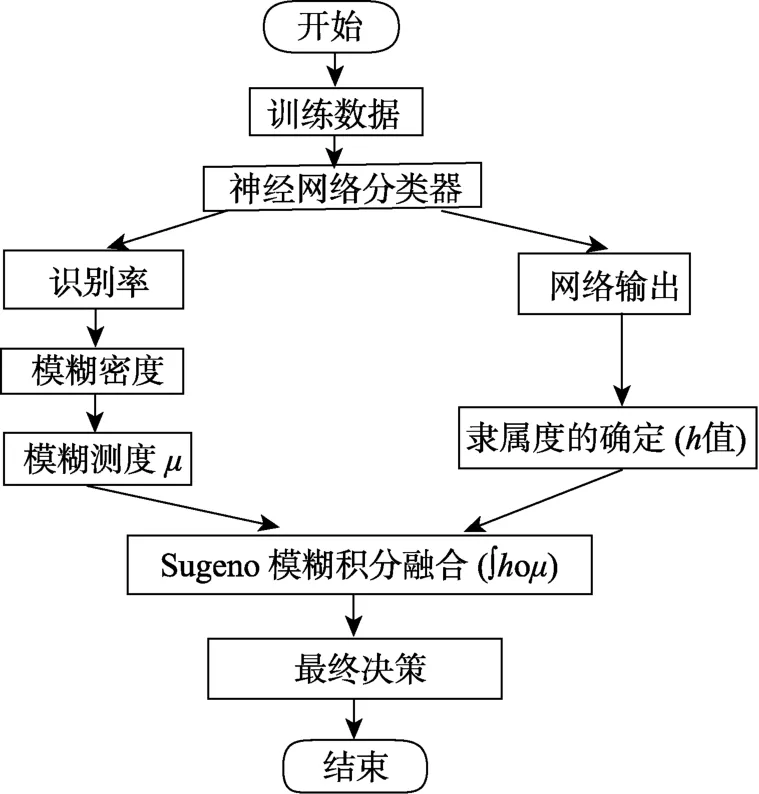
圖1 算法融合模型流程

其中系數(shù)λ 稱為λ 律,ig 為模糊密度,λ 能夠由式(8)得出:

3)BP 神經(jīng)網(wǎng)絡(luò)對每一個測試樣本都會有一個實(shí)際的輸出,這個輸出值即為隸屬度。一般BP 神經(jīng)網(wǎng)絡(luò)分類器通過這個輸出值會對輸入的樣本進(jìn)行一個決策,這也是它作為分類器的原理。
4)將隸屬度與模糊測度進(jìn)行取小、取大操作,得到最后的融合結(jié)果。
3 轉(zhuǎn)子系統(tǒng)故障診斷模型
轉(zhuǎn)子故障診斷的步驟通常為故障信號采集、故障 特征提取、狀態(tài)識別。轉(zhuǎn)子故障診斷模型如圖2 所示。矩特征表示轉(zhuǎn)子在故障狀態(tài)下取其軸心軌跡圖像平移、伸縮、旋轉(zhuǎn)后的7 個矩特征。利用3 個BP 神經(jīng)網(wǎng)絡(luò)選取6 個特征構(gòu)建轉(zhuǎn)子故障診斷模型,然后利用Sugeno 模糊積分對每個分類器的模糊測度和分類器對網(wǎng)絡(luò)輸出結(jié)果進(jìn)行融合,最終做出最后決策。獲取故障特征參數(shù)為模型的輸入信號,模型最終獲得6 種狀態(tài)結(jié)果,即正常情況、轉(zhuǎn)子不對中情況、轉(zhuǎn)子不對中+不平衡情況、動靜件碰磨情況、油膜渦動情況、油膜震蕩情況。
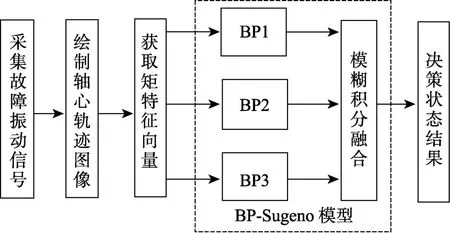
圖2 轉(zhuǎn)子故障診斷模型
4 實(shí)驗驗證及分析
為了驗證上述應(yīng)用方法對轉(zhuǎn)子軸承系統(tǒng)故障的有效性,采用了機(jī)械故障仿真模擬實(shí)驗平臺(MFS- MG)模擬了不同狀態(tài)下的機(jī)械故障,采用motor 軟件設(shè)置電機(jī)轉(zhuǎn)速在油膜故障中為60 Hz,其他故障為30 Hz,采樣頻率為2560 Hz。同時,利用VQ 軟件獲取其對應(yīng)信號軸心軌跡圖像,如圖3 所示。通過利用matlab2012a 軟件編寫不變距特征提取程序,將實(shí)驗截取的不同故障的軸心軌跡圖分別求得原圖、旋轉(zhuǎn)270°、旋轉(zhuǎn)90°、1/2 尺寸和2 倍尺寸五種變化方式下的特征矩,每種狀態(tài)下提取公式(6)中所示的7 個特征矩,同一個軸心軌跡共計可得到35 個特征樣本。提取的特征數(shù)據(jù)見表1,由于數(shù)據(jù)量大此處只顯示 部分?jǐn)?shù)據(jù)。
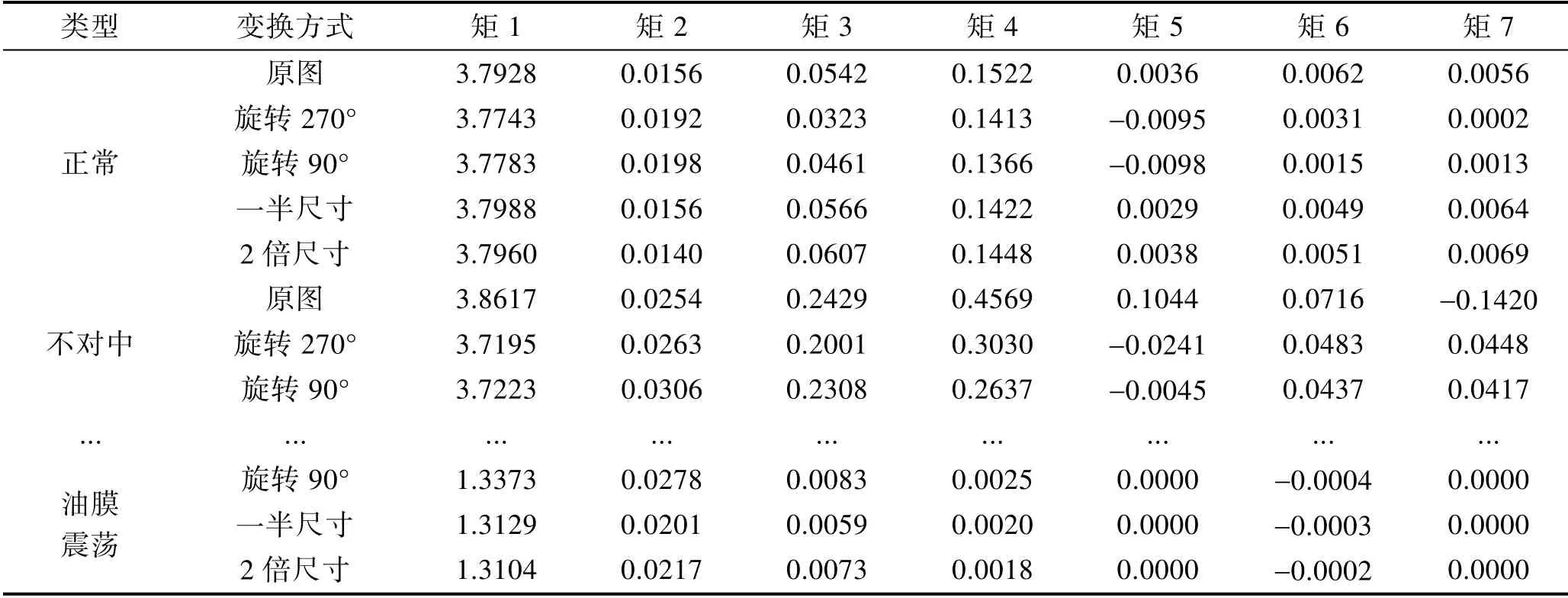
表1 軸心軌跡不變矩特征數(shù)據(jù)
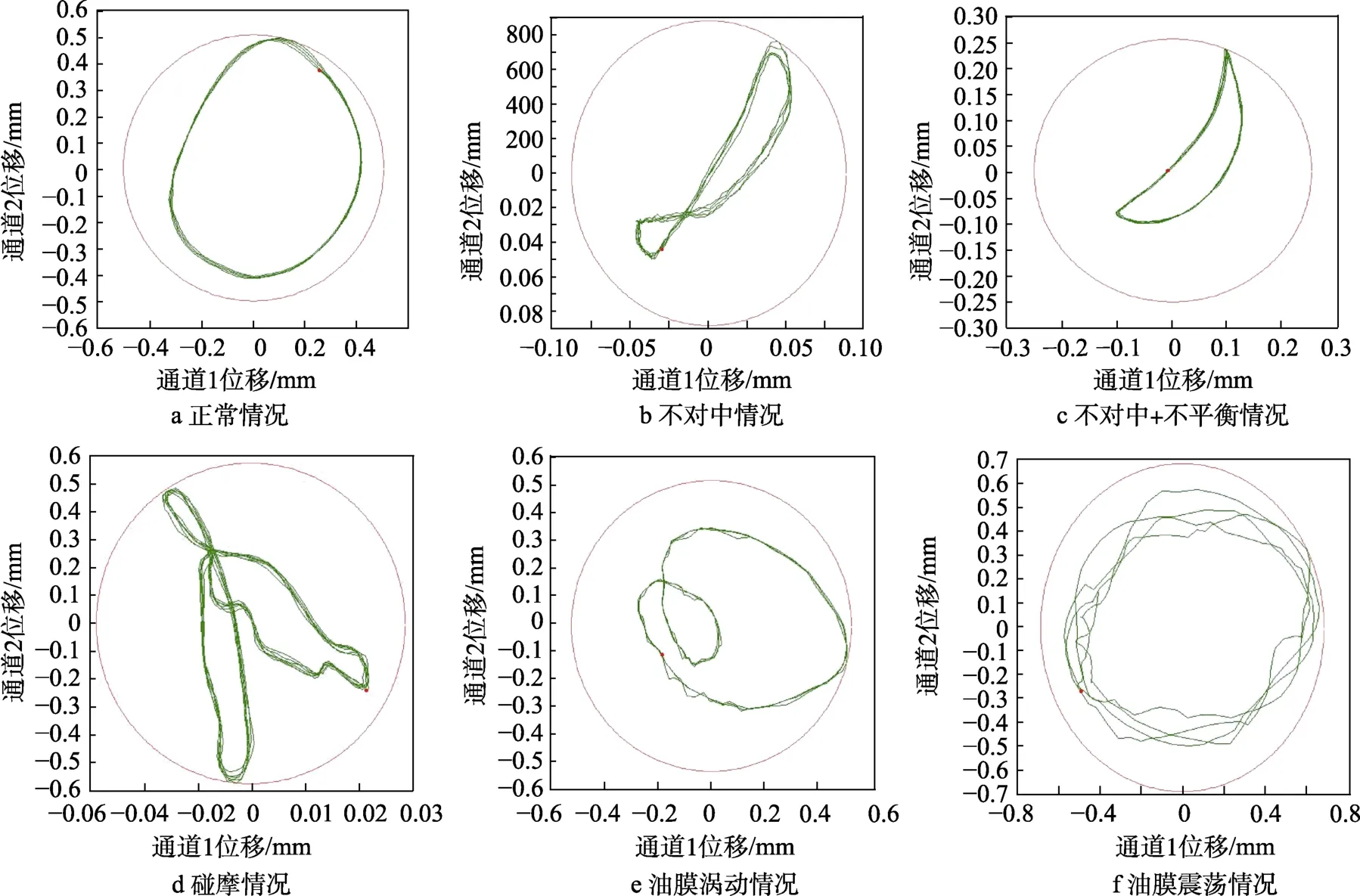
圖3 不同故障下的軸心軌跡圖像
為了規(guī)范數(shù)據(jù),采用0 均值標(biāo)準(zhǔn)化對數(shù)據(jù)進(jìn)行歸一化處理。同時,選擇將每6 個特征為一組,分成3組特征集,不同特征值組合是為了增加模型的不穩(wěn)定性,構(gòu)造的三個BP 分類器見表2。

表2 構(gòu)造的三個BP 分類器
利用MATLAB 神經(jīng)網(wǎng)絡(luò)工具箱功能對樣本進(jìn)行 訓(xùn)練測試,測試樣本的輸出結(jié)果作為BP 神經(jīng)網(wǎng)絡(luò)的初步?jīng)Q策,每一種類型對于每一個分類器的識別率可作為模糊密度,計算其模糊測度,6 種故障類型的λ值見表3。然后進(jìn)行融合,最終得融合前后的識別率見表4。
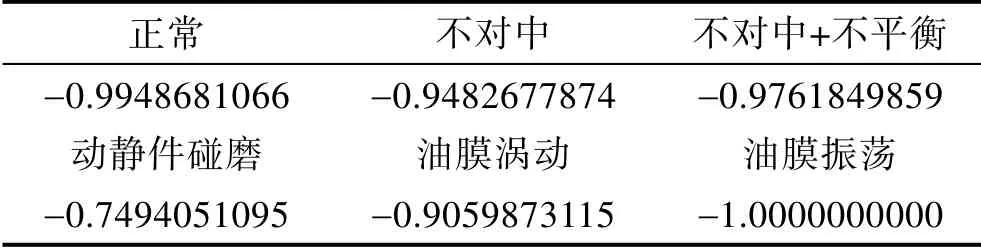
表3 6 種故障類型λ 的值
由表4 不難發(fā)現(xiàn),經(jīng)過融合后,6 種故障特征的識別率較融合前有了明顯的提高。雖然總樣本的識別率沒有單個故障類型的識別率高,但是經(jīng)過sugeno模糊積分融合后,識別率也有了明顯的提高。
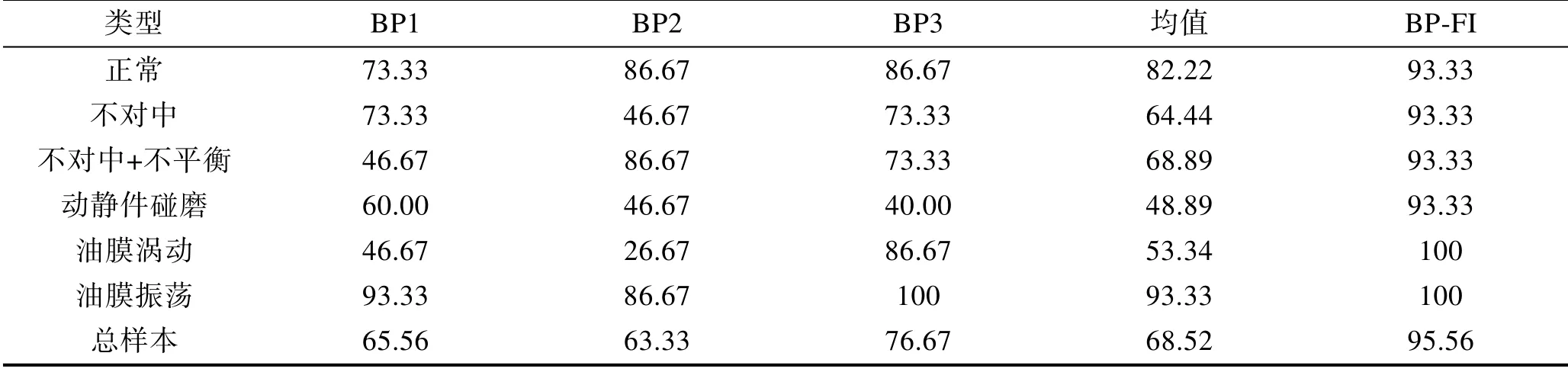
表4 融合前后識別結(jié)果對比 %
5 結(jié)語
研究了轉(zhuǎn)子軸承系統(tǒng)常見故障的診斷方法,充分利用軸心軌跡不變矩特征,提出了一種BP 神經(jīng)網(wǎng)絡(luò) 與Sugeno 模糊積分融合的轉(zhuǎn)子故障診斷模型。利用sugeno 模糊積分進(jìn)行決策,充分提高了單個BP 神經(jīng)網(wǎng)絡(luò)識別的缺陷,提高了故障診斷的效率和質(zhì)量。仿真實(shí)驗結(jié)果表明,多分類故障問題在BP 神經(jīng)網(wǎng)絡(luò)與sugeno 模糊積分融合之下,整體識別正確率都有所提高,診斷后結(jié)果驗證了模型的有效性、可行性,對轉(zhuǎn)子故障的監(jiān)測與維修有一定的意義。
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
