防水卷材柔性碼垛控制系統的設計
2019-11-22 23:58:32涂祟剛朱麗霞
科技風 2019年28期
涂祟剛 朱麗霞
摘要:設計一套以安川機器人和西門子PLC的柔性碼垛系統,通過人機界面的控制,能夠自動柔性的計算碼垛數量、碼垛方式和實時顯示當前的碼垛過程,成功應用于企業生產中,大大提高了設備的使用效率。
關鍵詞:柔性碼垛;工業機器人;人機界面;PLC
中圖分類號:TP273 ? ?文獻標識碼:A
防水卷材是用于隧道、建筑墻體以及屋面、公路等處,能夠防止地下水滲漏、抵御外界雨水。由于防水卷材的組成的材質和使用場所的不同,對于材質較硬的卷材可以選擇豎放,而對于材質較軟的卷材只能采取橫放,而且存在著多種卷材尺寸,而傳統的防水卷材碼垛設備只能進行一種卷材尺寸的立式碼垛,不能滿足現代企業生產的要求,今設計了一套能夠根據防水卷材自動調節碼垛數量、調節碼垛方式的柔性碼垛控制系統,大大提高了碼垛設備的柔性和碼垛效率。
1系統組成
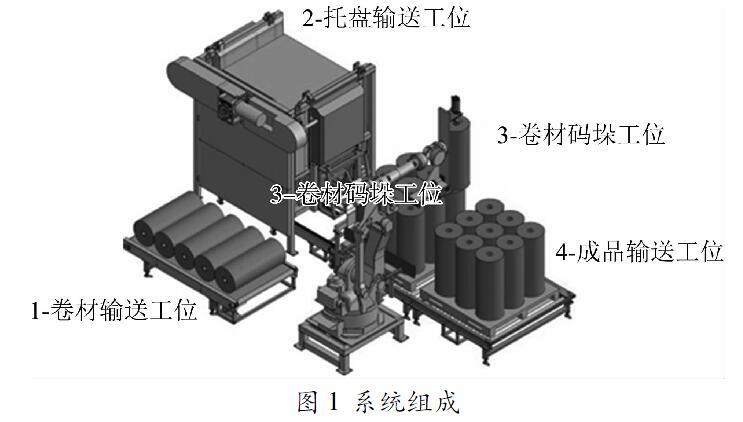
系統組成如圖1所示。系統分為四個工位,工位1是卷材輸送工位、工位2是托盤輸送工位、工位3是卷材碼垛工位、工位4是成品輸送工位。
2控制系統設計
2.1 控制方案
該控制方案在觸摸屏上可以設定產品的尺寸、重量等參數以及顯示碼盤上的個數,利用西門子1200 PLC為整個系統的控制器,它能夠實現場安全信號及報警、產品到位信號、托盤到位信號、機器人運行保護信號的控制,采用Profibus-DP總線和安川MS165工業機器人進行總線通訊,實時傳輸碼垛的方式和位置坐標。
2.2程序設計流程
在始狀態下,托盤輸送工位已經由叉車放滿空托盤,整個輸送線工位上沒有成品或空托盤,機器人處于初始位置,根據觸摸屏上設置此次放置的卷材的尺寸和放置方式,這時程序可以自動計算出托盤上卷材的放置數量和放置的位置。按下啟動按鈕,頂料氣缸會將托盤輸送工位的從倒數第二個托盤開始的所有托盤頂起,此時托盤輸送工位電機和卷材碼垛工位電機轉動,將最底層的空托盤順利輸送至卷材碼垛工位,此時如果卷材輸送工位上有卷材,工業機器人將按設定好的碼垛方式進行抓取碼垛,同時人機界面上會動畫實時顯示當前的碼垛情況,待一垛完成后,卷材碼垛工位和成品輸送工位電機同時轉動,將一垛成品卷材輸送至成品輸送工位,等待叉車將其運走,同時托盤輸送工位電機也轉動,送出下一個空托盤至卷材碼垛工位,周而復始。在托盤輸送工位無空托盤、機器人異常、成品輸送工位卷材在一定時間內未運走,都會發生報警,提示工作人員處理當前狀況。
2.3機器人的程序控制
工業機器人在整個控制系統中,主要是對卷材進行不同放置方式的碼垛,此時需要對工業機器人運動的位置進行計算和PLC之間進行數據的交換,通過對目標點的示教,創建了機器人碼垛的主程序和子程序,如下所示:
MAIN()! // 主程序
CALL JOB:INITIAL!//調用初始化子程序
WHILE(B002=1)!//等待啟動信號
CALL JOB:PICK!//調用拾取子程序
CALL JOB:PLACE IF
IN#(30)=ON!//調用位置計算子程序
CALL JOB:PLACE1 IF IN#(31)=ON!//調用豎直放置子程序
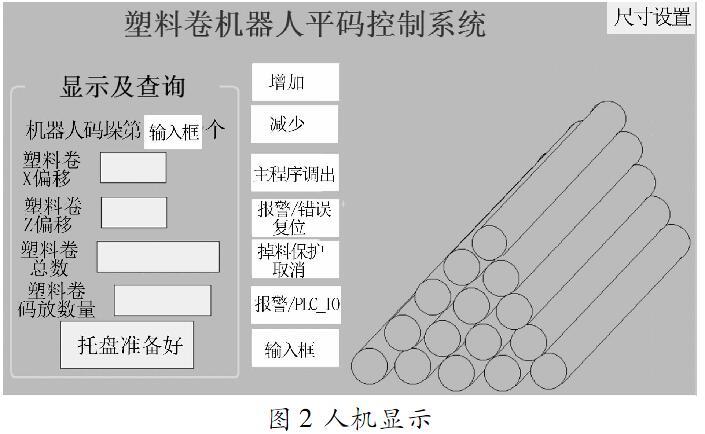
CALL JOB:PLACE2 IF IN#(32)=ON!//調用水平放置子程序2.4 人機界面設計
根據防水卷材不同材料,我們可以通過人機界面選擇放置的數量和放置的方式,人機顯示如圖2所示。
3 結語
本系統融合了多種現代控制技術,可以根據卷材的尺寸和重量,自動調整碼垛的數量,選擇豎直還是水平放置方式,并且可以實時的顯示當前碼垛的動畫。該系統運行穩定,具有一定的推廣價值。
參考文獻:
[1]傅剛輝,王睿,金波.高抗滲抗裂保護層在屋面抗滲中的應用[J].建筑技術,2018(06).
[2]程偉.基于西門子S7-1200控制器和松下A5伺服驅動器的碼垛機急停控制的研究[J].自動化應用,2017(12).
[3]賈帥,沈興全,肖勇.碼垛機器人直驅技術研究[J].組合機床與自動化加工技術,2014(08).
作者簡介:涂崇剛(1996-),男,江蘇徐州人,常州輕工職業學院學生,主要研究方向:電氣自動化;朱麗霞(1977-),女,江蘇常州人,副教授,常州輕工職業學院教師,主要研究方向:電子信息工程。