儀器維修遠程協助機器人的研發
2019-11-30 12:14:13潘潔張偉峰李露露肖攀
科技資訊 2019年25期
潘潔 張偉峰 李露露 肖攀
摘? 要:隨著地震臺站改革的不斷深入,中心地震臺模式的不斷推行,越來越多的臺站變成無人值守臺和遙測臺,全省幾十甚至幾百個臺站儀器的維護維修任務變得越來越艱巨,儀器網線松動、儀器死機等這些很小的故障就必須省局負責儀器維修的人員奔赴現場處理,浪費大量的人力和物力。而儀器遠程維修機器人能夠讓省局的儀器維修人員遠程查看儀器狀態,并且讓操作機器人進行簡單的維修操作和指導沒有儀器維修經驗的人配合完成維修,儀器維修遠程協助機器人的研發為臺站的儀器管理和維護能夠提供了一定的幫助。
關鍵詞:儀器維修? 遠程協助? 機器人
中圖分類號:TH76 ? ?文獻標識碼:A 文章編號:1672-3791(2019)09(a)-0007-02
Abstract: With the deepening of the reform of seismic stations and the continuous implementation of the model of central seismic stations, more and more stations have become unattended stations and telemetry stations. The maintenance tasks of tens or even hundreds of stations in the province are becoming more and more arduous, the network of instruments is loosened, the instruments are dead, and so on. These minor failures must be handled on the spot by the personnel responsible for the maintenance of instruments in the provincial bureau. With a lot of manpower and material resources, the remote maintenance robot of instrument can let the instrument maintenance personnel of Provincial Bureau view the instrument status remotely, and let the operation robot carry out simple maintenance operation and instruct those who have no experience in instrument maintenance to cooperate in completing the maintenance. The research and development of remote assistance robot of instrument maintenance can provide certain help for the instrument management and maintenance of the station.
Key Words: Instrument maintenance; Remote assistance; Robot
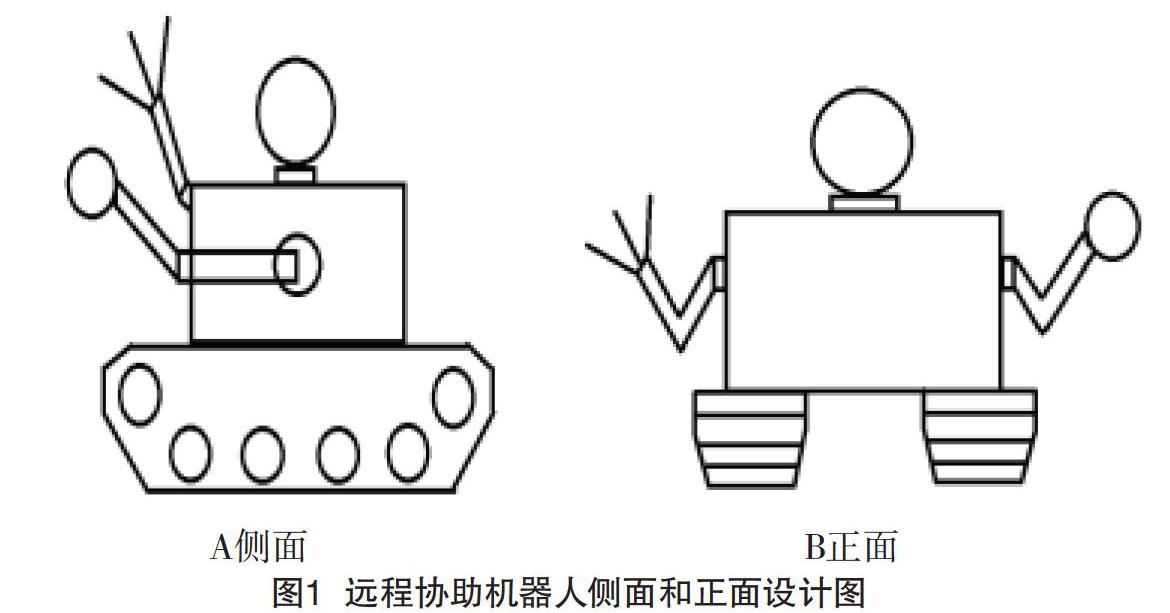
安徽省目前直屬的上百個有人和無人值守臺站,市縣臺站幾乎所有的儀器維修都是由省局的儀器維修室負責的,維修任務尤為艱巨,特別是在惡劣天氣和梅雨季節儀器故障的高發期。有時候僅僅是一個很小的問題,無人值守臺站和沒有一起維修經驗的市縣臺站無法解決,為了數據的連續率,省局的維修人員只能疲于奔命。為了解決這個難題,受目前市場上出現了能夠代替人完成各種工作的多種的機器人的啟發,研制出一款專門服務地震儀器維修服務的機器人。這款儀器維修遠程協助機器人主要有控制模塊、驅動模塊、傳感器模塊。機器人的控制模塊主要是操作系統通過網絡控制驅動模塊和傳感器模塊,驅動模塊能夠按照指令驅動機器人前進后退和轉彎。傳感器模塊主要分為語音可視模塊和機械模塊,并且能按照指令完成語音視頻對話和簡單的儀器重啟等工作。這款機器人應用到地震臺站的儀器維修有很多好處,首先這款機器人有針對性,造價不高,除了編程以外,硬件都可以選擇市場上比較成熟的產品,減少成本。另外這款機器人可以針對儀器故障進行簡單為維修,比如重啟操作、對松動的線路進行加固等,最重要的是可以通過這款機器人的視頻和語音對講系統指導沒有儀器維修經驗的人配合維修儀器,在很大程度上減少了省局儀器維修室人力和物力的浪費。
1? 遠程控制模塊的研發
針對臺站儀器的維修,這款機器人要通過網絡進行遠程控制和操作。遠程控制有控制端和受控方,控制端通過請求,取得對遠端受控方的操作。受控方通過網絡接收控制端發出的信息,并且向執行機構發出命令,驅動執行機構完成各種指令動作。控制端的軟件以安卓版的手機APP的方式進行開發,這樣更能方便儀器維修人員隨時隨地查看儀器狀態并且進行維修或者指導其他人員維修。
1.1 控制端實現遠程控制的程序設計
利用JAVA Socket編程,使控制端與被控端之間建立數據傳輸的數據流通道[1]。在控制端,實現對所有事件(Mouse、Key)的偵聽,將所有事件封裝在InputEvent類,并用對像輸出流ObjectOutputStream發送到遠端。同時,控制端為一個線程,不斷地執行run()方法,將接收到被控端的畫面數據(按遠端轉成字節數據的逆過程)轉成圖片,這些圖片用javax.io.ImagIO轉成一個字節數組,從而將每一個畫面的數據量大小,以及數據用數據輸出流往控制端發送,并在控制端顯示,從而為控制端發布下一個指令提供畫面支持。
1.2 受控方硬件平臺設計
受控方的硬件主要有履帶車驅動控制系統、遠程視頻系統、機器臂控制系統組成。選擇一款電路板進行編程,將各個系統聯系在一起做成一個完整的整體。
選擇一款ARM9處理器為核心的QQ2440V3開發板作為該遠程協助機器人的電路系統[2],由于該機器人需要對視頻不斷處理和傳輸,并且不斷接收信息和發布指令,所有需要大容量的內存和較高主頻的MCU,目前市場上流行的51單片機不符合要求[3]。采用免費的,源代碼開放的編碼。UC/OC-II具有結構小,執行效率高,可擴展性強的特點,能夠滿足基本需求。
2? 履帶車驅動系統設計
地震臺站所處的環境一般較為偏僻,道路狀況比較崎嶇不平,針對地震臺站的周圍環境,這款遠程協助機器人選擇履帶車作為移動平臺。但是有時候維修儀器要到觀測室內,為了保護觀測室內的地板,這款遠程協助機器人采用橡膠履帶車最為合適,因為橡膠履帶車具有噪音低、振動小、接地壓小,接地面大、穩定性好、對機房等室內外地面破壞小等特點。履帶車控制系統主要是選擇合適的電路板進行編程,控制履帶車前進后退和左右轉彎,動力方面采用48V的大功率電機作為驅動器,選擇市場上較為成熟的鋰電池作為電源,這種電池有容量大、體積小、重量輕的優點,很適合作為本款機器人。
3? 機器臂控制系統設計
由于地震臺站內的儀器大都是安裝在機柜內部,為了更好地查看儀器狀態和維修儀器,該款遠程協助機器人采用兩個機器臂的設計,這兩個機器臂各自能獨立上下前后移動,是兩個獨立的系統。一個機器臂安裝視頻攝像頭,因為我們地震臺站的設備大都是安裝在機柜上,僅僅靠機器人自身的一個攝像頭無法合理控制高度,并且無法把攝像頭靠近機柜內部的儀器查看儀器狀態,機器臂上安裝攝像頭可以完美解決這一難題。另一個機器臂安裝電筆等簡單維修工具,能夠依靠機器臂的移動完成儀器的重啟以及簡單的測量工作。
4? 遠程視頻系統設計
視頻系統是這款機器人的眼睛和嘴巴,機器人在接收控制方的信息后,發布指令給驅動器,控制機器人移動。控制方通過視頻攝像頭觀察機器人前進方面的路況,并且還能和現場儀器維修人員通話,知道現場人員進行儀器維修。攝像頭采用可編程的大視野工業攝像頭,選擇ARM9處理器為核心的QQ2440V3開發板進行編程,使攝像頭能夠上下前后移動,并能通過麥克風把現場聲音傳給控制方,并且本款攝像頭采用能夠允許多用戶登陸的攝像頭,方便維修人員在遇到障礙時,可以進行多用戶登陸查看故障儀器,進行專家會診。
5? 結語
儀器維修遠程協助機器人能夠使省局儀器維修人員實時遠程查看儀器運行狀態,能夠遠程啟停儀器,并且能夠通過機器人對故障儀器進行簡單的維修和指導沒有儀器維修經驗的現場人員進行儀器維修工作,并且在某一維修人員無法維修的時候,采用專家會診方式查找故障,指導現場人員完成儀器維修工作。該機器人的研發能夠為儀器維修工作節約大量人力和物力,并且在儀器發生故障的時候,第一時間進行響應,保障地震監測數據的連續性和完整性,為地震臺站的儀器管理和維護能夠提供了很大的幫助。
參考文獻
[1] 姚曉芳,舒小松.基于Java socket網絡編程的基礎性應用研究[J].無線互聯科技,2017(22):32-33.
[2] 史水娥,楊豪強.基于arm9處理器的機房環境遠程監測系統設計[J].河南師范大學學報:自然科學版,2010(3):57-59,178.
[3] 楊威,艾銅青.GPRS遠程監控系統及其軟件編程分析[J].電腦知識與技術,2010(17):4690-4691.
