無人機飛行安全性分析
2019-12-17 08:45:36呂曉林中國人民解放軍92419部隊遼寧省興城市125106
無人機 2019年10期
呂曉林/中國人民解放軍92419 部隊,遼寧省 興城市 125106
研究了無人機的安全概率計算模型,將飛行任務分為發(fā)射起飛、飛行與回收三個階段,對各階段的安全性進行計算,分析了無人機飛行航路設計和飛行航區(qū)設置對安全概率的影響,并提出了有利于飛行安全性的航路和航區(qū)設置原則。
某型無人機采用火箭助推起飛,程序控制爬升到預定安全高度后,按照預定航線自主導航飛行,完成飛行任務后,按照預定回收區(qū)域進行自主回收。由于無人機飛行速度快、航程遠,飛行航區(qū)覆蓋面廣,航區(qū)內(nèi)既有陸上重要設施、人口密集區(qū),還有海上重要保護目標、重要生產(chǎn)生活設施等,需要對其飛行安全性進行分析和計算,探索安全使用方法和途徑。
無人機基本情況
無人機系統(tǒng)包括發(fā)射分系統(tǒng)、無人機(機體、發(fā)動機、導航控制分系統(tǒng)、電氣分系統(tǒng))和測控分系統(tǒng)。
無人機具備程序控制、自主和遙控三種飛行控制模式,同時具備自主安全控制功能。在飛行控制系統(tǒng)中,采取了以下安全措施:
(1)機載兩套衛(wèi)星導航定位設備,兩者互為備份;
(2)采用衛(wèi)星導航定位系統(tǒng)輸出的高度H與,通過高度穩(wěn)定回路操縱升降舵,完成飛行高度的穩(wěn)定與操縱;同時大氣機測定的高度H與作為備份;
(3)以衛(wèi)星導航定位系統(tǒng)輸出的航跡角為主進行導航控制,以磁航向作為備份。
無人機具有自主安全控制功能。起飛前可裝訂安全控制區(qū)域,安全控制系統(tǒng)實時判斷無人機位置,如果連續(xù)判斷無人機在安全控制區(qū)域外,則無人機執(zhí)行安安全控制措施。
飛行安全性分析
飛行基本過程
無人機通電測試合格后,發(fā)動機開車,油門推到最大,轉速穩(wěn)定后,助推器點火,無人機起飛后按預定程序爬升,爬升結束后以自主飛行為主,遙控為輔。自主飛行中,以機載的衛(wèi)星導航定位系統(tǒng)進行定位,并與給定航路進行比較,從而完成飛行任務。在自主飛行過程中,可以由地面站發(fā)送“人工引導”指令,進入遙控飛行模式。飛行結束后,無人機自主飛到預定區(qū)域進行回收。
可靠性分析
(1)發(fā)射段可靠性分析
在完成所有檢測程序后,先啟動發(fā)動機置慢車狀態(tài),并按照發(fā)射時的環(huán)境溫度、海拔高度將發(fā)動機的轉速推至修正額定狀態(tài);然后再點燃火箭助推器,當火箭助推器的推力值達到一定時,閉鎖機構的中的拉斷螺栓被拉斷,無人機離開發(fā)射車軌道。當火箭助推器工作結束后,自行脫落。無人機發(fā)動機轉速由修正額定狀態(tài)轉換至額定狀態(tài),以滿足無人機正常飛行需要。
無人機發(fā)射可靠性模型如圖1所示。
發(fā)射可靠性為R發(fā)射=R動力×R點火×R火箭×R火箭。
(2)飛行可靠性分析
無人機起飛后,進入程序爬高,然后可以遙控或自主飛行。若遙控失效,自動按供靶航路自主導航控制飛行。若GPS失效,則進行航路外推并轉遙控;若GPS和遙控都失效,無人機自主飛行到預先設置的墜毀區(qū)域墜落,以確保重要設施和目標的安全。
無人機可通過遙控鏈路接收遙控指令、航路和航點等信息;通過遙測鏈路發(fā)送GPS數(shù)據(jù)、無人機飛行狀態(tài)參數(shù)、遙控回令和無人機當前模式等信息。
無人機飛行可靠性模型如圖2所示。

圖1 發(fā)射可靠性模型

圖2 飛行可靠性模型
飛行可靠性為R飛行=R機體×R動力×R電氣×R飛控×[1-(1-R遙控飛行)×(1×R自主飛行)]×R指揮通信。
(3)回收可靠性分析
在飛行結束后,人工遙控或自主飛行到預定回收區(qū)進行回收,回收可靠性為R回收。
綜上所述,無人機飛行任務可靠性R=R發(fā)射×R飛行×R回收。
故障模式與危險概率
故障模式危害性分析概述
無人機飛行過程中,產(chǎn)生的危險主要包括:無人機或火箭助推器的落點在禁區(qū)以外,造成人員或設備等的損害。
具體包括:
(1)發(fā)射段中無人機和火箭助推器意外墜毀后,落點超出發(fā)射禁區(qū);
(2)飛行中,無人機墜毀;
(3)回收時,無人機墜毀。
上述危險均可能造成人員傷亡、設備損壞、財產(chǎn)損失等事故。
根據(jù)相關的國軍標,將故障嚴重性等級分成4級,如表1所示。

表1 故障嚴重性等級
根據(jù)相關國軍標,將故障可能性等級分為5級:A、B、C、D和E,如表2所示。故障可能性等級即該故障模式在總的故障中發(fā)生的比例。

表2 故障可能性等級
故障模式與危險概率
(1)發(fā)射段危險概率
無人機發(fā)動機在正常使用壽命之內(nèi)使用,其可靠度R動力可視為1。
點火控制系統(tǒng)的R點火可靠度視為1。
由于根據(jù)以往的經(jīng)驗,發(fā)動機和點火控制系統(tǒng)的可靠性可以看成1,那么發(fā)射段的可靠性主要由火箭助推器的可靠度R火箭決定,根據(jù)火箭助推器的生產(chǎn)工藝過程和使用方式分析,火箭助推器的故障主要考慮為沒有產(chǎn)生額定的推力值,并且主要應表現(xiàn)為沒有被點燃。基于這樣的假設,可以將火箭助推器視為成敗型產(chǎn)品。在發(fā)射段中,如果兩枚火箭只有一枚點燃,那么就會產(chǎn)生危險。如下表所示,可以看出,發(fā)生危險的概率為:2R火箭×(1-R火箭)。
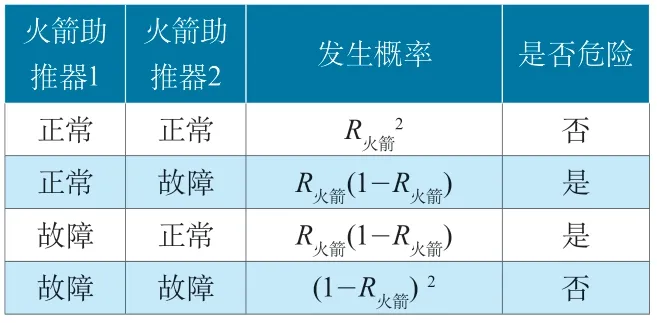
表3 發(fā)射段故障狀態(tài)表
下面計算火箭助推器的可靠度R火箭。
根據(jù)火箭助推器的生產(chǎn)單位航天二員同類產(chǎn)品的統(tǒng)計數(shù)據(jù),同類產(chǎn)品的試驗次數(shù)n=50,失敗次數(shù)f=0。現(xiàn)在對火箭助推器的單側置信下限RL進行估計。由于f=0,因此,計算公式為

其中,γ為置信水平。
現(xiàn)取置信水平為80%,那么RL=0.9701,則發(fā)射段任務成功的概率估計為:P發(fā)射=0.9701×0.9701=0.9411,單發(fā)火箭助推的概率估計為:2×0.9701×(1-0.9701)=0.0580,則發(fā)射段的危險概率為0.0580。
(2)飛行段危險概率
在飛行供靶段中,飛行時間按照t=1h來計算,則:
無人機的機體、動力系統(tǒng)和電氣系統(tǒng)的可靠度R機體=R動力=R電氣=1。
指揮通信設備的可靠度R指揮=0.9990。
無人機飛控系統(tǒng)的任務可靠度R飛控=0.9864。
自主飛行控制系統(tǒng)任務可靠度R自主=0.9996。
綜上,無人機飛行段的任務可靠度為R=0.9864×(1-(1-0.9967)×(1-0.9996))×0.9990=0.9854。
現(xiàn)假設上述各分系統(tǒng)出現(xiàn)故障的概率相互獨立,則可以計算出各種故障組合狀態(tài)對應的發(fā)生概率如表4所示(其中,1表示正常,0表示故障)。
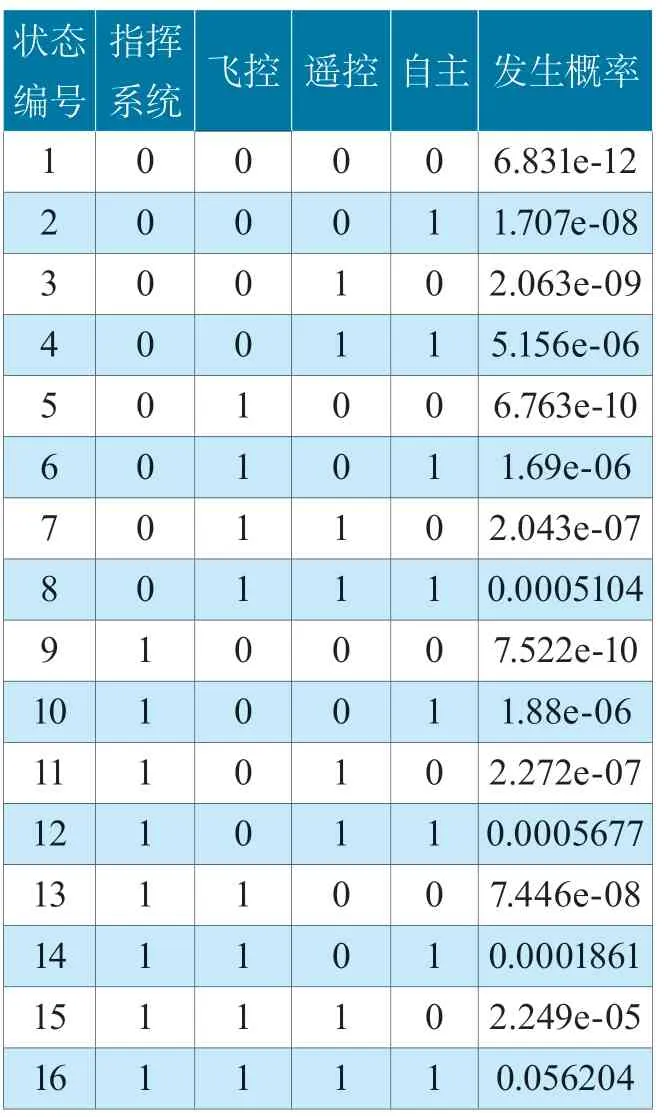
表4 故障狀態(tài)發(fā)生概率表
現(xiàn)對表中的狀態(tài)模式的發(fā)生概率與10-4進行比較,結果如表5。
由表中可見模式8、12、14、16共計4種模式的發(fā)生概率是大于10-4的。

表5 故障狀態(tài)發(fā)生概率表
安全性分析
發(fā)射段安全性分析
無人機采用雙發(fā)火箭助推零長發(fā)射方式,影響無人機發(fā)射安全的因素有:雙發(fā)火箭點火不同步、雙方火箭推力不同步、只有1枚火箭工作、發(fā)動機停車、無人機飛控系統(tǒng)故障、無人機電氣系統(tǒng)斷電。
助推火箭出廠前進行了雙發(fā)火箭同步點火試驗,確保雙發(fā)火箭同步點火時間偏差、火箭推力偏差和拖尾段起始時間偏差滿足指標要求。無人機放飛前,兩枚火箭點火電纜處于并聯(lián)狀態(tài),通過開關連接在點火電源上;在點火前要進行線路測試,確保點火電路無斷路、短路現(xiàn)象,在技術上和措施上確保雙發(fā)火箭點火的同步性。如果雙方火箭推力存在一定偏差,會對無人機產(chǎn)生一定的擾動,可導致無人機航向最大偏差范圍為±15°,這以后無人機會在飛控系統(tǒng)的作用下迅速糾偏,無人機不會繼續(xù)發(fā)生偏航運動。
助推火箭內(nèi)部點火線路上安置有低通濾波器,可以防靜電防射頻,確保火箭不會意外點火;另外每發(fā)火箭內(nèi)部都有兩套點火系統(tǒng),只要有一套系統(tǒng)工作,火箭就可以正常點火;同時點火前要進行點火線路檢測,確保兩枚火箭點火正常。當只有1枚火箭工作時,無人機會翻滾、失控墜毀,不會對發(fā)射禁區(qū)外的目標造成威脅。
火箭點火以后,如果發(fā)動機突然停車,火箭推力產(chǎn)生低頭力矩,無人機會快速墜入海中,不會對發(fā)射禁區(qū)外的目標造成威脅。
飛控系統(tǒng)出現(xiàn)機械故障的可能性很小,發(fā)射過程中,若舵系統(tǒng)出現(xiàn)問題,如舵面拉桿斷裂,無人機會很快失控墜海;如果飛控計算機、陀螺平臺、舵機出現(xiàn)問題,無人機會很快失控墜海,都不會威脅到發(fā)射禁區(qū)外目標的安全。
如果無人機電氣系統(tǒng)突然斷電,無人機馬上失控、快速墜落,也不會對發(fā)射禁區(qū)外的目標造成威脅。

圖3 無人機飛行時安全性分析框圖
因此,在發(fā)射段無人機不會對發(fā)射禁區(qū)外目標造成威脅。
飛行過程中安全性分析
程序爬高結束后,如果沒有遙控指令,無人機自動進入自主飛行,按預定航路進行飛行飛行。無人機飛行安全性分析如圖3所示。
各種因素影響
根據(jù)上述計算,對無人機飛行安全性的影響因素進行了分析。
火箭助推器
無人機安全是指在無人機的運輸、貯存、使用維護、發(fā)射和飛行等過程中不會對人員、財產(chǎn)、裝備等造成損害;在無人機發(fā)射后,無論飛行是否成功,最后的落點(包括助推器)應在禁區(qū)和危險區(qū)內(nèi)部。那么飛行的安全概率必須大于0.998(不考慮無人機被擊中后的情況)。根據(jù)上述的計算可知,飛行的安全概率小于0.998的任務可靠度,必須提高各方面的可靠性。
在不考慮回收段危險概率的條件下,飛行安全大于0.998,那么應保證單發(fā)火箭助推器的可靠度大于0.9995。
飛行時間
由于系統(tǒng)中的許多設備都是電子設備,其可靠性服從指數(shù)分布,航時越長,可靠性越低。設總航時分別為t1和t2,則同一個設備的故障概率在不同航時條件下的比值為,可見,飛行一個航次與兩個航次的飛行故障概率是不同的。但由于航時是根據(jù)任務要求確定的,一般難以壓縮,只能是在滿足需要的前提下,盡量減少總航時。
最遠飛行距離
由于存在各種干擾因素,遙控遙測實際作用距離要小于理論值。一般說來,各種設備在使用中以使用其最大范圍的2/3之內(nèi)為宜,以保證設備的性能和可靠性。因此,建議最遠飛行距離應不超過遙控遙測作用距離理論值的2/3。
航區(qū)內(nèi)重要目標范圍
從分析中可以看出,航區(qū)內(nèi)重要目標的范圍越大,越容易發(fā)生危險,所以在航區(qū)內(nèi)應盡量減少這樣的目標。這就要求在設置航區(qū)的時候,盡可能選擇重要目標較少的區(qū)域。
結論
研究了無人機的安全概率計算模型,該模型將飛行任務分為發(fā)射起飛、飛行與回收三個階段,對各階段的危險概率進行計算,在采用一系列簡化和假設的基礎上,分析了無人機飛行航路設計和飛行航區(qū)設置對安全概率的影響,包括總航時、最遠飛行距離、航區(qū)內(nèi)重要目標的范圍等方面對安全概率的影響,并提出了有利于飛行安全性的航路和航區(qū)設置原則。

猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
