穿刺力檢測傳感器解耦方法研究
2019-12-17 02:27:38許德章
安徽工程大學學報 2019年5期
許 曙,許德章,梁 藝
(1.安徽工程大學 機械與汽車工程學院,安徽 蕪湖 241000;2.蕪湖安普機器人產業技術研究院有限公司,安徽 蕪湖 241000;3.先進數控和伺服驅動技術安徽省重點實驗室,安徽 蕪湖 241000)
在微創外科手術中,主治醫生進針操作完全憑借個人經驗,難以通過語言和示范等形式傳授給見習醫生。通過技術方法實時檢測進針過程的操作力,完整地記錄和直觀地顯示進針操作力,輔助醫生完成穿刺手術,對于微創外科臨床實踐具有重要應用價值和學術意義。輔助針穿刺系統有利于提高醫生進針過程的穩定性,減輕醫生勞動強度,減小創傷截面,加快患者手術恢復[1]。不同肌肉和組織層階的力學性質不同,表現出不同進針阻力特性。另外,為了達到更好的手術效果,不同肌肉和組織層階應采用不同的進針力。因此,實時識別進針阻力是滿足不同層階穿刺要求,及時調整進針策略的首要條件。
穿刺力檢測選用電阻應變片式六維力傳感器,傳感器彈性體形變轉換為應變片電阻值的變化,利用惠斯通電橋轉換輸出電信號,再經過放大電路和濾波電路,得到電壓輸出信號[2]。彈性體的結構、機械加工精度、應變片規格、貼片工藝等因素將導致維間信號存在耦合,影響傳感器測量精確度。標定和數字處理是實現六維力傳感器解耦,提高測量精度的關鍵環節。六維力傳感器標定需要借助標定實驗臺,完成標定數據采集。在六維力傳感器標定實驗臺研究方面,國內外研究單位取得了積極進展,中國科學院合肥智能機械研究所[3]在國內率先研制出靜態砝碼標定實驗臺,東南大學宋愛國[4,12]研制出砝碼重錘式標定實驗臺,合肥工業大學[5]也研制出類似標定試驗臺;北京強度研究所劉硯濤[6]采用液壓加載方式,研制出液壓標定實驗臺;郭凱[7]等采用虛擬儀器技術,在標定實驗臺基礎上添加了數據處理功能,推出了六維力傳感器靜態校準實驗系統。針對多維力傳感器解耦的問題,國內外學者做了大量探索性研究,C.Oddo[8]等基于小二乘法降低傳感器耦合噪聲,合肥智能機械研究所[9-10]采用神經網絡線性模型,通過樣本數據訓練學習方式獲得耦合權重矩陣;Osama Al-Mai[11]等采用最小二乘法(LSM),建立了耦合模型,獲得解耦矩陣。
在穿刺手術實施過程中,進針力非常小。為了提高傳感器的靈敏度和測量精度,要求傳感器彈性體的尺寸設計得比較小;另外,為了便于醫生操作和使用,要求傳感器機械結構盡可能緊湊。因彈性體尺寸小,各電阻應變片粘貼的間距也很小,導致維間耦合迅速增強;多維力傳感器量程較小,耦合誤差容易淹沒微小的測量信號,對解耦精度提出了更高要求[13-14];因此,用于穿刺力檢測的多維力傳感器,在標定和解耦環節,需要采取相應的技術措施才能滿足解耦精度的要求。
研究所用穿刺力檢測傳感器線性力量程30 N,轉矩30 N·cm量程。在傳感器標定過程中,選用了6位半精密電壓表,直接讀取各維放大電路輸出的電壓信號,采用人工判讀和后續數據處理,沒有采用計算機A/D轉換的數字值,避免A/D轉換過程噪聲信號混入。針對穿刺力傳感器量程小、耦合程度高的不利因素,設計了一款專用標定實驗臺。在傳感器標定過程中,逐一施加單方向載荷,測出各路輸出的電壓信號,繪制載荷和信號關系圖,人工判讀維間耦合關系,優化加載點,篩選標定數據,選擇耦合程度低的測量數據,再解算矩陣。
1 解耦原理
假設輸入和輸出呈線性關系,即傳感器受力與其輸出的電壓信號呈線性關系。在上述假設的基礎上,即傳感器承受的力與其輸出信號的電壓值呈比例,滿足以下數學模型
F6×6=C6×6×Si×j,
(1)
式中,F代表傳感器承受的力;S代表傳感器輸出信號的電壓值;C代表轉換矩陣,即解耦矩陣。解耦是測量的逆過程,即已知F和S,求解矩陣C。
C6×6=F6×6×(Si×j)-1,
(2)
為了便于求出C矩陣36個元素,采取單一方向逐次加載,測量6個通道(六維)輸出電壓信號的方式,確定C中某一行6個元素的值。因Fx、Fy和Fz標定過程相同,現以Fx方向為例,闡明標定原理。
(3)
僅在Fx方向施加力時,測出(s11s21s31s41s51s61)T,得到式(4):
c11s11+c12s21+c13s31+c14s41+c15s51+c16s61=Fx,
(4)
顯然,一次加載和標定,無法確定式(4)中6個未知數c11、c12、…、c16。因此,需要在傳感器量程范圍內,取6個標定點,逐個加載標定,獲得6個方程組成方程組,才能確定式(4)中6個未知數。
因在加載Mx和My力矩過程中,Y和X方向分別伴隨一個線性力,以Mx力矩加載為例,存在式(5)關系:
(5)
其中,(m41m42m43m44m45m46)T為Fy+Mx,
(6)
式(5)中的m14、m24、…、m64分量分別減s14、s24、…、s64,得到僅包含Mx力矩的關系式(6),可實現Mx方向單一加載的目的。
為了方便數據處理,對輸出電壓矩陣[S]做歸一化處理,得到式(7):
(7)

(8)
由式(8)可知,W6×6為耦合矩陣,W6×6逆矩陣為解耦矩陣C6×6。
2 標定實例
2.1 實驗標定系統
借助回轉刀架的回轉和分度功能,組建的實驗標定系統如圖1所示。選用DMM-M3065型6位半精密電壓表,直接測量傳感器六路放大電路輸出信號的電壓值。選用普源M300系列數據采集/開關,實現測量通道切換,輪流測量傳感器六路放大電路輸出信號的電壓值。
2.2 預標定
為了驗證假算的合理性,以Fx方向為例,開展預標定實驗。在已知載荷Fx大小和輸出電壓值(s11s12s13s14s15s16)條件下,解算(c11c12c13c14c15c16)6個未知數。穿刺力檢測傳感器尺寸為?80 cm×50 cm,結構如圖2所示。Fx和Fy最大量程為16 N,Fz最大量程為30 N,Mx和My最大力矩為15 N·cm,Mz最大力矩為30 N·cm。
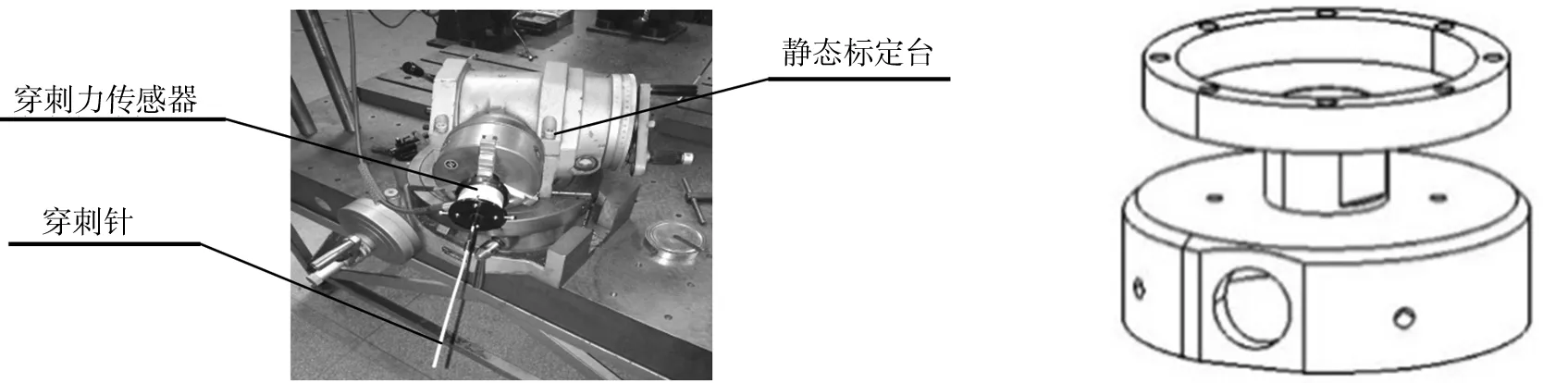
圖1 傳感器標定系統圖2 穿刺力檢測傳感器結構圖

2.3 標定過程
依據前文標定原理,Fx、Fy、Fz和Mz可以施加單一載荷,Mx和My在加載過程中伴隨附加線性力,Fx、Fy、Fz、Mz及Mx、My按兩類性質載荷逐一加載,標定傳感器,求解解耦矩陣。將6個測量通道調零。
(1)調整三爪卡盤,使Fx垂直于地面,加掛砝碼,在Fx正方向施加載荷。
(2)Fx正方向依次懸掛4.9 N、9.8 N、14.7 N、9.8 N、4.9 N、9.8 N、14.7 N砝碼,依次讀取6個通道輸出信號的電壓值,完成Fx正方向標定。標定點與6個通道輸出信號電壓值對應關系如表2所示。
(3)調整三爪卡盤位置,依次懸掛4.9 N、9.8 N、14.7 N、9.8 N、4.9 N、9.8 N、14.7 N砝碼,依次讀取6個通道輸出信號的電壓值,完成Fx負方向加載。
(4)調整三爪卡盤,標定Fy分方向,正負加載點選擇與Fx方向標定點一致。
(5)Fz只標定正方向,標定點依次選擇9.8 N、19.6 N、29.4 N、19.6 N、9.8 N、19.6 N和29.4 N。
(6)在Fx方向施加正負相等的偏心力,Fx方向正負線性力相互抵消,只產生Mz等效力矩,偏心距離L選擇30 mm。Fx方向加載點選擇4.9 N、6.86 N、8.82 N、6.86 N、4.9 N、6.86 N、8.82 N,對應Mz的等效力矩分別為14.7 N·cm、20.58 N·cm、26.46 N·cm、20.58 N·cm、14.7 N·cm、20.58 N·cm、26.46 N·cm。為了消除Fx單一方向加載形成的不對稱誤差,在Fy方向選擇與Fx相同的標定點,再做一次標定。Fx和Fy方向同一加載點的測量結果求平均。
(7)在Fy分方向施加偏心力,偏心距離L選擇50 mm,產生Mx力矩。Fy偏心力選擇0.98 N、1.96 N、2.96 N、1.96 N、0.98 N、1.96 N、2.96 N標定點,在Mx+方向產生4.9 N·cm、9.8 N·cm、14.7 N·cm、9.8 N·cm、4.9 N·cm、9.8 N·cm、14.7 N·cm等效力矩。
(8)My加載方式和標定點選擇與Mx一致。
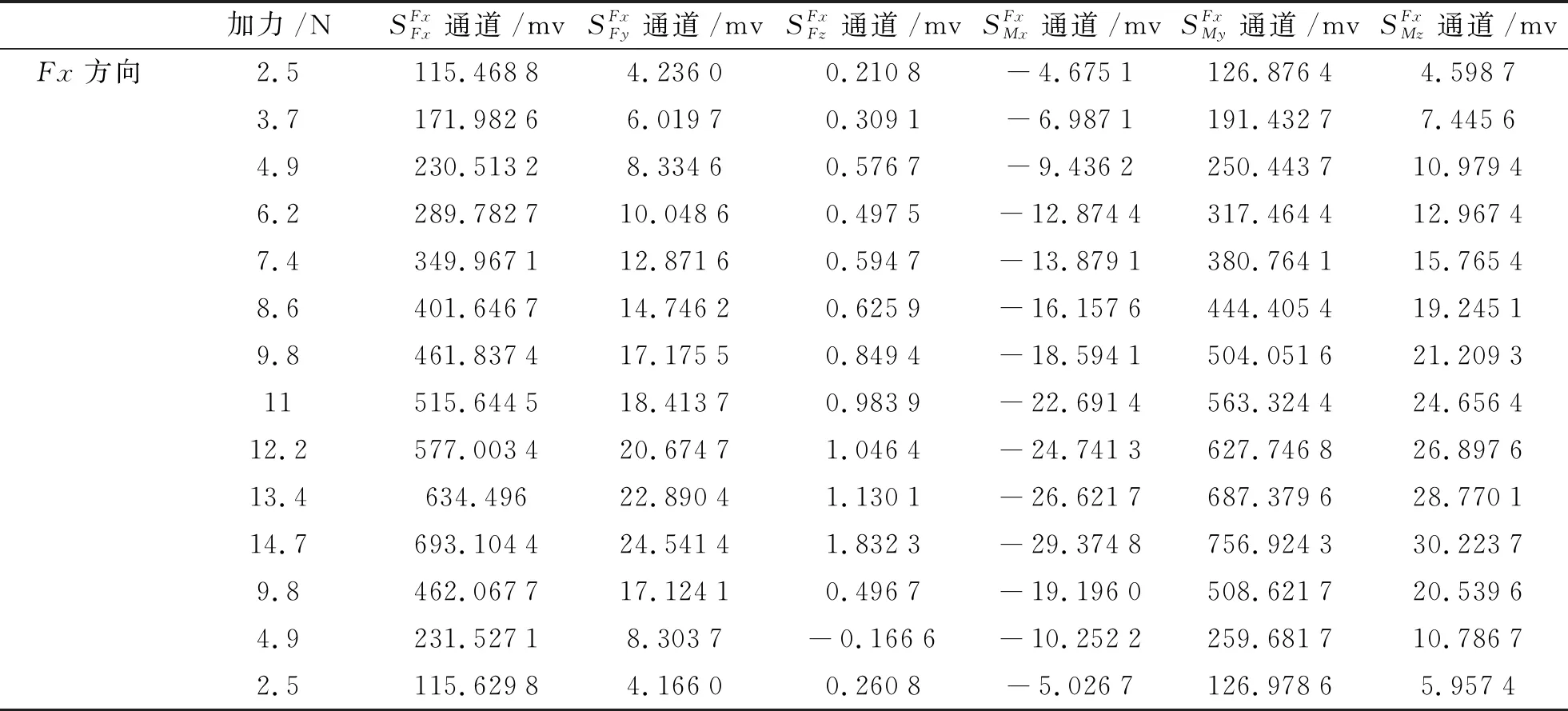
表1 Fx方向載荷電壓表
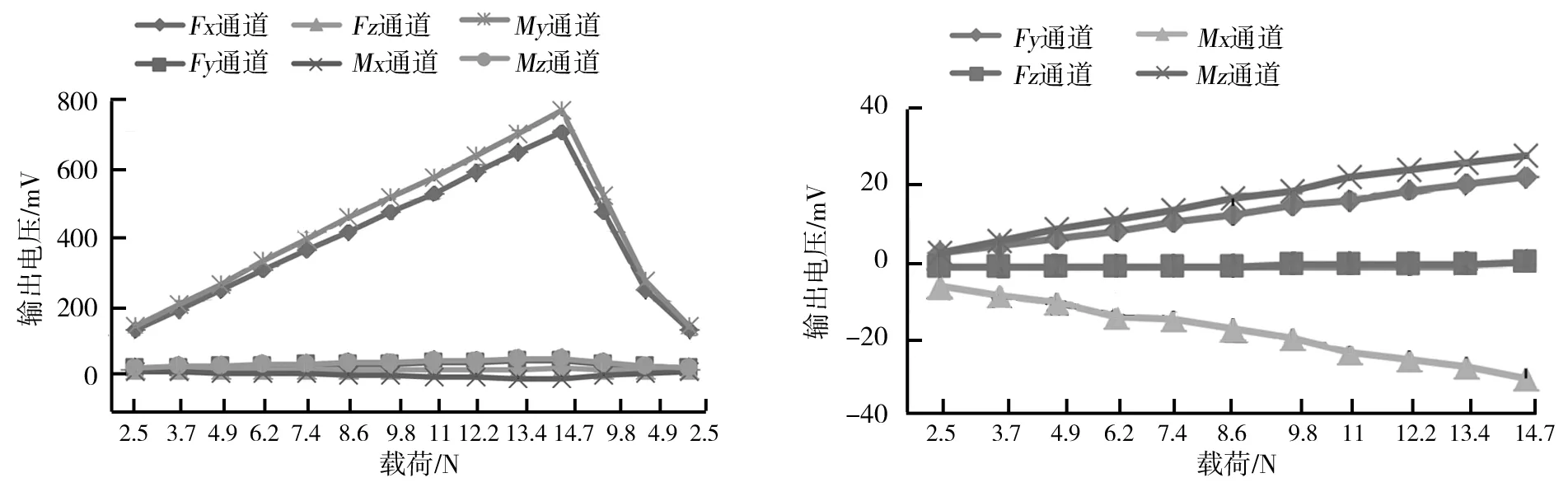
圖3 Fx載荷圖 圖4 Fy、Fz、Mx和Mz方向輸出放大圖
2.4 數據處理
在一個單一方向施加載荷,6個方向都有電壓輸出信號,在Fx+方向依次施加4.9 N、9.8 N、14.7 N、9.8 N、4.9 N、9.8 N、14.7 N載荷,各通道輸出電壓如表2所示。
選擇適當標定點,完成Fy、Fz、Mx、My和Mz方向加載,得到與表2類似的輸出關系。依據前文所述的傳感器標定原理,對輸出電壓矩陣做歸一化處理,得到表3。
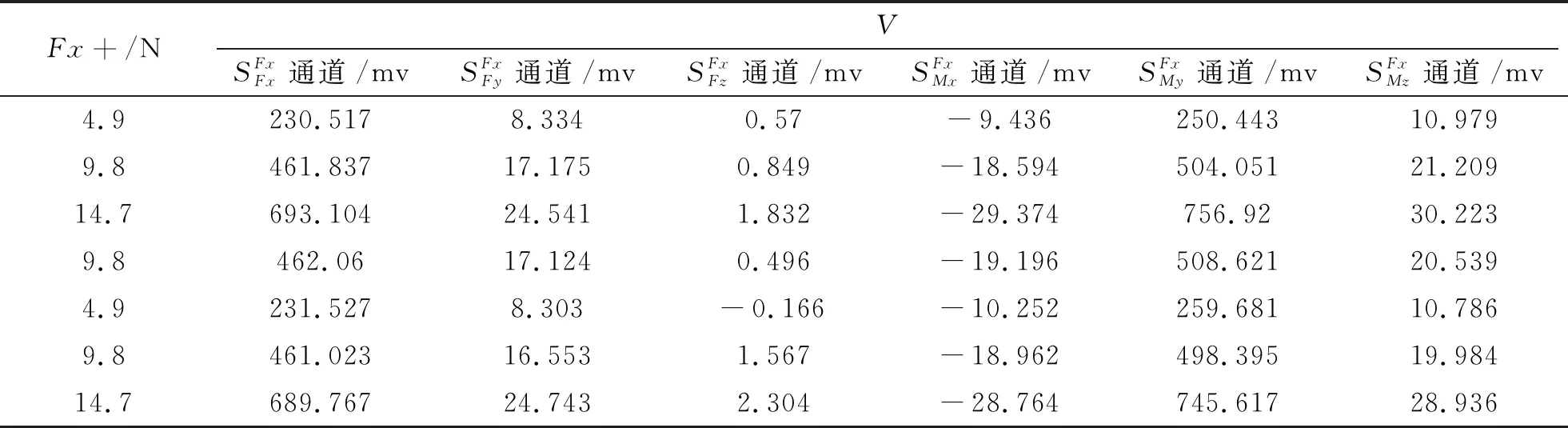
表2 Fx+方向載荷與輸出電壓的對應關系
Mx和My在標定過程伴隨偏載力矩,依據關系式(6)消除偏載力矩后,表3的數據轉換成表4。此時,各通道施加的力或力矩等效為單一載荷。

表4 等效單一載荷歸一化結果
結合表3和表4,針對6個加載方向的正、負標定點做平均化處理,獲得的結果如表5所示。表5的數據與關系式(7)中的W6×6矩陣內各元素對應。求W6×6的逆矩陣,得到標定矩陣[C]。標定矩陣[C]各元素具體如表6所示。
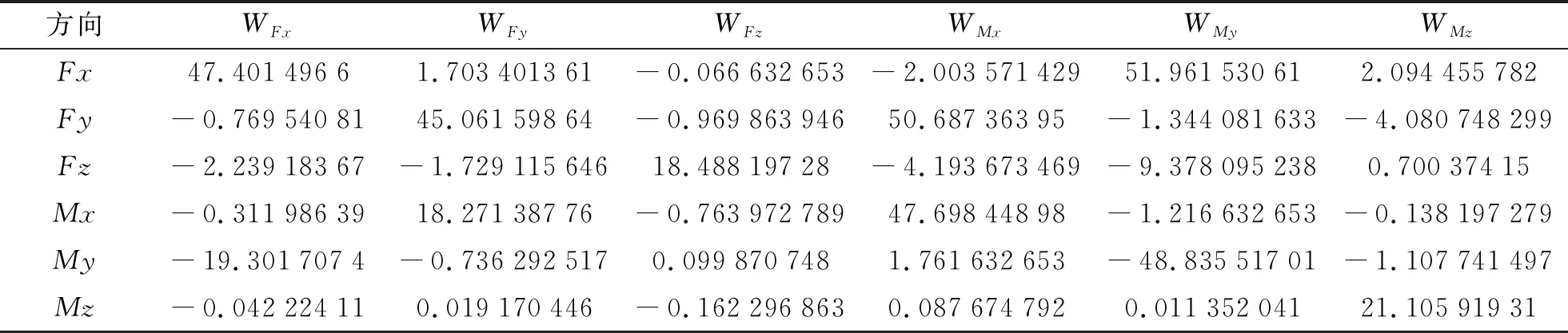
表5 平均化結果
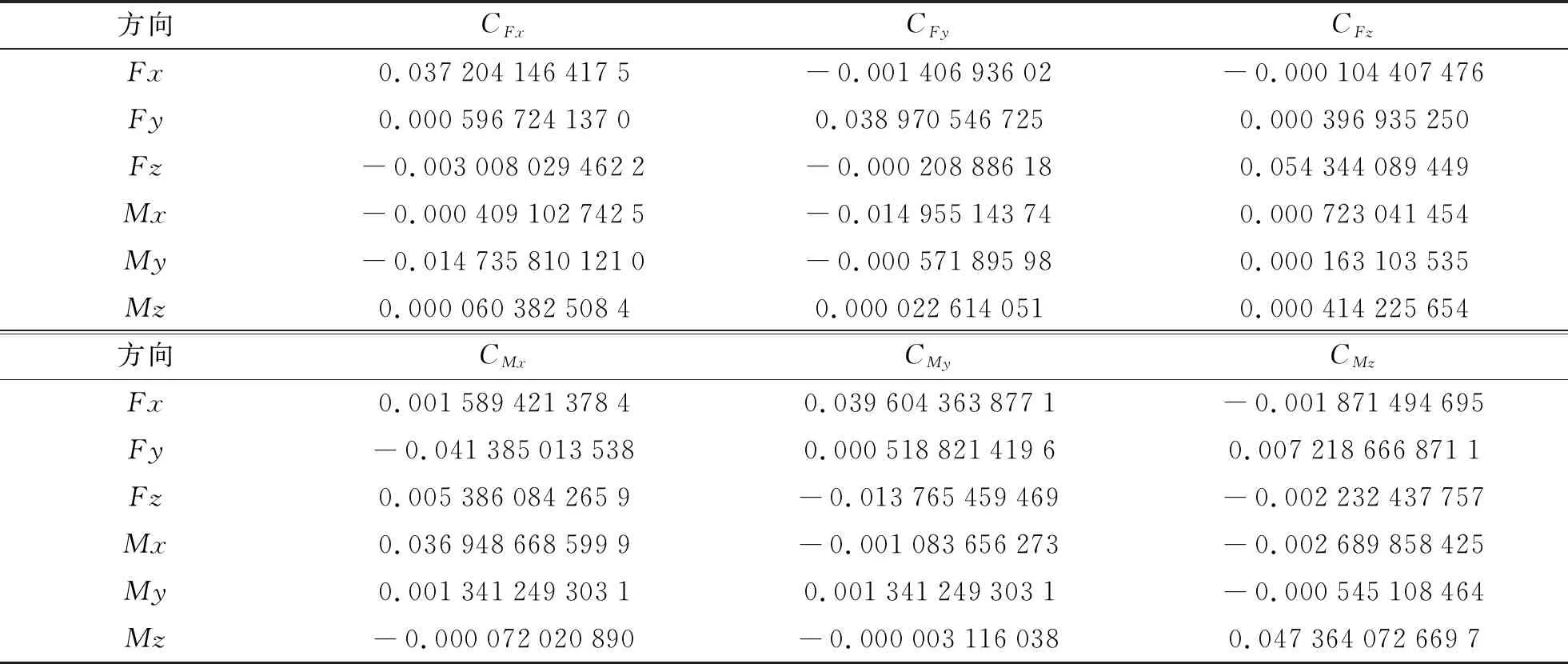
表6 逆矩證
3 結論
研究以穿刺力檢測傳感器為對象,采取單方向逐次加載的方法,針對力矩加載過程中的附加線性力,采取了附加線性力消除措施,推導出六維傳感器的解耦矩陣。選用精密分度刀架,構建了可單方向逐次加載的標定裝置。針對小量程多維力傳感器標定過程中存在耦合性強、線性度差等困難,采取優化標定點,選用六位半精密電壓表,直接測量傳感器放大電路輸出信號的電壓值等措施,有效地提高了傳感器的標定精度。預標定曲線表明,傳感器的輸入和輸出呈現良好的線性關系,求解的耦合矩陣有效地消除了各維間的耦合關系。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00