機器視覺側圍涂膠檢測系統的設計與研究
2019-12-17 02:06:00胡莊穩陸華才高文根
安徽工程大學學報 2019年5期
胡莊穩,陸華才,高文根
(安徽省電氣傳動與控制重點實驗室,安徽 蕪湖 241000)
隨著人們生活條件的提高,人們對車的質量的要求越來越高,汽車生產商要想造出高質量的車子,必須嚴格控制生產線每道工位的工藝水平,人工目檢已經無法滿足現代化汽車行業需求,機器視覺在智能化裝配技術中已經成了主流的檢測方法。
傳統的涂膠軌跡寬度測量采用抽檢的方法,用游標卡尺測量,直接接觸測量易導致軌跡變形,測量不準確,影響節拍,返工頻率高。機器視覺采用的是非接觸性測量,它既可以在復雜環境下檢測工件,也可以檢測精度要求高的工件。由于機器視覺檢測具有速度快、結構簡單、測量精度高、操作簡單等優點,已經成為智能化生產線的主流檢測工具。該系統選用機器視覺技術測量膠寬,用張正有標定法[1]對工業相機標定,采用雙邊濾波[2]和邊緣檢測[3]融合圖像處理技術,最后運用改進的最小二乘擬合算法得到被測物體的寬度。經反復檢測表明用機器視覺測量涂膠軌跡寬度誤判率低、節拍快、系統運行可靠,該系統的設計有效地提高了側圍涂膠質量及安全性能。
1 系統硬件組成
該系統專為焊裝涂膠側圍門工位所設計,系統組成如圖1所示。由圖1可知,系統由六自由度機器人、視覺系統、供膠系統、溫度控制系統、電氣控制系統、工業計算機等組成。
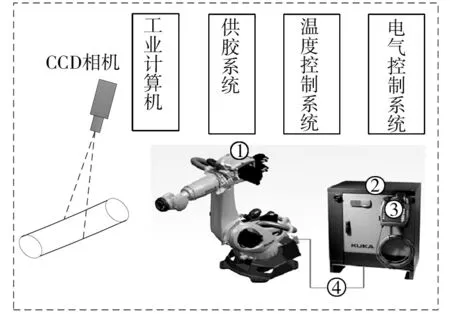
圖1 系統組成圖
系統選用庫卡系列機器人,機器人本體包括六關節聯動機器人[4]、示教器、電氣控制柜和連接電纜。KUKA機器人在示教軌跡時有3種編程方法,分別為PTP、LINE、CIRCLE,在手動示教時要根據具體的情況設定好目標移動速度,3種示教軌跡的目標移動速度如表1所示。

表1 目標移動速度
電氣控制系統主要用來控制整個系統動作及傳輸信號,六自由度庫卡機器人用來完成涂膠運動軌跡和安裝白車身側圍。在第六軸上設計側圍夾具裝置[5],當執行任務時,機器人從home點移動到門工位通過夾具抓取,PLC給機器人信號執行下一個任務,最后系統主程序調用手動示教好的子程序通過發送程序號來引導機器人完成涂膠任務。
供膠系統主要是用來提供涂膠量,該系統理想氣壓設置范圍為4~6 bar,系統設計用行程開關來控制雙泵切換運行。供膠系統包括溫控單元,因為膠具有黏性,所以通過加熱才能從涂膠嘴均勻流出,溫度是影響膠流量和質量的主要因素,加熱區域溫度低于正常設定值會導致涂膠軌跡偏窄或者斷膠,加熱區域溫度過高會導致膠老化而造成質量風險。選用PID溫控器來控制加熱區域溫度值,溫度設定標準范圍為25 ℃~35 ℃,如果溫度超出標準設定范圍會發出報警,該單元可以實時監控加熱區域情況,提高涂膠質量。涂膠寬度的工藝參數如表2所示。

表2 膠寬參數
2 視覺硬件系統設計
視覺檢測系統不管是用來測量產品還是檢測產品表面缺陷,需要注意幾個問題。首先要搭建硬件結構如圖2所示,硬件搭建選型合理和相機安裝位置合理都有利于確保后期軟件調試的成功率。其次要拍攝目標物體獲得清晰圖像,相機在工業現場獲取圖片時會受到光線干擾以及關聯工位運行產生的振動等因素影響,這些因素都會導致最終的檢測結果不準確。因此,為了減小這些干擾因素的影響,將相機在涂膠槍旁邊的支架上固定好,不能安裝在運動物體上。同時設計防護罩將光源單元與外界隔離,這些措施可以有效避免外界干擾。系統選擇CCD相機拍攝圖片,光源采用LED白光,因為白光魯棒性在此環境下是最優的。用工業計算機來監控采集圖像,圖像采集卡主要用來采集和處理圖片,使用西門子S7-300PLC與外部交接信號。
工業相機在測量圖像前必須要通過標定,標定過程中參數穩定或者不穩定會直接影響相機在檢測中的準確性。主流的標定方法有halcon和張正友兩種,帶有棋盤格的標定板是常用的視覺標定工具,如圖3所示[6]。標定步驟是移動標定板不同位置和距離讓攝像機對準標定板進行拍照,再通過拍攝棋盤格板上圖像的點與匹配模板上的點進行邏輯計算[7],最后推導出照相機內參和外參。
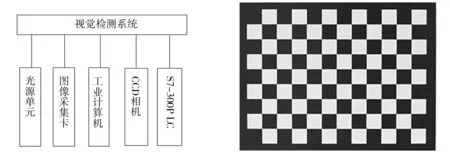
圖2 視覺硬件結構 圖3 標定板
理想坐標(x,y)與相機坐標(xa,ya,za)關系表達式為:
(1)
(2)
全局坐標與理想坐標的映射投影矩陣表達式為:
(3)
式中,M為相機內參數矩陣;N是攝像機外參;R是相對模型攝像機旋轉;T是平移量。將M、R、T用矩陣表示如下:
(4)
(5)
理想P點和匹配模板P點中的單應性N=M[a1a2T]矩陣相關聯,假設矩陣N為照相機內外參數,通過變化求出透視數學模型和變換后U、V表達式如式(6)所示。
(6)
由于相機會受到外界的影響,導致實際圖像點上會產生畸變,所以重建時需要考慮畸變存在。假設理想的圖像坐標為(xu,yu),圖像發生畸變的坐標為(xd,yd),可得出式(7):
(7)
相機受到其他因素的影響會發生畸變現象,導致圖像點發生偏移的表達式為:
(8)
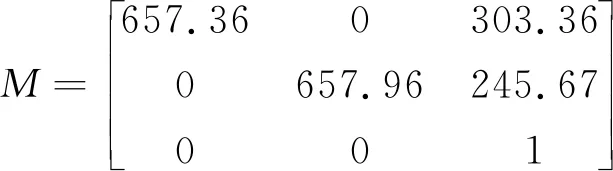
由式(7)、式(8)可以算出內部參數M為:
3 圖像處理技術
要想使測量結果準確,須進行圖像預處理來消除圖像的干擾信息,把一些無關的信息去除。在工業生產現場由于受到環境等因素制約,CCD相機拍攝的圖像存在噪聲干擾,從而采集的圖像清晰度達不到理想的要求,因此在采集圖像前要對圖像進行處理。圖像處理技術有雙邊濾波、中值濾波、二值化、圖像分割、模板匹配等,為了使相機能更好識別到測量物體,保證測量精度,采取雙邊濾波和邊緣提取圖像處理技術。常用的邊沿檢測方法有Sobel、Robert、Prewitt、Log、Canny邊沿檢測,用Matlab2016a仿真,幾種不同算法邊緣提取仿真圖如圖4所示。經過仿真比對選用Canny邊沿提取測量效果最好。

圖4 Matlab仿真圖
4 測量方法
通過Canny算子對圖像邊沿提取得到圖像的輪廓,在測量前先要找到圖像輪廓擬合的直線。因此,研究使用改進的最小二乘擬合算法測量涂膠軌跡寬度。設直線方程為:
y=ax+b,
(9)
計算值y與真實值yi誤差記為fi,其表達式為:
fi=yi-axi-b,
(10)
當計算值與真實值誤差最小時,擬合直線與實際檢測的軌跡邊緣點最接近,為了確定y=ax+b中的常數和最小值,聯立方程組:
(11)
由式(11)推導出:
求出a、b的值,通過直線擬合得到邊沿圖像如圖5所示。由圖5可知,兩條邊沿直線d1和d2之間的距離就是需要測量的寬度。
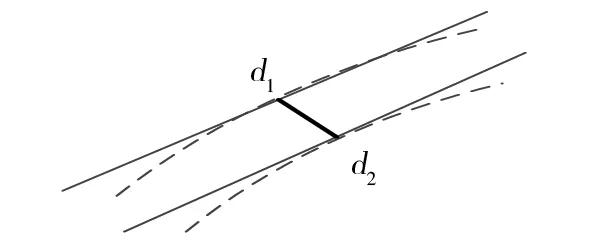
圖5 直線擬合

圖6 系統邏輯控制圖
5 系統的軟件設計及工作流程
該控制系統軟件選用西門子博途1500PLC,它主要由電源模塊、CPU、接口模塊、IO模塊等組成[8]。機器人系統、視覺檢測系統和電氣控制系統等控制模塊通過以太網發送和接收信號來完成整個系統的邏輯控制,具體如圖6所示。當系統電源開關打開時,各個控制模塊上電后系統開始準備就緒。當側圍總成到達涂膠工位時,通過光電傳感器檢測白車身,PLC給機器人發送程序號,機器人通過程序號調用運動軌跡來抓取側圍。機器人本體運動速度設定為0.9 m/s,通過PLC與機器人之間的交接信號,機器人用主程序調用子程序,按照示教好的運動軌跡進行涂膠,視覺實時檢測涂膠軌跡是否合格。如果視覺檢測兩次不合格,機器人會把抓取的側圍總成自動放到待處理區,系統發出報警,此時系統會自動停止,蜂鳴器發出報警聲,等待維修人員處理故障。當視覺檢測合格情況下機器人完成一次涂膠,機器人自動把側圍總成安裝到白車身上,流程結束機器人回home,等待下次執行任務,如此循環運行工作。
6 實驗結果
為了觀察檢測結果,研究以Matlab 2016a軟件作為實驗平臺。用理想涂膠軌跡為5 mm寬度分別進行人工測量和機器視覺測量20次,測量數值如圖7所示,實驗數據表明人工測量數值與理想測量數值對比誤差值大,檢測精度低。機器視覺測量數值與理想測量數值對比誤差值小,測量數值在5±1 mm要求范圍內,檢測精度高。

圖7 測量誤差偏移
通過上述數據結果比對可知,用機器視覺測量涂膠軌跡寬度誤差小、誤判率低,有效地解決了焊裝生產線白車身側圍總成涂膠工位漏水、漏膠等問題。從節拍上分析可知,用人工測量時間最少要180 S,全部檢測無法滿足生產需求,用機器視覺測量60 S就可以完成,后期因生產需求無論怎樣提高生產節拍都可以滿足生產。由此可知,在側圍涂膠工位使用機器視覺測量技術有利于提高汽車生產線涂膠工位節拍和檢測精度。
7 結論
通過設計視覺側圍涂膠檢測控制系統,介紹系統的硬件組成和軟件的邏輯控制順序,搭建視覺檢測系統硬件結構,采用視覺技術測量涂膠軌跡寬度,實現了流體智能化測量,提高生產線作業的工作效率,避免了涂膠軌跡偏寬造成裝配時漏膠,涂膠軌跡偏窄造成側圍總成漏水的質量風險。在實驗中多次測量,驗證了系統設計的可靠性。因此,機器視覺檢測技術有利于在汽車生產流水線涂膠工位上的廣泛應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45