綜合電機(jī)特性的柔性關(guān)節(jié)空間機(jī)器人全階滑模控制
2019-12-21 01:59:24朱安,陳力
關(guān)鍵詞:系統(tǒng)
朱 安,陳 力
(福州大學(xué)機(jī)械工程及自動(dòng)化學(xué)院,福建 福州 350108)
0 引言
隨著人類對太空探索的不斷深入,必然出現(xiàn)大量如空間站的組裝、故障衛(wèi)星的回收、太空垃圾的清理等太空任務(wù),利用空間機(jī)器人來完成上述太空任務(wù)已被各國研究人員認(rèn)為是一種行之有效的方案.因此,對空間機(jī)器人系統(tǒng)動(dòng)力學(xué)與控制的研究被越來越多的學(xué)者關(guān)注[1-6].由于空間機(jī)器人的關(guān)節(jié)諧波減速器及傳動(dòng)機(jī)構(gòu)等存在固有的柔性,因此其關(guān)節(jié)不可避免地存在柔性.繼續(xù)用純剛性關(guān)節(jié)假設(shè)的空間機(jī)器人系統(tǒng)顯然已經(jīng)達(dá)不到太空任務(wù)的要求,如何對關(guān)節(jié)存在柔性的空間機(jī)器人進(jìn)行精確控制已被眾多研究者重視.
Ulrich等[7]對柔性關(guān)節(jié)空間機(jī)器人系統(tǒng)的動(dòng)力學(xué)方程進(jìn)行了推廣,且提出了一種擴(kuò)展卡爾曼濾波策略.Steve 等[8]對柔性關(guān)節(jié)空間機(jī)器人的自適應(yīng)反饋控制進(jìn)行了研究,提出一種基于分散自適應(yīng)控制的復(fù)合控制方案;Zarafshan等[9]將空間機(jī)器人系統(tǒng)劃分為剛性和柔性兩部分,得到了其精確的動(dòng)力學(xué)模型,且基于虛擬阻尼參數(shù)的變化規(guī)律,提出一種自適應(yīng)混合抑振算法;張奇等[10]根據(jù)關(guān)節(jié)驅(qū)動(dòng)電機(jī)的動(dòng)力學(xué)特性建立了柔性關(guān)節(jié)機(jī)器人系統(tǒng)動(dòng)力學(xué)模型,且得出了柔性關(guān)節(jié)等效剛度和關(guān)節(jié)力矩的非線性關(guān)系.但上述研究人員均未考慮電機(jī)特性,而在空間機(jī)器人系統(tǒng)的動(dòng)力學(xué)模型中,考慮電機(jī)的動(dòng)力學(xué)特性,以表現(xiàn)特別是在高速力矩、高變化負(fù)載、摩擦和電機(jī)飽和等因素下完整的動(dòng)力學(xué)特性及實(shí)現(xiàn)高精度的軌跡跟蹤是至關(guān)重要的.此外,電機(jī)的動(dòng)力學(xué)特性會(huì)影響系統(tǒng)的動(dòng)態(tài)特性和穩(wěn)定性,甚至在機(jī)器人動(dòng)力學(xué)模型中占主導(dǎo).因此,本研究在建模過程中嘗試將電機(jī)特性考慮到動(dòng)力學(xué)模型中,從而表現(xiàn)空間機(jī)器人完整的動(dòng)力學(xué)特性與軌跡的高精度跟蹤.
滑模控制因具有良好的魯棒性而獲得了大量關(guān)注[11-13],但因傳統(tǒng)滑模控制器中含有切換項(xiàng),其不可避免地存在抖振問題.若不消除或抑制抖振,其會(huì)激發(fā)系統(tǒng)建模時(shí)忽略的高頻動(dòng)力學(xué)特性,進(jìn)而使得控制性能下降,甚至造成機(jī)械部件的磨損.近年來全階滑模控制備受學(xué)者關(guān)注[14-15],相較于傳統(tǒng)滑模控制,其不存在切換項(xiàng),可以在保持傳統(tǒng)滑模魯棒性強(qiáng)、結(jié)構(gòu)簡單等優(yōu)點(diǎn)的同時(shí),有效地克服抖振問題,并保證系統(tǒng)收斂到平衡點(diǎn).由于空間機(jī)器人在工作的過程中不斷消耗液體燃料,且惡劣的太空環(huán)境使空間機(jī)器人系統(tǒng)參數(shù)攝動(dòng).因此,一般情況下,空間機(jī)器人系統(tǒng)的參數(shù)難以準(zhǔn)確獲得,而徑向基(radial basis function,RBF)神經(jīng)網(wǎng)絡(luò)能以任意精度逼近非線性項(xiàng),故采用其對因系統(tǒng)未知參數(shù)而產(chǎn)生的非線性項(xiàng)進(jìn)行逼近.因此,基于奇異攝動(dòng)理論,將柔性關(guān)節(jié)空間機(jī)器人系統(tǒng)分解為由柔性關(guān)節(jié)引起的系統(tǒng)柔性運(yùn)動(dòng)部分的快變子系統(tǒng)和系統(tǒng)剛性運(yùn)動(dòng)部分的慢變子系統(tǒng).針對快變子系統(tǒng),采用了速度差值反饋控制方案主動(dòng)抑制空間機(jī)器人關(guān)節(jié)的柔性振動(dòng);針對慢變子系統(tǒng),提出了基于徑向基神經(jīng)網(wǎng)絡(luò)的全階滑模控制方案來進(jìn)行空間機(jī)器人機(jī)械臂的軌跡跟蹤.最后,通過系統(tǒng)的數(shù)值仿真結(jié)果來證明所提的控制方案對柔性關(guān)節(jié)空間機(jī)器人具有良好控制效果.
1 系統(tǒng)動(dòng)力學(xué)方程

圖1 自由漂浮柔性關(guān)節(jié)空間機(jī)器人系統(tǒng)Fig.1 Free-floating flexible joint space robot system
不失一般性,自由漂浮柔性關(guān)節(jié)空間機(jī)器人系統(tǒng)的幾何模型如圖1所示.其中XOY為平動(dòng)的慣性參考坐標(biāo)系,X0O0Y0為固定在載體質(zhì)心上的坐標(biāo)系,XiOiYi(i=1,2)是固定在關(guān)節(jié)鉸中心上的坐標(biāo)系.其他符號(hào)定義如下:m0、I0、d0分別為載體質(zhì)量、轉(zhuǎn)動(dòng)慣量、質(zhì)心到第一個(gè)關(guān)節(jié)鉸中心的距離;mi、Ii、Li、di(i=1,2)分別為第i個(gè)機(jī)械臂的質(zhì)量、轉(zhuǎn)動(dòng)慣量、長度、質(zhì)心到第i個(gè)關(guān)節(jié)鉸中心的距離;Iαi(i=1,2)為各電機(jī)轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量;ki(i=1,2)為各柔性關(guān)節(jié)的等效扭轉(zhuǎn)剛度;θ0、θi、θαi(i=1,2)分別為載體姿態(tài)角、機(jī)械臂轉(zhuǎn)角和電機(jī)轉(zhuǎn)角.

圖2 柔性關(guān)節(jié)示意圖Fig.2 Schematic of flexible joint
圖2為柔性關(guān)節(jié)示意圖,其中ταi(i=1,2)為各電機(jī)輸出力矩,τLi(i=1,2)為各電機(jī)軸負(fù)載力矩,τRi(i=1,2)為各關(guān)節(jié)輸入力矩,ni(i=1,2)為關(guān)節(jié)諧波減速器減速比.
由圖1可以導(dǎo)出在慣性參考坐標(biāo)系XOY下的系統(tǒng)總質(zhì)心矢徑rC、載體質(zhì)心矢徑r0、機(jī)械臂i(i=1,2)質(zhì)心矢徑ri分別為
rC=[xC,yC]T
(1)
r0=[x0,y0]T
(2)

(3)
式中:xC,yC、x0,y0分別為系統(tǒng)總質(zhì)心、載體質(zhì)心的坐標(biāo)值;ai(i=0,1,2)為xi軸的基矢量.
系統(tǒng)總質(zhì)心的定義為
(4)
式中:M=m0+m1+m2.由式(1)~(4)可解出

(5)
式中:λ00=-(m1+m2)L0/M,λ01=-(m1d1+m2L1)/M,λ02=-m2a2/M;λ10=L0+λ00,λ11=a1+λ01,λ12=λ02;λ20=λ10,λ21=L1+λ01,λ22=a2+λ02.

(6)

(7)

(8)

在忽略太空環(huán)境微重力的影響下,空間機(jī)器人系統(tǒng)動(dòng)量矩守恒,假設(shè)系統(tǒng)初始動(dòng)量矩為零,即

(9)


(10)
式中:Ξ?、Ξα∈R2×2為系統(tǒng)動(dòng)力學(xué)參數(shù)及系統(tǒng)廣義坐標(biāo)的函數(shù).因此,結(jié)合式(8)、(10)可得完全驅(qū)動(dòng)形式的柔性關(guān)節(jié)空間機(jī)器人動(dòng)力學(xué)方程
(11)

2 控制器的設(shè)計(jì)
2.1 快變子系統(tǒng)控制器的設(shè)計(jì)
基于奇異攝動(dòng)理論,把電機(jī)輸出力矩τα分為主動(dòng)抑制關(guān)節(jié)柔性振動(dòng)的快變子系統(tǒng)控制力矩τf和保證機(jī)械臂軌跡跟蹤性能的慢變子系統(tǒng)控制力矩τs
τα=τf+τs
(12)
令柔性關(guān)節(jié)簡化的線性彈簧彈力z?=K(qα-q?)為快變量,機(jī)械臂轉(zhuǎn)角q?為慢變量.定義正比例因子ε及正定對角矩陣K1∈R2×2,并使其取值滿足如下關(guān)系

(13)
通過式(13)可將式(11)的第二、三式合并為如下形式

(14)
若設(shè)計(jì)如下形式的快變子控制力矩

(15)
式中:Kf=K2/ε,K2∈R2×2為正定對角矩陣.則將式(12)、(15)代入式(14)得快變子系統(tǒng)動(dòng)力學(xué)方程

(16)


(17)

由文獻(xiàn)[13]知τα=Kαia,結(jié)合式(12)得
(18)
式中:Kα∈R2×2為電機(jī)靈敏度矩陣.結(jié)合式(16)~(18)可得電流形式的快變子和慢變子系統(tǒng)動(dòng)力學(xué)方程為:

(19)

2.2 慢變子系統(tǒng)控制器的設(shè)計(jì)
性質(zhì)1正定慣性矩陣Dsα?滿足有界性,即

(20)


(21)


(22)
基于式(22)設(shè)計(jì)如下全階滑模變量:

(23)
式中:ηi=diag(ηi1,ηi2)(i=1,2)為正定常數(shù)矩陣,且ηi的選取應(yīng)保證多項(xiàng)式p2+η2jp+η1j(j=1,2)的特征根具有負(fù)實(shí)部.
控制器采用類似一階低通濾波器的形式

(24)
式中:Λ=diag(Λ1,Λ2)為正定常數(shù)矩陣;iL∈R2×1為濾波后虛擬控制列向量,其具體形式由下文給出.
將式(24)代入式(19)第二式并整理得

(25)
對式(23)求導(dǎo)可得

(26)



ρ=W*Tφ(y)+δ
(28)


(29)



(30)
式中:β1>δN,β2>0,is?定義如下
(31)


(32)

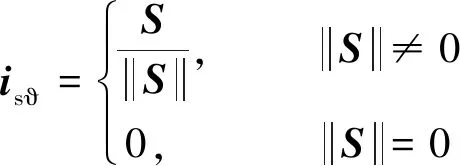
因此,基于上述分析,針對綜合電機(jī)特性的柔性關(guān)節(jié)機(jī)器人系統(tǒng),采用圖3所示的控制結(jié)構(gòu).
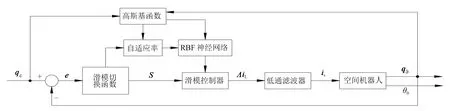
圖3 基于徑向基神經(jīng)網(wǎng)絡(luò)的全階滑模控制Fig.3 Full order sliding mode control based on RBF neural network
定理1對于給定的慢變子系統(tǒng)動(dòng)力學(xué)方程式(19),假如全階滑模變量采用如式(23)所示形式,控制率采用如式(30)所示形式,徑向基神經(jīng)網(wǎng)絡(luò)自適應(yīng)率采用如式(32)所示形式,則可保證系統(tǒng)漸進(jìn)收斂.
證明 選取如下形式的Lyapunov函數(shù)

(33)
對V求導(dǎo)得

(34)
結(jié)合式(27)、(28)、(30)、(34),并利用性質(zhì)2得
將式(32)代入式(35)得

(36)

(37)

3 數(shù)值仿真


圖4 所提策略的載體姿態(tài)角變化情況Fig.4 Attitude angle change of the proposed strategy
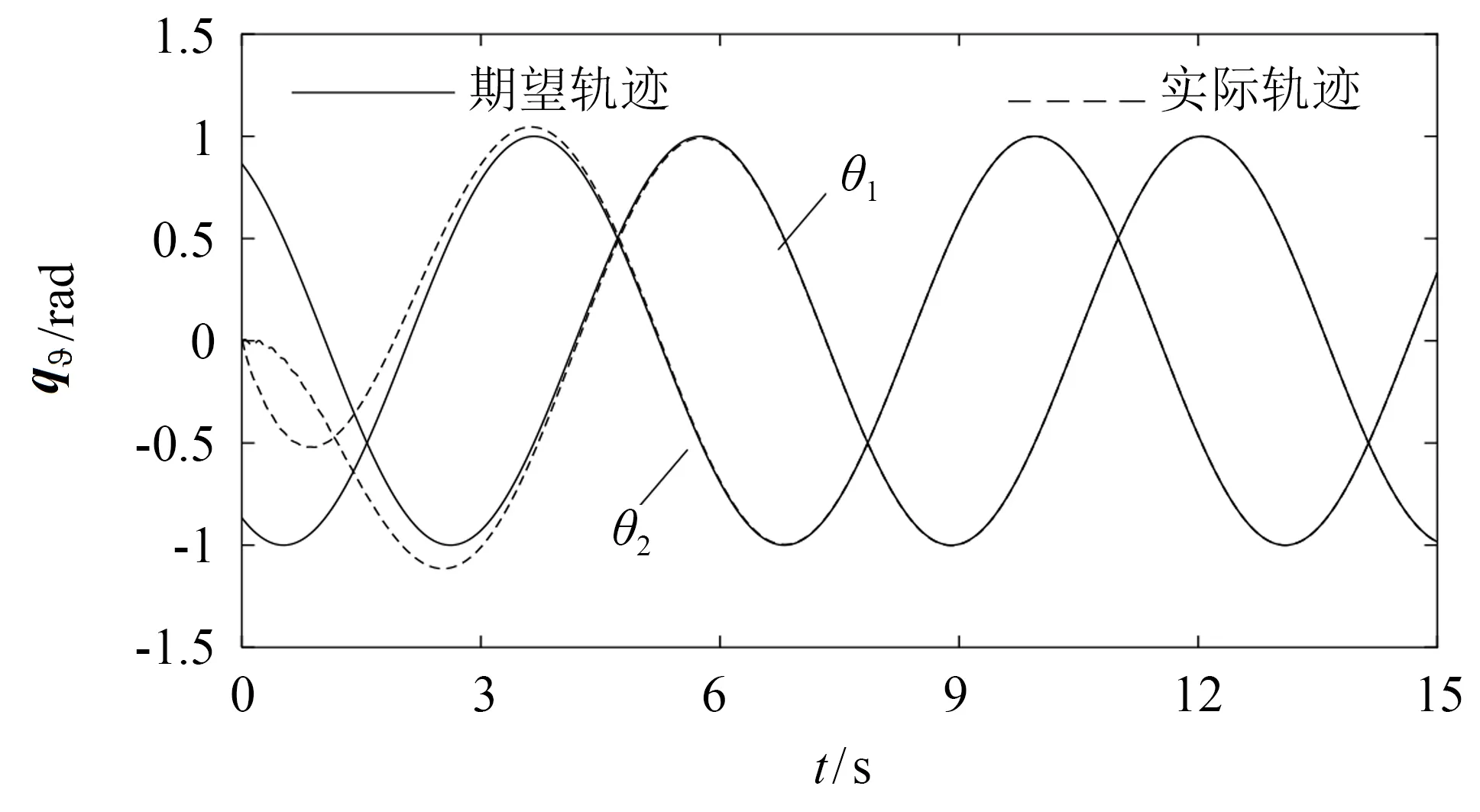
圖5 所提策略的兩機(jī)械臂轉(zhuǎn)角跟蹤情況Fig.5 Two manipulators' angle tracking of the proposed strategy
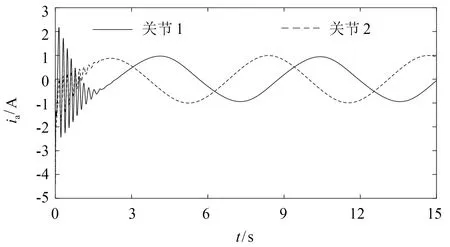
圖6 所提策略的兩關(guān)節(jié)電機(jī)輸出電流情況Fig.6 Two joints motor current of the proposed strategy

圖7 關(guān)閉快變子系統(tǒng)控制電流后機(jī)械臂轉(zhuǎn)角跟蹤情況Fig.7 Two manipulators’ angle tracking after closing the controlcurrent of fast subsystem
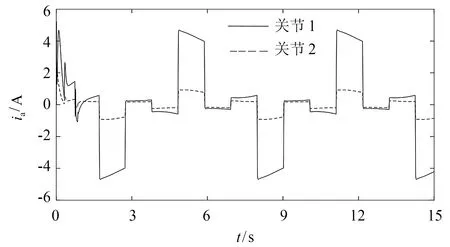
圖8 傳統(tǒng)滑模控制策略的兩關(guān)節(jié)電機(jī)輸出電流情況Fig.8 Two joints motor current of the traditional sliding mode control strategy
由圖5的結(jié)果可以看出,所提的控制策略在系統(tǒng)參數(shù)未知且具有較大的初始誤差的情況下,仍具有較好的跟蹤效果;由圖5、7的對比可以看出,速度差值反饋控制器對柔性振動(dòng)主動(dòng)抑振的效果明顯;由圖6、8的對比可以看出,所提的控制策略可以使輸出信號(hào)變得光滑,說明其很好地克服了傳統(tǒng)滑模控制策略中存在的抖振問題.
4 結(jié)語
研究利用系統(tǒng)動(dòng)量、動(dòng)量矩守恒關(guān)系及第二類Lagrange法,并綜合考慮關(guān)節(jié)驅(qū)動(dòng)電機(jī)特性,建立了基于電機(jī)電流的柔性關(guān)節(jié)空間機(jī)器人系統(tǒng)動(dòng)力學(xué)方程.基于奇異設(shè)動(dòng)理論將系統(tǒng)動(dòng)力學(xué)方程分解為快變子系統(tǒng)和慢變子系統(tǒng),針對快變子系統(tǒng)采用了速度差值反饋控制方案,針對慢變子系統(tǒng)設(shè)計(jì)了基于徑向基神經(jīng)網(wǎng)絡(luò)的全階滑模控制方案.從仿真結(jié)果可以看出,所提控制方案對柔性振動(dòng)主動(dòng)抑制效果明顯,既保留了傳統(tǒng)滑模控制方案的魯棒性,又克服了其存在的抖振問題.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
