基于SolidWorks的手持式花椒采摘器結(jié)構(gòu)設(shè)計(jì)及運(yùn)動(dòng)仿真
2020-01-02 06:38:06黎書文楊海誠(chéng)陸玉雪
貴州農(nóng)機(jī)化 2019年4期
關(guān)鍵詞:設(shè)計(jì)
黎書文,楊海誠(chéng),陸玉雪
(貴州理工學(xué)院 機(jī)械工程學(xué)院,貴州 貴陽 550003)
0 引言
花椒主要種植在丘陵、山坡、岸邊和地頭,花椒產(chǎn)業(yè)已成為特殊區(qū)域農(nóng)民致富新的經(jīng)濟(jì)增長(zhǎng)點(diǎn)[1]。然而花椒采收對(duì)農(nóng)藝要求較高,既不能傷葉、傷芽、傷枝,又要適時(shí)收獲。因其樹枝伸展長(zhǎng)、帶刺且果實(shí)小從而致使采摘十分困難。李斌常等研制了一種簡(jiǎn)單的類似加長(zhǎng)剪刀一樣的工具來采摘高枝處的花椒[2];田文君等人研發(fā)了一種多功能摘花椒機(jī),通過電動(dòng)剪刀的方式實(shí)現(xiàn)花椒采摘[3]。雖然這些機(jī)械在一定程度上保護(hù)了手臂不被劃傷,但其效率仍然較低,而且容易傷及花椒樹本身,造成來年花椒減產(chǎn)甚至花椒樹枝的死亡,再加上沒有自帶收集裝置,使得花椒收集有一定的難度。
本文根據(jù)花椒果實(shí)的特性,設(shè)計(jì)了一種新型的電動(dòng)手持式花椒采摘器,通過對(duì)整機(jī)的采摘裝置、傳動(dòng)裝置以及收集裝置等結(jié)構(gòu)進(jìn)行設(shè)計(jì),為花椒機(jī)械化收獲提供有益參考。
1 總體設(shè)計(jì)方案
1.1 設(shè)計(jì)流程
為了最大限度保證工作質(zhì)量,提高采收效率,根據(jù)已知條件進(jìn)行參數(shù)化設(shè)計(jì),優(yōu)化設(shè)計(jì)結(jié)構(gòu);運(yùn)用SolidWorks中的motion分析功能,模擬其工作原理與過程[4]。總體設(shè)計(jì)流程如圖1所示。
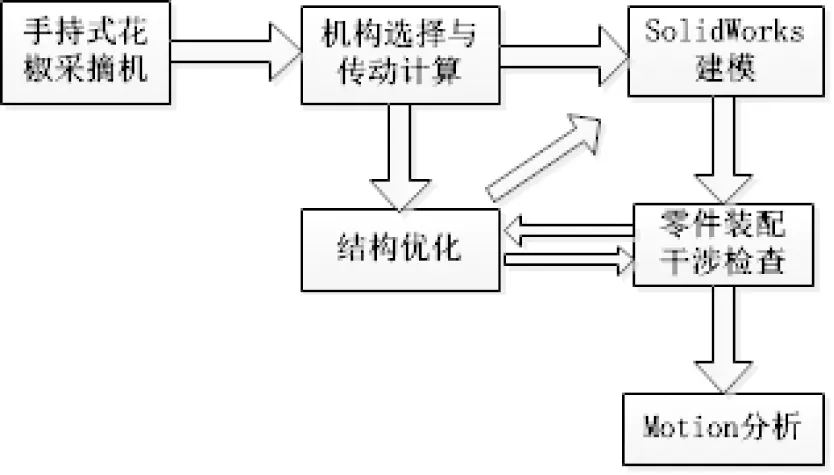
圖1 設(shè)計(jì)流程圖
主要研究?jī)?nèi)容包括:
1)花椒采摘器的總體結(jié)構(gòu)設(shè)計(jì);
2) 關(guān)鍵零部件參數(shù)化設(shè)計(jì)及結(jié)構(gòu)優(yōu)化;
3) 模擬采摘器工作原理及工作過程。
1.2 設(shè)計(jì)方案
本文設(shè)計(jì)的花椒采摘器主要由喂入口、滾筒、機(jī)架、電動(dòng)機(jī)、蝸輪、蝸桿、手柄、刀片、收集盒及其他零部件組成,整體結(jié)構(gòu)如圖2所示。

1.機(jī)架;2.蝸桿;3.滑動(dòng)鋸齒形刀片;4.固定鋸齒形刀片;5.蝸輪 6.滾筒;7.軸承座;8.上殼體;9.萬向節(jié);10.傳動(dòng)軸;11.萬向節(jié);12.電機(jī)架;13.電機(jī);14.電機(jī)架固定板;15.開關(guān);16.手柄;17.銷軸;18.收集盒圖2 花椒采摘器結(jié)構(gòu)示意圖
2 采摘原理分析
該花椒采摘器通過喂入口對(duì)花椒枝條進(jìn)行限位,然后通過滾筒梳刷的作用實(shí)現(xiàn)花椒收獲。具體工作原理如下:電動(dòng)機(jī)輸出動(dòng)力,通過萬向節(jié)9傳遞給傳動(dòng)軸,經(jīng)萬向節(jié)11傳遞給Ⅰ軸,Ⅰ軸通過蝸輪蝸桿將動(dòng)力傳遞給Ⅱ軸,Ⅱ軸上固定有滾筒,滾筒將喂入采摘器的花椒撥向下方的交錯(cuò)滑動(dòng)的鋸齒狀刀片切割區(qū)域;刀片3固定在機(jī)架上,刀片4可沿刀片3水平滑動(dòng),刀片3和刀片4交錯(cuò)滑動(dòng)剪切滾筒梳刷撥下的花椒果實(shí),被剪斷的花椒經(jīng)手柄前端的物料筒落入下方的收集盒內(nèi)。當(dāng)采集的花椒裝滿后,可通過卸載收集盒繼續(xù)采收,從而實(shí)現(xiàn)不間斷作業(yè),提高采收效率[5]。
3 整機(jī)結(jié)構(gòu)設(shè)計(jì)
本裝置選用SolidWorks三維繪圖軟件進(jìn)行產(chǎn)品三維建模,為實(shí)現(xiàn)良好的可裝配性和理想的模型效果,建模過程中盡可能簡(jiǎn)化建模步驟。該電動(dòng)手持式花椒采摘器主要由上、中、下三部分組成。上端為該產(chǎn)品功能執(zhí)行部件,亦是本設(shè)計(jì)的重點(diǎn)內(nèi)容,中間為采摘器的手持結(jié)構(gòu)部分,下端為采摘器的收集裝置[6]。
3.1 采摘頭設(shè)計(jì)
采摘頭即為本裝置的執(zhí)行部分,由機(jī)架、固定鋸齒形刀片、滑動(dòng)鋸齒形刀片、軸承座、滾筒、蝸輪、蝸桿、階梯軸Ⅰ、階梯軸Ⅱ、軸承、萬向節(jié)、傳動(dòng)軸等組成。采摘頭安裝在機(jī)體前端靠近喂入口部位,通過自攻螺釘連接固定。
3.2 手柄設(shè)計(jì)
手柄由前后薄壁外殼和開關(guān)構(gòu)成,前后薄壁面使用自攻螺釘連接,在手柄的食指位置裝有電源開關(guān);其下方設(shè)有一通孔,安裝收集盒時(shí)插入銷軸,另一端插入開口銷以固定收集盒。
3.3 收集盒設(shè)計(jì)
收集盒是一個(gè)上方收口的桶狀復(fù)合曲面外殼,安裝在手柄下方。
3.4 其他零件設(shè)計(jì)
這類零件主要由十字沉頭螺栓、十字沉頭自攻螺釘、螺母、平墊圈、銷軸、開口銷等組成,這類零件屬于標(biāo)準(zhǔn)件,只需合理選型即可。
4 樣機(jī)虛擬裝配
完成上述各零部件的實(shí)體建模后,運(yùn)用SolidWorks的裝配仿真功能中提供的約束關(guān)系實(shí)現(xiàn)產(chǎn)品的虛擬裝配,以便后期進(jìn)行干涉檢查、動(dòng)態(tài)模擬、裝配流程以及運(yùn)動(dòng)仿真等一系列輔助設(shè)計(jì)。
裝配所需要的零部件有機(jī)架、固定鋸齒形刀片、滑動(dòng)鋸齒形刀片、軸承座、滾筒、蝸輪、蝸桿、階梯軸Ⅰ、階梯軸Ⅱ、軸承、萬向節(jié)、傳動(dòng)軸、安裝板、采摘頭、手柄、開關(guān)、收集盒、十字沉頭螺栓4件、十字沉頭自攻螺釘8件、螺母4件、平墊圈4件、銷軸1件、開口銷1件等。
裝配方案順序依次為:1)裝配執(zhí)行部件;2)裝配動(dòng)力驅(qū)動(dòng)部件;3)裝配采摘頭;4)裝配手柄;5)裝配收集盒;6)總裝花椒采摘器。
具體裝配過程如下:
1)裝配執(zhí)行部件:機(jī)架、固定鋸齒形刀片、滑動(dòng)鋸齒形刀片、軸承座、滾筒、蝸輪、蝸桿、階梯軸Ⅰ、階梯軸Ⅱ、軸承、萬向節(jié)1的組裝,如圖3所示。
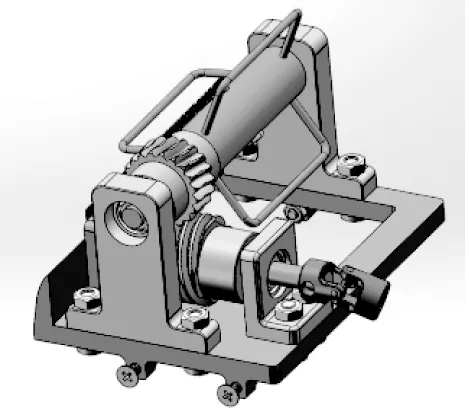
圖3 執(zhí)行部件組裝圖
2)裝配動(dòng)力驅(qū)動(dòng)部件:萬向軸2、電機(jī)、電機(jī)架、用于連接和定位電機(jī)架的安裝板的組裝,如圖4所示。

圖4 動(dòng)力驅(qū)動(dòng)部件組裝圖
3)裝配采摘頭:前后薄壁外殼、執(zhí)行部件、動(dòng)力驅(qū)動(dòng)部件的組裝,如圖5所示。

圖5 采摘頭組裝圖
4)裝配手柄:前后薄壁曲面外殼、開關(guān)的組裝,如圖6所示。

圖6 手柄模型圖
5)裝配收集盒:收集盒、銷軸、開口銷的組裝,如圖7所示。

圖7 收集盒模型圖
6)總裝花椒采摘器,如圖8所示。

圖8 采摘器總裝配圖
5 運(yùn)動(dòng)仿真分析
SolidWorks/Motion是基于Windows環(huán)境的參數(shù)化三維實(shí)體造型軟件,可以對(duì)裝配體進(jìn)行精確模擬和運(yùn)動(dòng)單元分析,Motion分析使用計(jì)算能力強(qiáng)大的動(dòng)力學(xué)求解器,在計(jì)算中考慮到了材料屬性和質(zhì)量及慣性,能夠完成如力、彈簧、阻尼和摩擦等方面的計(jì)算,同時(shí)還能繪制相關(guān)曲線供進(jìn)一步分析。
5.1 采摘器結(jié)構(gòu)分解
生成爆炸圖,如圖9所示。
5.2 工作過程模擬
花椒采摘器的工作過程模擬情況如圖10所示。
6 結(jié)語
本文基于實(shí)施鄉(xiāng)村振興戰(zhàn)略和助力打贏脫貧攻堅(jiān)的背景,結(jié)合花椒采摘特點(diǎn),設(shè)計(jì)了一種電動(dòng)手持式花椒采摘裝置,有效地節(jié)省了人力和時(shí)間成本,提高了采摘效率,實(shí)現(xiàn)了機(jī)械化采摘,后期將繼續(xù)對(duì)實(shí)體樣機(jī)進(jìn)行調(diào)試以達(dá)到最佳效果。

圖9 裝配體爆炸圖

(a)滑動(dòng)刀片位移圖解

(b)滑動(dòng)刀片速度圖解
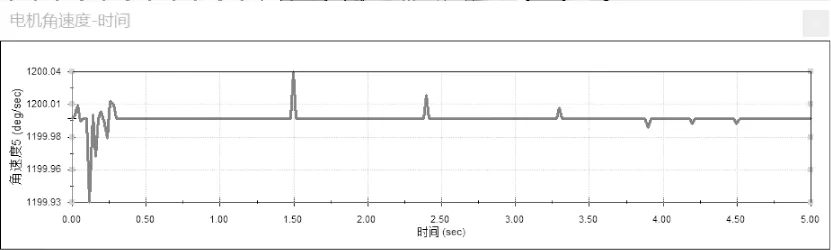
(c)驅(qū)動(dòng)電機(jī)角速度圖解

(d)滾筒角速度圖解圖10 花椒采摘機(jī)工作過程模擬圖
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
