基于微孔參數(shù)優(yōu)化的超流體陀螺噪聲抑制方法
2020-01-07 08:20:18程龍閱
中國慣性技術(shù)學(xué)報 2019年5期
關(guān)鍵詞:測量
鄭 睿,余 童,程龍閱
(1.安徽師范大學(xué) 物理與電子信息學(xué)院,蕪湖 241002;2.安徽省智能機器人信息融合與控制工程實驗室,蕪湖 241000)
陀螺儀的精度直接影響慣性導(dǎo)航系統(tǒng)的精度[1-3]。基于薩格納克干涉效應(yīng),物質(zhì)波干涉式陀螺儀是新型的超高精度的陀螺儀[4-5]。超流體陀螺是物質(zhì)波干涉式陀螺儀的一種,其測量精度預(yù)期可達10-10rad/(s?Hz1/2)的數(shù)量級,將來可以應(yīng)用于航天、宇航、深海探測等領(lǐng)域[6-9]。
陀螺儀的精度與其噪聲有密切相關(guān)的聯(lián)系。研究表明,在不考慮環(huán)境干擾的情況下,超流體陀螺內(nèi)部存在熱能量、薄膜位移檢測系統(tǒng)的誤差等噪聲源,引起其輸出端產(chǎn)生數(shù)量級為 10-8~10-7rad/(s?Hz1/2)的近似白噪聲[10],這嚴(yán)重影響了超流體陀螺的測量精度,因此需要開展超流體陀螺噪聲抑制的方法研究。
超流體物質(zhì)波是基于超流體在弱連接處發(fā)生約瑟夫森效應(yīng)而產(chǎn)生的。因而在超流體陀螺的結(jié)構(gòu)中,存在很多的微孔組成的微孔陣列,這也被稱為弱連接。Sato等[11]在實驗中發(fā)現(xiàn),隨著微孔孔徑、微孔數(shù)量等參數(shù)的變化,超流體陀螺的噪聲也發(fā)生了變化。由此可以表明改變微孔參數(shù)可以抑制超流體陀螺的噪聲。但是,當(dāng)前對于該問題的認(rèn)識仍處于實驗階段,微孔參數(shù)與超流體陀螺噪聲之間的數(shù)學(xué)模型尚不清楚[6]。
本文在分析了超流體陀螺噪聲的基礎(chǔ)上,構(gòu)建微孔參數(shù)與超流體陀螺噪聲之間的數(shù)學(xué)模型,提出基于微孔參數(shù)優(yōu)化的超流體陀螺噪聲抑制方法,從改變陀螺結(jié)構(gòu)參數(shù)的角度對其噪聲進行抑制,從而挖掘超流體陀螺高測量精度的潛力。
1 超流體陀螺的噪聲分析
超流體陀螺的結(jié)構(gòu)如圖1所示,是由圖中虛線內(nèi)的超流體干涉儀、溫度控制系統(tǒng)、化學(xué)勢能差驅(qū)動系統(tǒng)、位移檢測系統(tǒng)、幅值控制系統(tǒng)構(gòu)成的。其中超流體干涉儀是敏感角速度的核心部件,其它是輔助超流體干涉儀工作系統(tǒng)。
圖1 超流體陀螺結(jié)構(gòu)圖Fig.1 Structure of superfluid gyroscope
圖1中,超流體干涉儀中虛線所示的環(huán)形腔內(nèi)充滿超流體4He,“×”的位置表示數(shù)千個微孔組成的陣列,當(dāng)微孔孔徑d滿足如式(1)所示的關(guān)系時為弱連接[6]。

式中,4ξ表示弱連接的臨界孔徑,T表示當(dāng)前溫度,λT≈2.1716K表示超流體4He的臨界溫度。利用熱阻1加熱,弱連接兩側(cè)產(chǎn)生溫度差和壓力差,由此產(chǎn)生化學(xué)勢能差。在化學(xué)勢能差的作用下,超流體在弱連接處發(fā)生約瑟夫森效應(yīng),產(chǎn)生兩路超流體物質(zhì)波(若微孔孔徑d不滿足式(1),此時微孔陣列是強連接,則不能在化學(xué)勢能差的作用下發(fā)生約瑟夫森效應(yīng))。這兩路物質(zhì)波可以表示為:

式中,I1和I2為流過1號弱連接和2號弱連接的超流體的質(zhì)量流量,Ic1和Ic2分別為I1和I2的幅值,Δφ1和Δφ2表示兩個弱連接兩側(cè)的相位差。
根據(jù)圖1可以看出,總流量I是I1和I2的疊加,因此總流量將同樣以正弦變化,其幅值Im為[6]:

式中,Δφe= Δφ1- Δφ2表示超流體相移,它由薩格納克相移Δφs(角速度矢量 引起)和熱相移Δφh(熱阻2的加熱引起)共同組成[6]:

由式(3)(4)可知,外界角速度變化會引起超流體相移變化,從而使得超流體流量變化。因此檢測超流體流量即可測量角速度,這就是超流體陀螺測量角速度的原理。由于超流體的約瑟夫森效應(yīng)會引起薄膜位移變化,因此薄膜位移也呈現(xiàn)正弦變化,其幅值xm為:

式中,fJ為約瑟夫森頻率,ρ為超流體密度,Ad為薄膜表面積。
根據(jù)文獻[10]的研究,熱能量、溫度控制系統(tǒng)的輸出波動、化學(xué)勢能差驅(qū)動系統(tǒng)的輸出波動、幅值控制系統(tǒng)的誤差、位移檢測系統(tǒng)的噪聲是超流體陀螺噪聲的主要來源。而對超流體陀螺影響最大的是位移檢測系統(tǒng)的噪聲,因此位移檢測系統(tǒng)的噪聲被視為超流體陀螺的主要噪聲源。
設(shè)位移檢測系統(tǒng)噪聲為δxmn,由式(4)和式(5)可知,角速度測量值Ωd與xm之間存在著非線性關(guān)系,利用非線性隨機變量方差的求解方法,由δxmn引起dΩ的噪聲Ωdn為:

由式(4)(6)可得,超流體陀螺的噪聲Ωdn為:

根據(jù)通用的參數(shù)[10],超流體陀螺的噪聲為10-8~10-7rad/(s?Hz1/2)的數(shù)量級。超流體陀螺預(yù)期的測量精度是可以達到10-10rad/(s?Hz1/2)數(shù)量級的。因此輸出噪聲較高,使得其高測量精度的潛力不能發(fā)揮,這是超流體陀螺需解決的主要問題。
2 微孔參數(shù)與超流體陀螺噪聲之間的數(shù)學(xué)模型

圖2 弱連接處微孔陣列的示意圖Fig.2 Aperture arrays at the weak link
由圖2可以看出,微孔孔徑越大、微孔數(shù)量越多,就可使得Ic越大,從而抑制超流體陀螺噪聲。但由于微孔參數(shù)與超流體陀螺噪聲之間的定量關(guān)系還不清楚,因此本文首先研究微孔孔徑d以及微孔數(shù)量N與超流體流量幅值Ic的關(guān)系,構(gòu)建微孔參數(shù)與超流體陀螺噪聲之間的數(shù)學(xué)模型,在此基礎(chǔ)上進一步研究抑制的效果。
2.1 微孔孔徑與微孔流量幅值之間的關(guān)系
由于超流體流過單一微孔的速度幅值vc為[6]:

式中,κ4=h/m4,h是普朗克常數(shù),m4是4He原子質(zhì)量。那么流過單一微孔的超流體質(zhì)量流量幅值Ic0為:

式中,ρs表示超流體中超流性成分的密度,a表示微孔面積。式(9)表示出微孔孔徑與微孔流量幅值之間的關(guān)系。
為了使得Ic變大,單一微孔中的Ic0也應(yīng)該變大,由式(9)可知,微孔孔徑d應(yīng)取最大值。由式(1)可知,d的最大值dmax=ξ4。把微孔孔徑用其最大值代替,由式(9)可得:

式(10)表明,當(dāng)微孔孔徑取最大值時,可以使得Ic0達到最大值。
2.2 微孔數(shù)量與微孔流量幅值之間的關(guān)系
在弱連接兩側(cè)存在化學(xué)勢能差的情況下,超流體在弱連接處的每個微孔處發(fā)生約瑟夫森效應(yīng):

式中,I(1),I(2),…,I(N)表示流過1號微孔、2號微孔、N號微孔的超流體的質(zhì)量流量;Δφ(1),Δφ(2),…,Δφ(N)表示每個微孔兩側(cè)的超流體相位差。
由圖2可知,流過1號弱連接的流量I1是由流過所有微孔的流量之和,即

但在超流體陀螺中,熱噪聲始終存在。受到熱噪聲影響,Δφ(1),Δφ(2),…,Δφ(N)上面疊加了白噪聲,因此它們是相互獨立的隨機變量。為精確研究Ic與N的關(guān)系,必須考慮熱噪聲的影響。
因此利用復(fù)數(shù)表示式(12)中各正弦量,比如,Icsin(Δφ)表示為Ic∠Δφ,Ic0sin(Δφ(1))表示為那么式(12)的復(fù)數(shù)形式為:

根據(jù)復(fù)數(shù)的運算知識,式(13)等號左邊復(fù)數(shù)的模為Ic,為計算式(13)等號右邊所描述的復(fù)數(shù)的模,對式(13)等號右邊所描述的復(fù)數(shù)采用代數(shù)式表示:

式中,j表示復(fù)數(shù)算子(j2=-1)。式(13)等號左右兩邊的復(fù)數(shù)的模應(yīng)相等,因此由式(14)可得:


式(16)表示微孔數(shù)量與Ic之間的關(guān)系。由式(16)可以看出,Ic隨著N的增大而增大。
2.3 微孔參數(shù)與陀螺噪聲之間數(shù)學(xué)模型的構(gòu)建
基于上述研究,把式(9)(16)代入式(7)可得,超流體陀螺噪聲與微孔孔徑、微孔數(shù)量之間的關(guān)系為:
由式(17)可知,隨著微孔孔徑和微孔數(shù)量的增加,超流體陀螺輸出噪聲將逐漸減少,因此增大微孔孔徑和微孔數(shù)量對超流體陀螺的噪聲有抑制效果。
根據(jù)式(10)可知,微孔孔徑的最優(yōu)值是其最大值ξ4。由于超流體陀螺的管路受到尺寸的限制[12],因此微孔數(shù)量也是要受到限制的,設(shè)其最優(yōu)值也是其最大值,設(shè)為Nmax。把微孔陣列參數(shù)的最優(yōu)值代入式(17),可得此時超流體陀螺的噪聲達到最小值Ωdn(min)為:
式(18)是微孔陣列參數(shù)取最優(yōu)值時,超流體陀螺噪聲的數(shù)學(xué)模型。
3 仿真與分析
為驗證基于微孔參數(shù)優(yōu)化的超流體陀螺噪聲抑制方法的有效性,利用超流體陀螺仿真實驗平臺,開展實驗與分析。首先分析微孔參數(shù)的變化范圍,研究在微孔參數(shù)的變化范圍陀螺噪聲的變化規(guī)律;接著選擇輸入為典型的角速度,在取通用微孔參數(shù)和最優(yōu)微孔參數(shù)兩種情況下,分別對角速度測量值誤差進行分析。
3.1 仿真實驗平臺
超流體陀螺仿真實驗平臺的結(jié)構(gòu)如圖3所示。在該實驗平臺中,基于大量的實驗數(shù)據(jù),在計算機上模擬超流體干涉儀的工作過程,這部分的主要環(huán)節(jié)包括熱驅(qū)動模塊、熱相移輸入模塊、角速度敏感模塊和薄膜位移產(chǎn)生模塊等幾個部分。超流體陀螺的相移控制系統(tǒng)則由硬件實現(xiàn),包括角速度信息提取模塊、高精度反饋熱相移處理電路和熱相移控制電路等部分。實驗平臺中各部分之間的關(guān)聯(lián)如圖3中箭頭指向所示。
圖3 超流體陀螺仿真實驗平臺結(jié)構(gòu)框圖Fig.3 Structure of superfluid gyroscope simulation experimental platform
3.2 微孔參數(shù)變化范圍內(nèi)噪聲的變化規(guī)律
基于上述實驗平臺,實驗的基本參數(shù)設(shè)置為:
① 微孔孔徑[6]:取工作溫度為T=2.1712K,根據(jù)式(1)可知在該溫度下dmax=95 nm。另外,由于微孔孔徑最小可以為 50 nm,因此設(shè)置微孔孔徑的變化范圍為50 nm到95 nm。
② 微孔數(shù)量:弱連接處的微孔必須大于一定數(shù)量,否則流過弱連接的超流體流量較少,使得薄膜位移過小而無法被檢測到。當(dāng)前微孔數(shù)量最小為 2500個。受到超流體管路尺寸的限制,微孔的數(shù)量也不能很大,當(dāng)前報道的微孔數(shù)量最多為5625個[6]。
除了微孔參數(shù),其它相關(guān)參數(shù)設(shè)置為:
③ 結(jié)構(gòu)參數(shù)[6]:超流體管路半徑Rc=2×10-2m,θ= 0,薄膜面積為Ad=5×10-5m2。
④ 工作參數(shù)[6]:工作溫度為T=2.1712K,約瑟夫森頻率為fJ=1000 Hz,超流體相移Δφe的鎖定值設(shè)置為π/2,系統(tǒng)的測量帶寬為1000 Hz。
⑤ 噪聲源[10]:位移檢測系統(tǒng)噪聲δxmn=10-15m/Hz1/2;
基于上述參數(shù),根據(jù)式(17)可得在微孔孔徑和微孔數(shù)量的變化范圍內(nèi),超流體陀螺的噪聲變化規(guī)律如圖4所示。
由圖4可以看出,隨著微孔數(shù)量由2500增加到5625,微孔孔徑由50 nm增加到95 nm,超流體陀螺的噪聲從超流體陀螺的噪聲由6.3×10-7rad/(s?Hz1/2)逐漸減小為7.7×10-8rad/(s?Hz1/2),因此超流體陀螺的噪聲呈現(xiàn)逐漸下降的趨勢。由此表明增大微孔孔徑和增加微孔數(shù)量可以有效抑制超流體陀螺噪聲。因此為抑制超流體噪聲,微孔孔徑和微孔數(shù)量應(yīng)盡可能取較大的值。
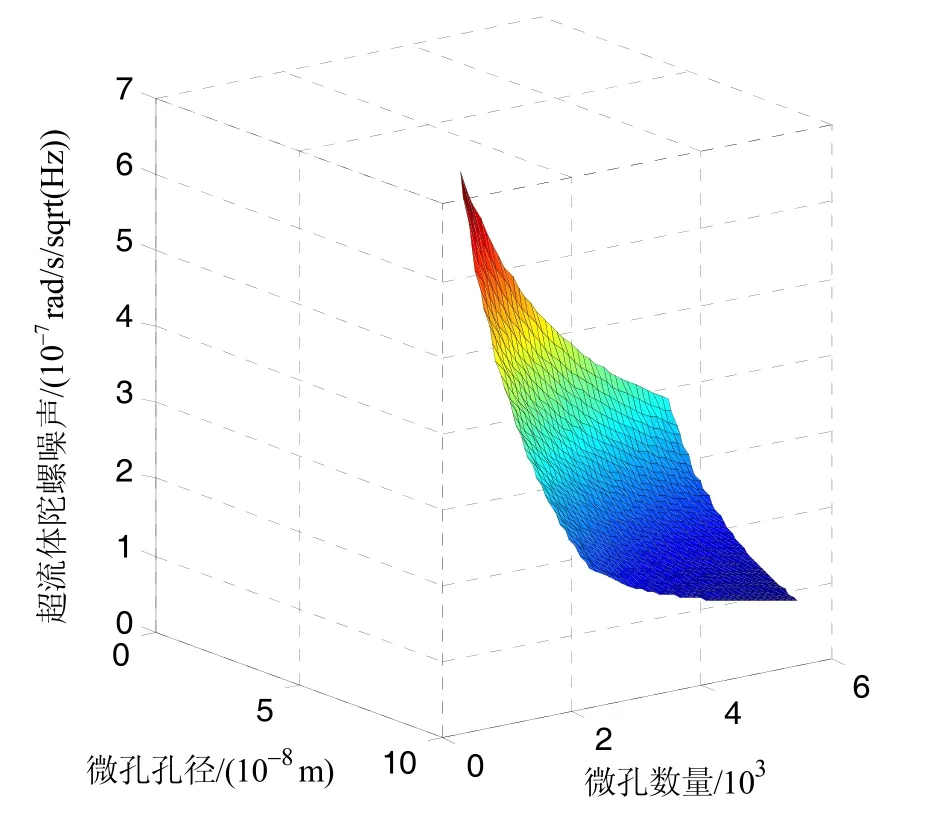
圖4 微孔陣列參數(shù)對超流體噪聲的影響曲線Fig.4 Curve of Influence on superfluid gyroscope noise with aperture array parameters
3.3 兩種典型輸入角速度情況下噪聲的抑制效果
為進一步研究微孔陣列對超流體陀螺噪聲的抑制效果,在兩種典型輸入角速度情況下,取通用微孔參數(shù)和最優(yōu)微孔參數(shù),觀察超流體陀螺的噪聲情況。實驗參數(shù)設(shè)置為:
① 通用微孔參數(shù):根據(jù)3.2節(jié)的研究可知,微孔孔徑的變化范圍為50 nm到95 nm微孔數(shù)量的變化范圍為2500到5625。在國內(nèi)外的研究中,最為常見的一組參數(shù)是:微孔孔徑為70 nm,微孔數(shù)量為4225,如文獻[8]、文獻[10]和文獻[11]都選擇的是這組數(shù)值,因此本文把這組參數(shù)稱為通用微孔參數(shù)。微孔孔徑為70 nm,微孔數(shù)量為4225;
② 最優(yōu)微孔參數(shù):根據(jù)上文分析可知,微孔孔徑取最大值95 nm,微孔數(shù)量取最大值5625,這時的微孔參數(shù)達到最優(yōu);
③ 輸入角速度Ω設(shè)置為兩種典型的類型:第一種是恒定角速度,Ω=2×10-6rad/s;第二種是正弦輸入,Ω=2×10-5sin(2πt) rad/s。仿真時間為 1 s。
④ 其它參數(shù)同3.2節(jié)中的設(shè)置。
根據(jù)上述參數(shù)模擬超流體陀螺的工作過程,可得兩種典型輸入角速度情況下角速度測量值、角速度測量值的誤差如圖5~8所示。
由圖5可知,角速度恒定的情況下:超流體陀螺輸出的角速度測量值存在隨機波動的噪聲。而取最優(yōu)微孔參數(shù)時,噪聲波動的幅度要小于取通用微孔參數(shù)時。進一步由圖6中的數(shù)據(jù)精確分析可知,取通用微孔參數(shù)時,角速度測量值誤差的標(biāo)準(zhǔn)偏差為5.7×10-8rad/(s?Hz1/2),由于統(tǒng)計時間是 1s,此時超流體陀螺的噪聲是5.7×10-8rad/(s?Hz1/2);取最優(yōu)微孔陣列參數(shù)時,角速度測量值誤差的標(biāo)準(zhǔn)偏差為 2.8×10-8rad/(s?Hz1/2),在1 s的統(tǒng)計時間下,超流體陀螺的噪聲為 2.8×10-8rad/(s?Hz1/2),是取通用微孔陣列參數(shù)時的約1/2。
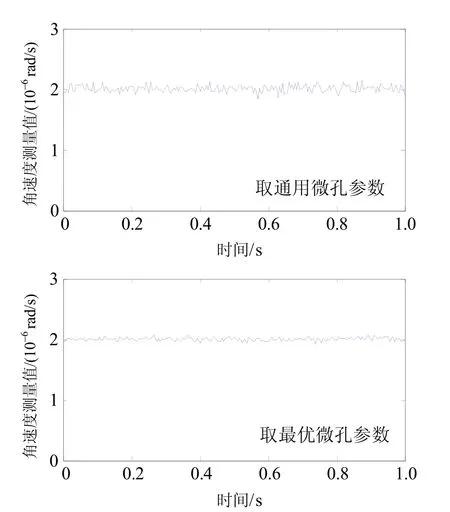
圖5 角速度測量值(角速度恒定)Fig.5 Curve of superfluid gyroscope detecting value(the angular velocity is constant)

圖6 角速度測量值的誤差(角速度恒定)Fig.6 Curve of superfluid gyroscope detecting value error (the angular velocity is constant)
由圖7可知,角速度正弦變化的情況下,超流體陀螺輸出的角速度測量值在正弦變化的基礎(chǔ)上疊加了隨機噪聲。同樣,取最優(yōu)微孔參數(shù)時,噪聲波動的幅度要小于取通用微孔參數(shù)時。由圖8中的數(shù)據(jù)分析可知,由于此時的角速度是時變的,通過超流體陀螺仿真實驗平臺的解算,角速度測量值誤差的標(biāo)準(zhǔn)偏差比測量恒定角速度時要大一些,約為9.2×10-8rad/(s?Hz1/2)。在1 s的統(tǒng)計時間里,超流體陀螺的噪聲為 9.2×10-8rad/(s?Hz1/2)。采用最優(yōu)微孔陣列參數(shù),角速度測量值誤差的標(biāo)準(zhǔn)偏差約為4.7×10-8rad/(s?Hz1/2)。在1 s的統(tǒng)計時間內(nèi),超流體陀螺的噪聲為4.7×10-8rad/(s?Hz1/2),也是取通用微孔陣列參數(shù)時的約1/2。

圖7 角速度測量值(角速度正弦變化)Fig.7 Curve of superfluid gyroscope detecting value (the angular velocity is sinusoidal change)

圖8 角速度測量值的誤差(角速度正弦變化)Fig.8 Curve of superfluid gyroscope detecting value error(the angular velocity is sinusoidal change)
根據(jù)以上分析可知,采用最優(yōu)微孔陣列參數(shù),在角速度恒定和角速度時變兩種典型情況下,超流體陀螺的噪聲得到了有效抑制。
4 結(jié) 論
為了使得超流體陀螺能發(fā)揮其高測量精度的潛力,提出了基于微孔參數(shù)優(yōu)化的超流體陀螺噪聲抑制方法。由分析結(jié)果可知,隨著微孔孔徑和微孔數(shù)量的增加,超流體陀螺的噪聲逐漸減小。
微孔孔徑最大只能達到弱連接的臨界孔徑。受到超流體管路尺寸的限制,微孔數(shù)量也只能在一定范圍之內(nèi)。通過對微孔參數(shù)變化范圍的研究,當(dāng)前最優(yōu)的陣列參數(shù)是:微孔孔徑為95 nm,微孔數(shù)量為5625。基于最優(yōu)微孔參數(shù),超流體陀螺的噪聲被抑制為取通用參數(shù)(微孔孔徑為70 nm,微孔數(shù)量為4225)時的1/2,超流體陀螺的測量精度得到了顯著提高。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
