全光纖聲光調制徑向跳動差分測量技術研究
2020-01-16 06:44:00曹泉泉王輝林宋華峣秦正健張守宇
激光技術 2020年1期
曹泉泉,王輝林,宋華峣,秦正健,張守宇
(山東理工大學 儀器科學與技術系,淄博 255049)
引 言
跳動誤差指被測實體表面繞基準軸線連續回轉時所允許的最大跳動量。在生產加工中,軸類零件的徑向跳動會引起機器振動、噪聲增大等影響[1]。目前國內對主軸徑向跳動測量方法大多使用千分尺或者是三坐標測量機等,人工操作不僅效率低而且誤差較大,而三坐標測量機尺寸較大,使用成本高[2]。隨著當前傳感器技術,尤其是光電類傳感器的發展,軸類零件的徑向跳動測量開始由原先的接觸式測量逐步轉變為智能化的非接觸式測量[3]。目前的非接觸檢測法有激光位移傳感器測量和基于機器視覺的CCD面陣測量法等[4-5]。本文中提出一種基于激光測量的全光纖光路測量方法,利用聲光效應布喇格衍射產生兩級測量光形成光外差檢測法,具有抗干擾能力強、穩定性好的優點,理論上有較高的測量精度。
1 測量系統設計
1.1 測量基本原理
測量示意圖如圖1所示。激光通過光纖透鏡耦合的測量探頭照射在被測軸的表面,組成了反射式光纖位移傳感器的形式[6]。轉動軸在工作狀態下的徑向跳動會在光路的2維平面內形成位移差Δs,其速度變化表示為vs,由于測量距離的變化,入射光和反射光發生多普勒頻移現象[7],vs通過光路的頻移轉化為混頻器中的電信號,再經過電信號的處理即可換算為軸的徑向跳動量。
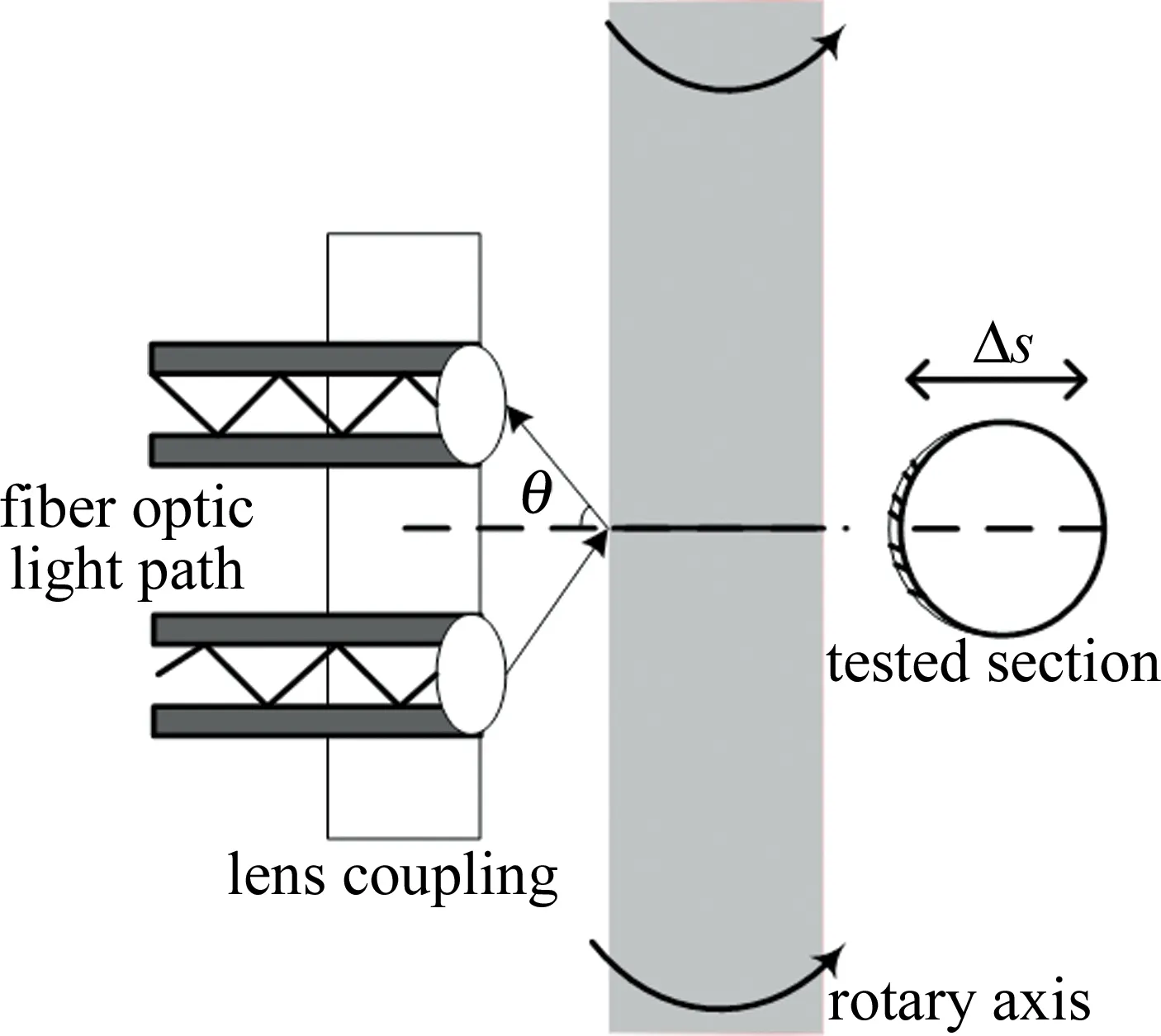
Fig.1 Measurement diagram
1.2 聲光全光纖光路的應用
為解決測量前激光測量光路需要大量調試的問題,在全部測量光路上使用光纖進行光路的傳導,在測量裝置前端的光路準直性較好,所以激光器和光纖的耦合采用直接耦合的方式,布喇格盒與光纖選擇透鏡耦合的方式[8-10],將0級光和-1級光分別耦合到兩個光纖光路,示意圖如圖2所示。
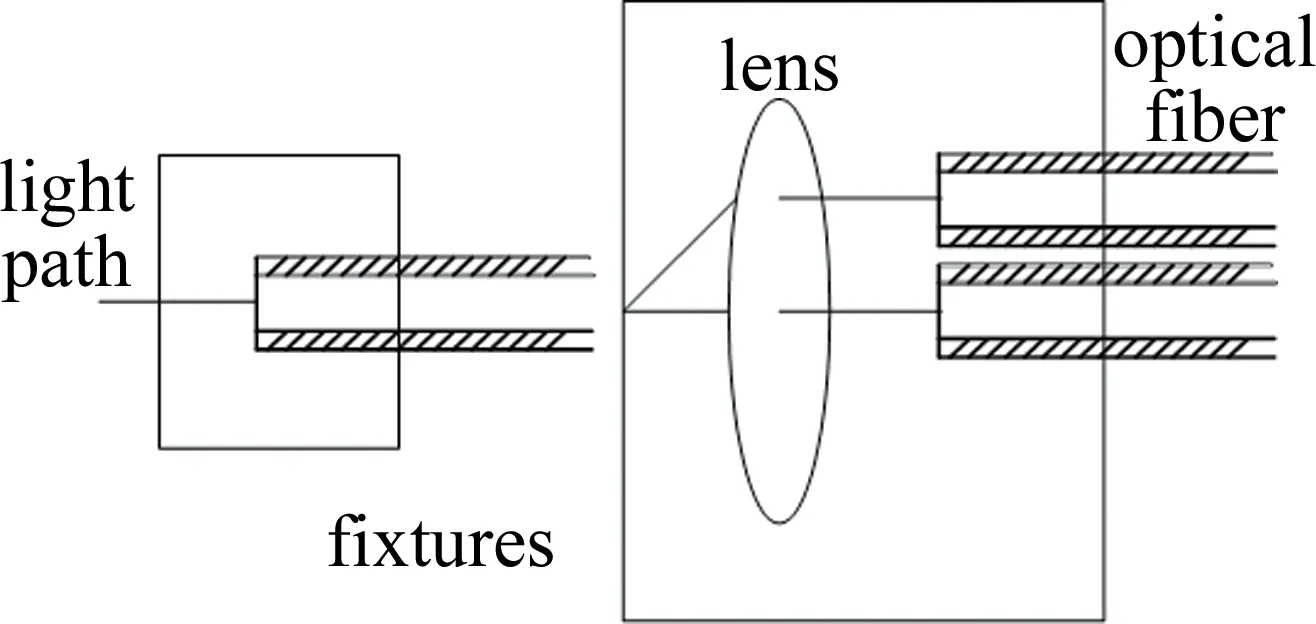
Fig.2 Direct coupling and lens coupling

激光器產生的激光頻率為fr的激光束,直接耦合到光纖,經全反射后再進入布喇格盒,調整布喇格晶體角度產生只有0級光fr和-1級光fm的布喇格衍射,再經過透鏡耦合的方式分別進入兩路單模光纖[12-13],示意圖如圖3所示。此種設計降低了空氣光路中的外界光干擾。耦合裝置與布喇格盒相對固定,只需調整晶體的角度改變入射角即可得到布喇格衍射[14],降低了調試難度,提高了測量效率。
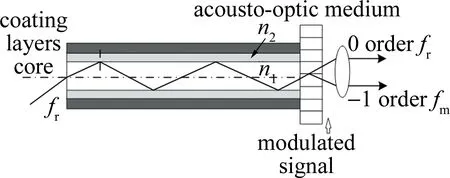
Fig.3 Fiber Bragg diffraction
1.3 總體測量模型建立
采用SO2000型聲光器件,大量的聲光實驗表明,采用100MHz的調制頻頻率可以得到輸出較為穩定的布喇格衍射[15],所以本系統的調制頻率fb=100MHz。
總體測量原理如圖4所示。為實現同一軸線上的差動測量,0級光fr經分光器后分為fr,1和fr,2兩束光作為參考光;布喇格衍射后-1級光fm經分光器后分為fm,1和fm,2兩束光作為測量光,其通用表達為fm=fr-fb,fb為聲光調制頻率;測量光經過光纖透鏡耦合射出,在被測面經散射后得到兩束散射光fm,1′和fm,2′,其通用表達為fm′=fm±fD,fD為轉軸上的多普勒頻移[16]。
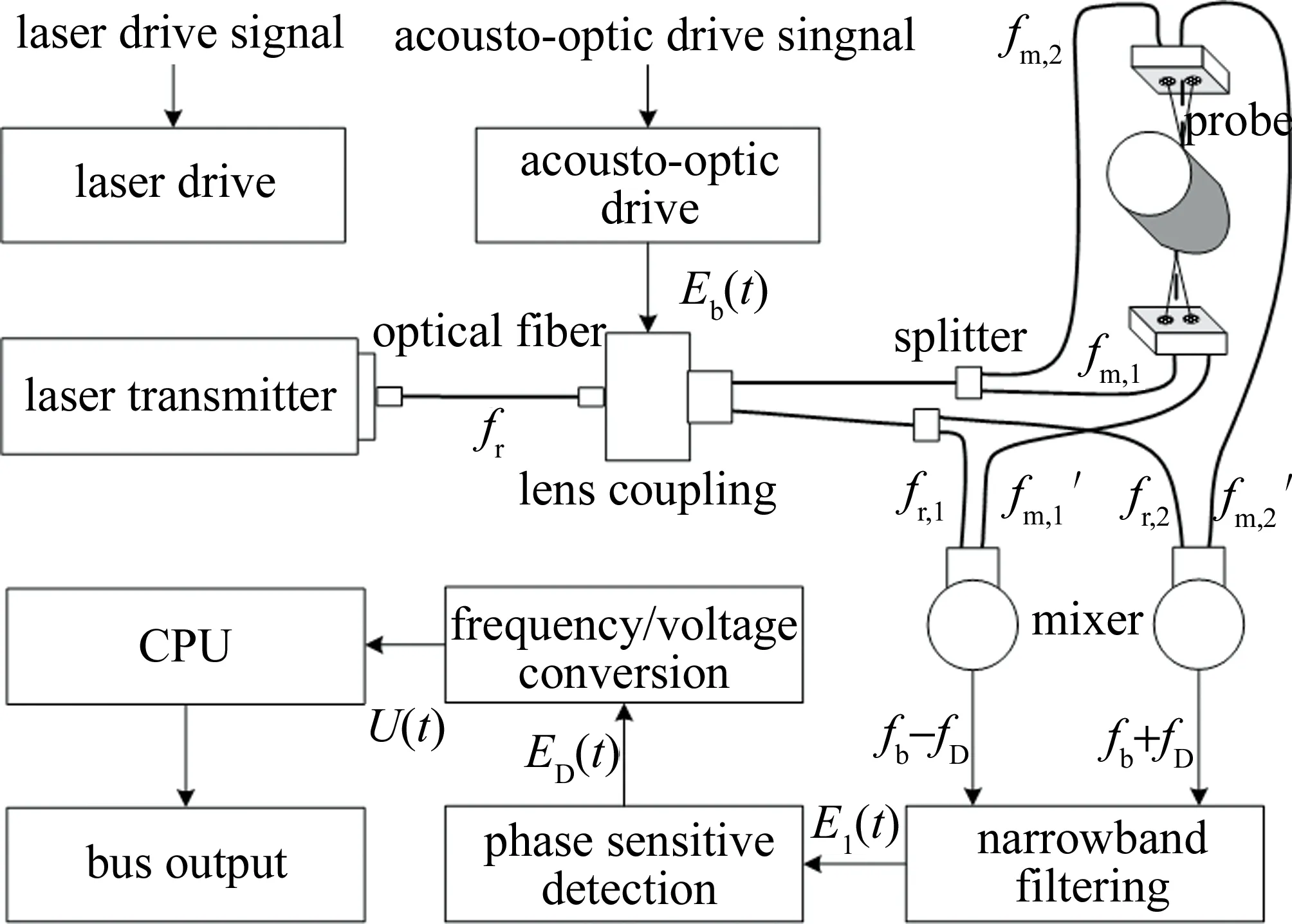
Fig.4 Overall measurement principle
根據激光多普勒測速原理可得:
fD=2vscosθ/λ
(1)
式中,θ為反射光線和物體垂直方向的夾角。兩路散射光經光纖透鏡采集后分別進入兩個光電探測器和參考光混頻[17-18]:根據混頻原理,可以響應的頻率Δf為參考光的頻率和散射光頻率之差,即:
Δf=fr-fm′=fr-fm±fD=
fr-(fr-fb)±fD=fb±fD
(2)
式中,fb-fD和fb+fD分別為兩路差分頻移。
具體的混頻推導為:參考光fr和反射測量光fm′照射到以雪崩二極管為核心的探測器上,兩路光的初相位分別為φ1和φ2,其合成電場強度為:
E=E1cos(2πfrt+φ1)+E2cos(2πfm′t+φ2)
(3)
由于雪崩二極管的非線性特性,場強的混頻展開式E(t)為:
E(t)=k0+k1E+k2E2=
k0+k1E1cos(2πfrt+φ1)+k1E2cos(2πfm′t+φ2)+
k2E12cos2(2πfrt+φ1)+k2E22cos2(2πfm′t+φ2)+
k2E1E2cos[2π(fr+fm′)t+(φ1+φ2)]+
k2E1E2cos[2π(fr-fm′)t+(φ1-φ2)]
(4)
式中,k0,k1,k2是與光電探測器有關的常數。激光器的頻率數量級為1014,光電探測器無法響應這樣的高頻,因此頻率成分為fr,fm′和fr+fm′的均無法響應,再使用電容隔去直流分量,因此探測器輸出E1(t)僅為:
E1(t)=k2E1E2cos[2π(fr-fm′)t+(φ1-φ2)]
(5)
可以看出,上式就是(2)式所表示的Δf的交變信號。將上式簡寫為:
E1(t)=A1cos(2πΔft+Δφ)
(6)
由(2)式可知,Δf為調制信號和多普勒頻移的和差項,用相敏檢波器將多普勒頻移從調制信號Eb(t)=Abcos(2πfb+φb)中選出,其中Ab為調制信號幅值,φb為調制信號相位,即:
E0(t)=E1(t)Eb(t)=A1cos(2πΔft+Δφ)·
Abcos(2πfb+φb)=

(7)
使用低通濾波器濾除高頻項,最終的多普勒頻移項ED(t)為:
ED(t)=ADcos(2πfDt+φD)
(8)
式中,AD=A1Ab/2,φD=Δφ-φb。將(8)式經頻率/電壓轉換可得電壓為:U(t)=K·fD,其中K轉換系數。把fD代入(1)式可得:
(9)
積分得徑向跳動量:
(10)
由上式,對頻壓轉換的電壓值取積分運算即可得到一路位移量。兩路差動信號的最終徑向跳動量Δx=(|Δs1|+|Δs2|)/2;在同一軸線上的兩路數據取其平均值Δx即為徑向跳動值。
2 實驗和不確定度分析
2.1 實驗分析
徑向跳動的現場測量是檢測垂直于軸徑方向上的位移峰峰值Δs。為了檢驗系統的測量精度,選取特魯斯T-20跳動測量儀和設計的測量系統進行對比實驗。為了先驗證全光纖測量光路聲光調制理論本身的測量精度,使用單測量頭對一主軸多個截面進行測量,結果如表1所示。
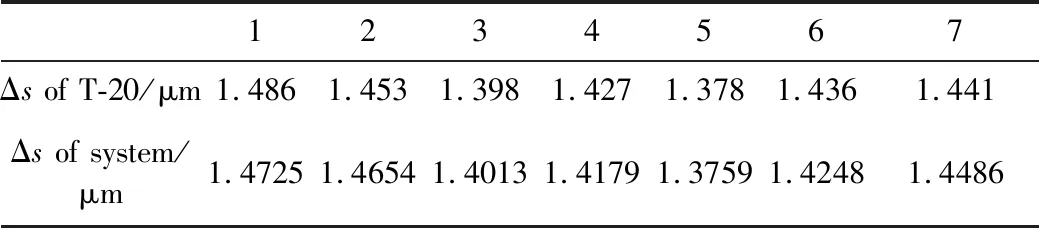
Table 1 Comparison of single measurement head

(11)
上述實驗中得出使用單測量頭對7個截面分別測量,平均跳動誤差為1.4295μm,和跳動測量儀的相對誤差為0.1258%。
因為使用全光纖光路的優越性,在現場實驗可以容易做到同一軸線上的差分測量,這是傳統空氣光路難以做到的。在理論上是可以消除測量系統的共模干擾。使用雙測量頭差分測量結果如表2所示。
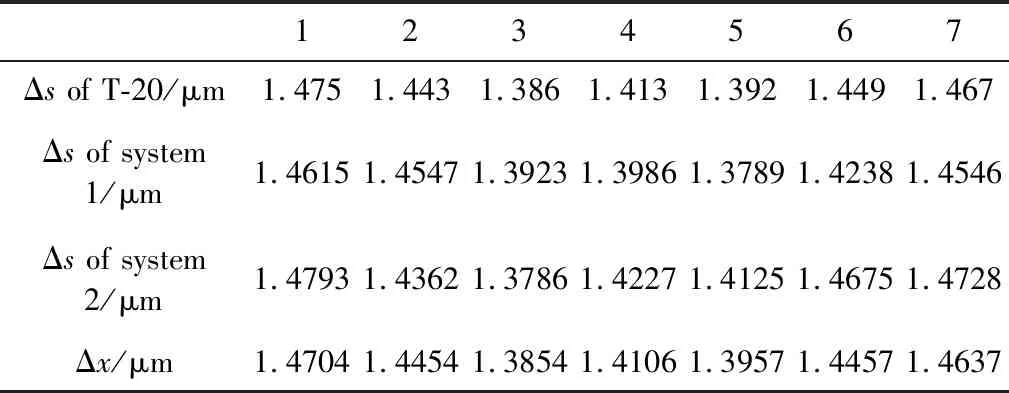
Table 2 Comparison of dual-probe differential measurement results
使用雙探頭差分測量的徑向跳動平均跳動量Δx=1.4309μm,相對誤差為0.0838%,相對誤差減小了0.042%。上述數據表明,雙探頭差分測量的方法可以顯著提高測量精度,使測量的相對誤差小于0.1%,達到了系統設計的要求。
2.2 不確定度評定[19-20]
2.2.1 激光光源引起的不確定度u(λ) 本系統中采用632.8nm波長的He-Ne激光器,光纖中聲光調制的光波穩定性小于0.05%,用矩形分布估計其不確度為3.45×10-4。
2.2.2 夾角θ引起的不確定度u(θ) 在進行數據處理時假定在耦合透鏡處的入射光線和反射光線與傳感器振動方向的夾角不變。實際上由于距離原因,該夾角在(θ-Δθ)~(θ+Δθ)之間變化,最大誤差限為0.06%,用三角分布可估算其不確定度為2.45×10-4。
2.2.3 光電探測器引起的不確定度u(d) 本系統中選擇的雪崩二極管光電探測器的波長范圍為600nm~1200nm,擴展不確定度為0.09%,置信概率p=99%,包含因子k=2.576,所以可得由光電探測器導致的標準不確定度為3.12×10-4。
2.2.4 信號處理過程引起的不確定度u(i) 使用全光纖光路和聲光調制使系統信噪比得到有效的改善,經實驗驗證這一部分產生的誤差實驗測量得電路產生的誤差不高于0.05%,用正態分布估計其不確定度為1.67×10-4。
2.2.5 外界因素引起的不確定度u(o) 由于系統受到外界溫度、濕度、振動噪聲等干擾,實驗結果表明,這部分誤差總體小于0.08%,用正態分布估計其不確定度為2.67×10-4。
因此,合成標準不確定度為:
0.06129%<0.1%
(12)
由此可得系統的不確定度小于0.1%,達到設計要求。
3 結 論
在對徑向跳動測量進行了一系列的理論推導后,設計了測量系統并進行了實驗。實驗的橫向對比和縱向對比均表明,系統可以進行實用高效的徑向跳動檢測。相較于其它激光類測量裝置,全光纖光路的使用大大提高了光路傳輸效率,提高了測量精度;光外差法測量原理的靈活運用也使系統達到了納米級的測量精度;利用光纖的幾何形狀易于調整的特性,在光路測量終端提出同一軸線上的差分測量方法,抑制了系統本身的共模干擾,進一步地提高了測量信噪比。實驗和不確定度評定表明,系統可以進行高精度、非接觸式的納米級徑向跳動測量,在生產加工現場的應用有廣闊的前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
