考慮人車交互的兩相位信號控制交叉口行人專用相位設置條件
2020-01-17 07:15:40王嘉文楊曉芳董潔霜
公路交通科技 2020年1期
王嘉文,陳 超,金 楊, 楊曉芳,董潔霜
(1.上海理工大學 管理學院,上海 200093;2.上海市公安局交通警察總隊,上海 200070)
0 引言
常規兩相位信號控制交叉口的每個相位均存在人車交互行為,如人車相互避讓,減速讓行等。這些交互行為導致行人與機動車通行延誤增加,甚至避讓失效時會進一步升級為人車交通事故,造成人身傷亡和經濟損失[1]。合理設置的行人專用相位可完全消除兩相位信號控制交叉口的人車交互區域,以略微提升延誤為代價保證了行人過街安全[2]。在我國,自《道路交通安全法》(以下簡稱新交規)于2013年1月1日修訂后,轉彎車輛需讓行交叉口正常通行行人。該法規進一步保證了信號控制交叉口的行人安全,也導致人車交互行為模式明顯的改變,影響了發生人車交互時產生的延誤。在部分城市,新交規發布后機動車服從率未達到100%[3-4],過街行人有概率讓行機動車。即使是在同一個城市,由于交叉口設施、環境的影響等因素,人車交互行為亦存在變化[5-6]。由于人車交互時行人避讓車輛或車輛避讓行人時產生的交通參與者總延誤估計方法不同,亟需研究不同人車交互行為下行人專用相位設置條件,通過估計并比較不同方案下交通參與者的總延誤,更合理地選擇交叉口信號控制模式。
行人專用相位(Exclusive Pedestrian Phase,EPP)是指信號控制交叉口所有機動車進口道均顯示為紅燈信號,使行人可以同時在所有方向(包括對角線)穿越交叉路口的相位[7]。針對行人專用相位的研究可以總結為優化安全性與優化通行效率兩類[8]。在安全方面,許多研究認為,行人專用相位消除了機動車與行人之間的所有交互,因此有助于提高信號控制交叉口安全性能[9]。而在通行效率方面,馬萬經等[8]提出了一種包括交叉口行人專用相位和傳統行人相位的多目標優化模型及其優化行人相位模式的求解算法。模型能夠根據交叉口車輛的交通情況和行人運動確定當前最佳行人相位模式以提高交叉口運行效率。Hediyeh[10]做了更細致的研究,分析了步態參數受行人性別、年齡、群體大小、人行橫道長度及行人信號指示的影響,從微觀層面了解了行人的步行機制的變化和各種行人和交叉口特征的影響。韓印等[11]分析了行人流隨機消散和集中消散特征的差異性,運用隨機分布理論推導出右轉車輛穿越行人流延誤模型,得到車輛與行人交互行為時的平均延誤。綜合效率與安全因素,此前有諸多研究[12-13]深入分析了行人專用相位的設置條件,但大多數研究沒有深入考慮人車交互行為因素。
不同人車交互行為將影響行人專用相位實施效果[12]。國內外學者研究發現交通環境因素[14-16]、行人因素[1, 10, 17]、機動車輛因素[15, 18]等均會影響信號控制交叉口人車交互行為。而人車交互行為會直接影響信號控制交叉口交通模型(包括通行能力估計模型、延誤估計模型等)[17,19],進而會改變行人專用相位的設置條件。對人車交互行為的分析方面,胡宏宇等[20]基于視頻圖像處理技術分析了信號交叉口人車交互行為中交互行為的辨識方法,陸斯文等[21]基于人車沖突和微觀碰撞機理建立了行人過街的危險度評價指標。本研究則在上述學者研究基礎上,運用交叉口視頻數據分析交叉口人車交互行為,作為信號控制交叉口模型的輸入條件之一。
綜上,目前國內外積累了行人專用相位研究成果,提出了考慮安全性能、通行效率等方面的行人專用相位優化方法。然而,通行效率方面的研究中,大多以機動車、行人的效率指標(如延誤、通行能力)或二者的組合優化為優化目標,沒有充分考慮我國交通環境中以人為本的重要訴求;并且在模型中鮮有考慮我國各地人車交互行為的巨大差異,使得模型在我國不同城市的應用存在一定的誤差。
本研究在以下兩點內容補充了既有研究內容:(1)在行人專用相位設置條件中,創新地采用交通參與者總延誤(按照每一名交通參與者計算總人×小時)作為優化目標,以體現擬設行人專用相位交叉口對交通參與者的公平性要求;(2)在交通參與者總延誤估計模型中,考慮人車交互行為中行人避讓機動車、機動車避讓行人行為在不同城市、不同交叉口的差異性,引入了避讓率因素,從而在不同人車交互行為環境下更準確地給出是否設置行人專用相位的建議值。最后,建立數值仿真模型與微觀交通仿真模型,分析不同人車交互環境下設置行人專用相位條件的靈敏度及其應用效果,從而驗證本研究成果的有效性以及可用性。
1 人車交互模型
1.1 定義
兩相位信號交叉口中,通常右轉車輛不受信號控制。行人通行時,左轉車輛將同時放行。行人在綠燈相位時間內通行過程中將與轉彎車輛產生持續性人車交互,每個進口道有3個人車交互區,以四進口道交叉口為例,總計有12個人車交互區,如圖 1所示。
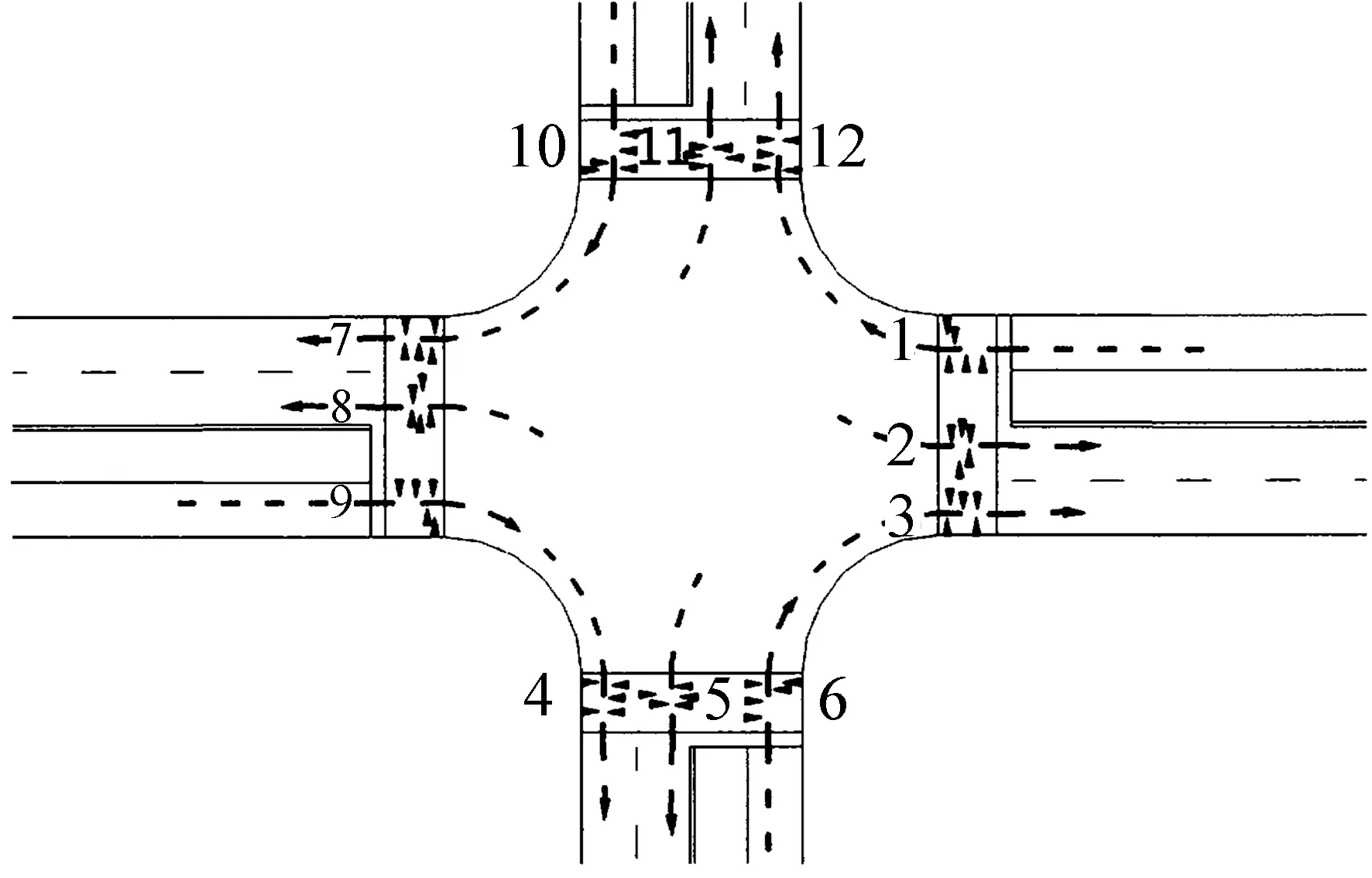
圖1 四進口道兩相位信號控制交叉口人車交互區Fig.1 Pedestrian-vehicle interaction region at two-phase signalized intersection with 4 entrances
在每個人車交互區會產生不同類型的人車交互行為。根據此前學者的研究[1, 22]以及本研究的信號控制交叉口建模需求,將按照以下原則分析人車交互行為:(1)因行人通行造成的機動車減速、停車、變換車道等行為記為車輛避讓行人一次;(2)因機動車通行導致行人擔心自身安全,因而后退或止步記為行人避讓車輛一次;(3)行人綠燈信號時間內,行人因等待穿越車輛間隙,而在車道邊止步記為行人避讓車輛一次;(4)當一個行人在同向多條車道上分別發生多次人車交互現象時,視每次交互具體情況分別記錄避讓行為類型;(5)當一輛機動車與沿人行橫道方向的多人在同一個人車交互區發生避讓行為時,視其交互具體情況記錄具體的避讓行為類型。
依據上述原則,本研究引入了人車交互避讓率這一變量,以支持行人專用相位設置條件中交通參與者總延誤的計算。
1.2 人車交互避讓率
兩相位信號控制交叉口中,當行人在行人信號綠燈相位過街時會與轉彎機動車產生交互,必然有一方會避讓另一方讓對方先行,故避讓行為分為車輛避讓行人與行人避讓車輛。定義車輛避讓行人的次數與人車交互總次數的比值為車輛避讓率,行人避讓車輛的次數與人車交互總次數的比值為行人避讓率。
車輛避讓率Kc的計算公式為:
(1)
式中,Nkc為車輛避讓行人行為次數;M為人車交互總次數。
行人避讓率Kp的計算公式為:
(2)
式中Nkp為行人避讓車輛的次數。
上述兩個變量將影響行人專用相位在道路交叉口的適用性,需要在設置行人專用相位前充分調研計算。
2 交通參與者總延誤估計模型
本研究中,主要考慮交通參與者總延誤這一指標,從通行效率角度給出行人專用相位的設置條件。因此首先需要建立兩相位信號控制交叉口交通參與者總延誤估計模型。
2.1 假設條件
(1)本研究中暫不考慮飽和或過飽和條件下的兩相位信號控制交叉口。針對研究對象,假設車輛到達服從泊松分布。
(2)根據本研究采集的人車交互區視頻數據觀測,發現行人避讓機動車時機動車依舊會減速,而機動車避讓行人時,鮮見行人停下來(偶爾有加速通過現象)。據此,本研究假設機動車避讓行人時行人不產生延誤,行人避讓機動車則二者均產生延誤。
(3)由于考慮設置行人專用相位的交叉口多位于人流量較大的城市核心區或大型活動場館等區域,往往少有的貨運車輛通行,故本研究中所建模型車輛構成包含小汽車和大客車(含公交車)。
2.2 延誤估計模型及行人專用相位設置條件
通過交叉口的交通參與者總延誤分為兩部分,一部分是機動車內乘客的延誤,另一部分是過街行人的延誤。本研究將對設置行人專用相位前后,交通參與者總延誤的變化進行建模分析。
未設置行人專用相位時,行人延誤包括信號控制交叉口帶來的控制延誤與人車交互時產生的延誤;車輛延誤包括控制延誤與人車交互時產生的延誤。
(3)
(4)
式中,C為信號周期長度;g為有效綠燈時間;X為飽和度。

(5)

本研究在王駿燁等[23]學者的研究基礎上,推導出人車交互中機動車的延誤dV的估計方法:
(6)
式中,L為人車交互時機動車減速位置的長度;V0為發生交互時機動車的初速度;a為機動車減速時的加速度(該項取正值)。
(2)信號控制交叉口行人控制延誤d信為:
(7)
式中,r為行人禁行時間,r=C-g。
人車交互時,行人延誤d轉i為:
(8)
式中,qi為轉彎車流i的流率;τ為行人通過的最小間隔時間;t為綠燈間隔時間。
(9)
得到以上數據后,可得設置行人專用相位前,通過交叉口的交通參與者總延誤D1為:
(10)
式中,Np為行人流量;α為行人安全系數,此系數可隨行人的重要程度的提高而增大;Nc為機動車流量;M為觀測時間內,設置專用相位前行人過街時人車交互數;Kc為車輛避讓率;Kp為行人避讓率;k為機動車平均載客數;dV1,dV2分別為車讓人、人讓車兩種條件下,人車交互中機動車的延誤。
設置行人專用相位的交叉口消除了人車交互區,行人延誤包括信號控制交叉口的控制延誤,車輛延誤包括信號交叉口的控制延誤與等待行人專用相位時間產生的延誤。
(11)
式中g專為行人專用相位時間。
設置行人專用相位后,并規定行人必須在行人專用相位內通行,所有通過交叉口的交通參與者總延誤D2為:
(12)
從通過交叉口所有通行者的總延誤角度分析,設置行人專用相位的條件為:
D2<δD1,
(13)
式中,D1為設置行人專用相位前交通參與者總延誤;D2為設置行人專用相位后交通參與者總延誤;δ為調整系數,δ≥1,考慮到設置行人專用相位帶來的安全性能的提升,應允許延誤的小幅提升。其中,δ的取值因結合工程實踐與模型靈敏度分析結果給出。本研究將在靈敏度分析部分討論δ的取值方法。
綜上所述,當D2≤δD1時,交叉口可以設置行人專用相位,當D2>δD1時,不推薦設置行人專用相位。
3 數值分析
3.1 人車交互行為回歸分析
因不同交叉口人車交互行為特征存在差異,本研究將基于人車交互區視頻數據,采用回歸分析方法對不同交叉口的人車交互次數、行人流量、機動車流量間的關系展開研究。
回歸模型表達式為:
M=A+BNp+CNc,
(14)
式中,M為人車交互次數;Np為行人流量;Nc為機動車流量;A,B,C為回歸模型的各項參數。
本研究以上海市北京路-常德路交叉口人車交互視頻為例,以車流量、人流量為變量指標,建立行人車輛交互次數回歸預測模型。該交叉口為兩相位信號控制交叉口,本研究以常德路南、北進口為研究對象,基于在平峰期隨機抽樣的4 h人車交互區視頻數據,記錄了每次人車交互行為發生時的5 min內行人與機動車流量。在隨機抽樣數據中,人流量以5 min計分布于34~63人區間內(均值為52人);車流量以5 min計分布于42~67輛區間內(均值為51輛),二者均近似泊松分布;期間共觀測到了183次人車交互。在上述案例條件下,應用回歸分析建立交互次數與車輛及行人通過量的線性模型,回歸分析得出表達式:
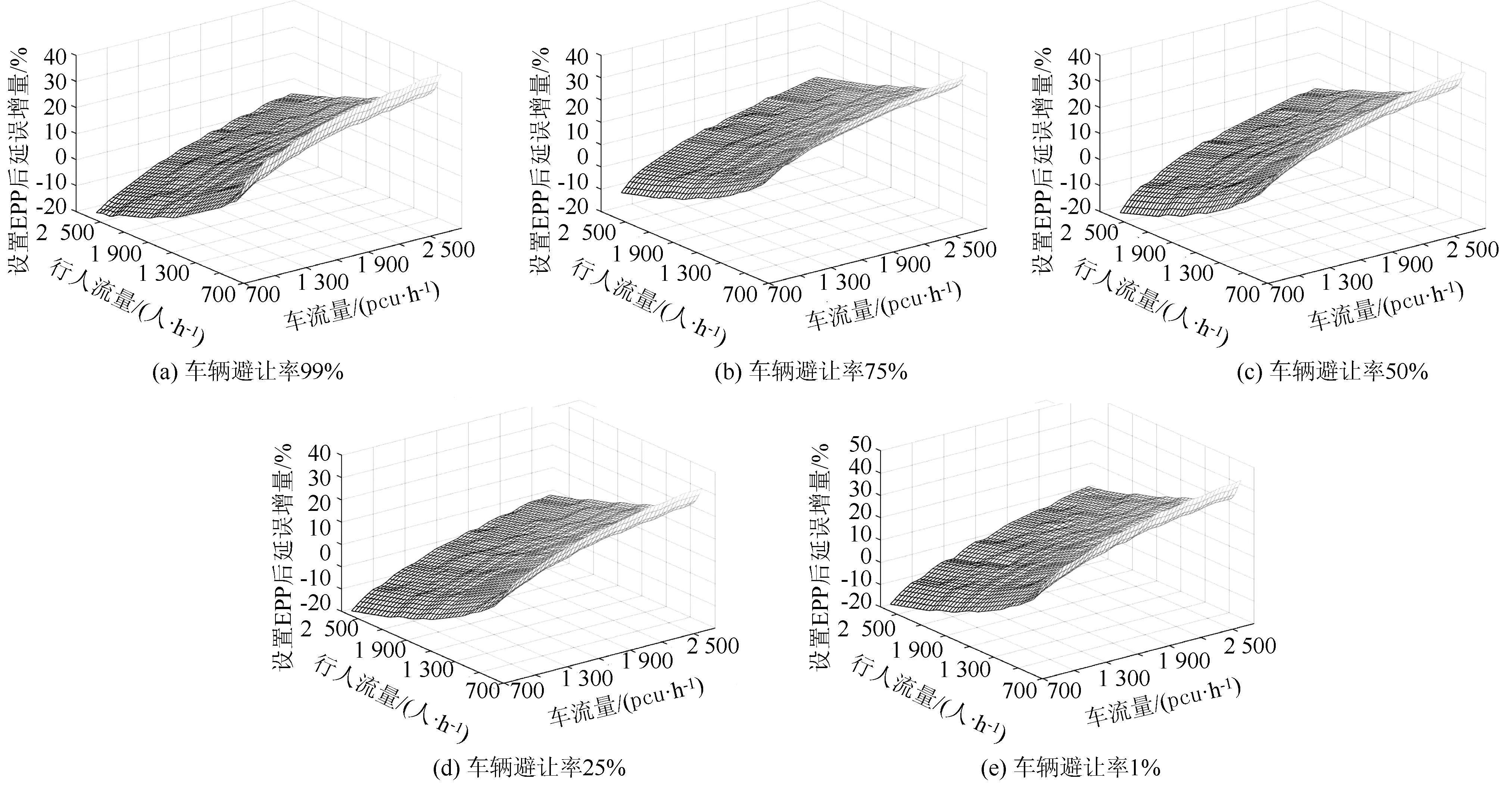
圖2 不同避讓率條件下模型靈敏度分析Fig.2 Model sensitivity analysis at different avoidance rates
(15)
經檢驗,模型的擬合優度R2值為0.976,表明考慮了人車數量的交互次數模型預測結果擬合較理想。對模型的總體性進行F檢驗(見表1),F值為743.3,顯著程度參數sig為0,表明行人車輛交互行為與人流車流量的關系可以近似為線性關系。對各項參數進行T檢驗(見表2),機動車流量的顯著程度為0,行人流量的顯著程度為0.03,常數項的顯著程度為0.52,表明機動車流量、行人流量及常數項可以在該案例條件下估計北京路-常德路交叉口的人車交互次數,驗證了本方法在小型兩相位信號控制交叉口平峰期低流量條件下的適用性。

表1 模型總體檢驗表

表2 模型參數檢驗表Tab.2 Table of parametric test
在183次人車交互中,有27次行人避讓機動車,156次機動車避讓行人。根據式(1)和式(2)可以得出北京路-常德路交叉口行人的避讓率為15%,車輛的避讓率為85%。
3.2 靈敏度分析
為了分析本研究提出模型中各參數的靈敏度,按照應用要求分別設置模型中各項參數。在本次靈敏度分析中,討論不同行人機動車流量下,設置行人專用相位后交通參與者總延誤變化。本研究分析了車輛完全避讓行人(車輛避讓率99%)、大多數車輛避讓行人(車輛避讓率75%)、人車避讓率相當(車輛避讓率50%)、大多數行人避讓車輛(車輛避讓率25%)、車輛完全不避讓行人(車輛避讓率1%)5種情況,如圖2所示。
從上述分析中本研究得出以下結論:
(1)在機動車流量相同時,行人流量越多,設置行人專用相位后延誤增量越小,更具備設置條件。
(2)車輛避讓率越高,設置行人專用相位后延誤增量越小。說明避讓率對交叉口交通參與者總延誤具有較大影響,本研究將避讓率作為模型變量是重要的。
為了確定式(13)中調整系數δ在不同工況下的取值,本研究分析了調整系數δ取值對行人專用相位設置條件的影響。
圖3展示了調整系數δ取1~1.2的情況,可以看出在各類避讓率條件下,δ取值越大均使得推薦設置行人專用相位的流量范圍有所擴展。基于本研究分析結果,在實際工程應用中,建議在商業區等人流密集交叉口取值1.15~1.2偏重人流安全;在住宅區、休憩場所附近的交叉口取值1.05~1.15兼顧效率與安全;在工業區、郊區的交叉口取值1~1.05偏重效率。

圖3 調整系數取值分析Fig.3 Analysis of adjustment factor value
4 仿真驗證
使用車輛完全避讓行人,避讓比例99%的情況進行VISSIM仿真檢驗。仿真場景以上文所示的典型兩相位信號雙向四車道交叉口為例,在兩個場景中分別進行仿真。由于設置行人專用相位后,行人可進行對角線過街,故輸入行人流量與不設置行人專用相位時不同。各方向流量輸入如表3所示。
在VISSIM中建立路網,東西向次路為南北向主路讓行,車輛為行人讓行。對于每一個仿真場景,分別選取5種不同的隨機數種子進行5次仿真試驗,以降低結果的隨機影響。在以上兩個場景中分別進行仿真檢驗,仿真結果如表4所示。
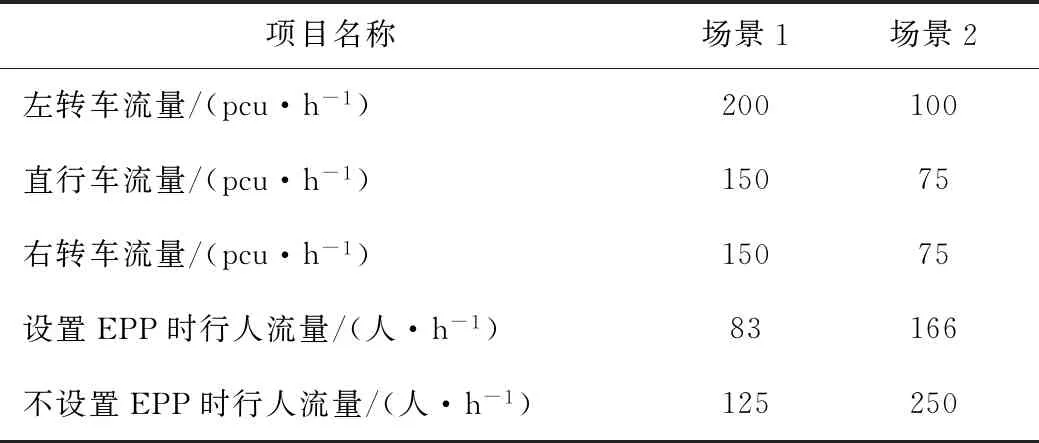
表3 流量輸入表Tab.3 Table of traffic volume input

表4 場景1仿真結果表Tab.4 Simulation result of test scenario 1
場景1交叉口在設置行人專用相位后,機動車內乘客延誤增加,機動車排隊長度增加,行人延誤降低,交叉口交通參與者的總延誤增加,可見在場景1交叉口設置行人專用相位是不合理的。
場景2交叉口在設置行人專用相位后,機動車內乘客的延誤增加,機動車的通過量增加,行人延誤降低,行人的通過量增加,交叉口交通參與者的總延誤降低。在本例中,總延誤降低了4%左右,此結果與靈敏度分析中結果相符,表明在場景2設置行人專用相位是合理的,證明了本研究提出的行人專用相位設置條件的模型有效性。
5 結論
文章研究了兩相位信號控制交叉口人車交互時的避讓行為,提出了避讓率概念;建立了考慮避讓率的交通參與者總延誤估計模型,以設置行人專用相位前后的交通參與者總延誤變化作為指標,并給出設置條件;進而基于人車交互區視頻數據回歸分析了人車交互次數與機動車、行人流量的關系,估計避讓率;并對不同避讓率下的行人專用相位設置效果進行靈敏度分析,針對不同城市區域分別給出設置條件。本研究分析結果表明當機動車流量不變時,行人流量越高設置行人專用相位效果越好,且避讓率會影響設置行人專用相位效果,將避讓率納入行人專用相位設置的輸入條件十分重要。最后,建立了微觀交通仿真模型,驗證了本研究提出的行人專用相位設置條件的有效性。在本研究考慮的交通參與者總延誤之外,交叉口通行能力及安全性能亦是行人專用相位設置條件的重要影響因素,未來將基于行人專用相位交叉口視頻數據,進一步研究調整系數的確定方法,給出同時考慮安全、效率的行人專用相位設置條件。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少先隊活動(2021年4期)2021-07-23 01:46:22
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40