視覺分神對駕駛員跟馳行為的影響
2020-01-17 07:15:44鄭志曉李鵬輝胡孟夏李一兵
公路交通科技 2020年1期
鄭志曉,李鵬輝,胡孟夏,李一兵
(清華大學 汽車安全與節能國家重點實驗室,北京 100084)
0 引言
在“人-車-路”閉環系統中,駕駛員處于核心地位。道路交通事故統計表明,駕駛員因素是引發交通事故的主要原因[1]。駕駛員在駕駛過程中需實時監控道路環境、操控車輛,從而需要調用大量的視覺資源。因此,當駕駛員的視覺通道資源被與駕駛無關的任務占據時,駕駛員的行車安全最受威脅[2]。駕駛員處于視線離開路面的狀態時 (Eye off Road)被認為處于視覺分神狀態[3],屬于駕駛員分神的4種模式之一[4]。
視覺分神會損害駕駛員的行車效能,增加事故風險。Yan等[5]的研究表明,行車過程中發短信會導致青年駕駛員車速波動增大、車輛橫向位置波動增大、跟車距離增大。Anttila等[6]采用了替代性次級任務(Surrogate In-Vehicle Information Systems, S-IVIS ) 研究了視覺分神對駕駛員駕駛表現的影響,指出視覺分神會使駕駛員誤操作頻率增加以及事故風險增加。Holahan等[7]通過駕駛模擬器進行了相關試驗,指出視覺分神會使駕駛員反應時間增加。馬艷麗等[8]通過實車試驗,對駕駛員在使用車載信息系統時(動作分神)的駕駛表現進行了分析,指出交通環境和車載信息系統操作對駕駛員手離開轉向盤的時間和制動操作差錯具有顯著影響。Engstr?m等[3]通過駕駛模擬試驗指出,視覺分神會增加駕駛員的換道錯誤率。Lamble等[9]對追尾沖突的數據進行分析后發現,視覺分神會導致駕駛員的平均制動時間延遲0.5 s, 增大事故風險。Zwahlen等[10]認為當駕駛員單次視線離開路面的時間超過2.0 s,且連續保持4次以上時,發生交通事故的可能性極大;且駕駛員發生事故的可能性隨著駕駛員單次視線離開路面的時間和駕駛員視線離開路面的頻率增大而提高。Bruce等[11]研究發現,駕駛員單次視線離開路面存在一定的安全閾值,對于普通駕駛員,該安全閾值為2.0 s;研究也發現,事故風險與駕駛員單次視線離開路面的時間呈正相關關系。Liang 等[12]對100輛車的自然駕駛數據進行分析后,也驗證了事故風險與駕駛員視線離開路面的時間呈正相關關系。Wilde[13]認為當駕駛員面臨事故風險時,會對自己的駕駛行為采取一些補償措施,常見的措施有降低跟車速度[14-16]、增加跟車時距或跟車距離[14-16]、停止接聽電話、與乘車人交談等次級任務[15]、頻繁換道[15]、提前把腳移到制動踏板處以縮短腳從油門踏板移動到制動踏板的時間[17]以及制動時增加制動力度[18]等,該補償措施可視為駕駛員在駕駛任務和次級任務中做出的事故風險平衡舉措。
上述的研究對駕駛員在行車過程中處于視覺分神狀態時的一些駕駛表現和危險應對能力進行了分析,但關于何種程度的視覺分神會影響行車效能,以及上述影響在不同交通環境(如車速)下是否一致,鮮有研究。本研究分別分析在不同的車速環境下,駕駛員處于不同程度的視覺分神狀態時的駕駛行為及其補償措施,討論視覺分神對行車安全的影響,可為涉及視覺分神的車載設備設計及相關交通法規的制定提供理論基礎。
1 試驗設計與數據采集
1.1 試驗儀器與試驗過程介紹

圖1 駕駛模擬器Fig.1 Driving simulator
本次試驗在清華大學駕駛仿真試驗平臺(如圖1所示)上完成,并配備使用德國SMI公司生產的ETGTM的眼鏡式眼動儀。試驗通過駕駛仿真試驗平臺采集駕駛員的駕駛數據(采樣頻率為60 Hz),通過眼動儀采集駕駛員的眼動數據(采樣頻率為30 Hz)。清華大學汽車安全與節能國家重點實驗室的駕駛仿真試驗平臺(如圖1所示)由實時場景成像系統、六自由度駕駛平臺、三維視覺系統、數據采集系統等組成。5個分別位于前、后、左右的顯示屏能夠給駕駛員提供水平36°、垂直30°的后視空間和水平200°、垂直50°的前視空間,能夠逼真地顯示實車試驗的駕駛場景。被試駕駛員根據所提供的交通場景,依主觀判斷做出相應的行車決策,然后通過轉向盤、制動踏板、加速踏板等操縱機構操縱車輛,數據采集系統將實時記錄車輛的運行狀態參數。
本次試驗用Multigen Creator 和 Scenery Creator 軟件生雙向四車道城市道路場景(圖2)及雙向四車道的高速公路場景(圖3)。城市道路場景包含寬3.7 m的自行車道、寬3.7 m的人行道和寬3.5 m的行車道,各車道線寬0.2 m,雙黃實線間寬1.0 m,符合國家城市公路車道線設計標準。考察城市道路長35 km, 每隔3 km有由紅綠燈控制的十字路。該城市道路場景限速為50 km/h。高速公路包含寬3.75 m的行車道和寬3.0 m的緊急車道,車道線寬0.2 m,中央隔離帶寬2.0 m,符合國家高速公路車道線設計標準。考察高速公路路段長200 km,限速為60~100 km/h。所有場景的路面均為瀝青路面,路面平直,環境效果設置為白天,天氣晴朗。場景中還包括其他車輛、交通標志、道路標線、樹木等各種道路景觀。該城市道路場景為60 km/h,前車車速為50 km/h。高速公路限速為60~100 km/h,前車的車速為90 km/h。

圖2 城市道路場景Fig.2 Urban road scenario

圖3 高速公路場景Fig.3 Expressway scenario
本次試驗數據來自30位熟練駕駛員,性別包含男女,年齡范圍為20~60歲(平均值為32歲,標準差為9.70歲,駕齡不少于2 a,駕駛里程不低于10 000 km)。考慮到駕駛員視力對試驗結果影響的可能性,本次試驗所有被試駕駛員視力均滿足散光在100°以下、矯正視力在5.0以上的條件;此外,所有駕駛員身體狀況良好,無暈車經歷。所有被試駕駛員在試驗開始前將在駕駛模擬器上試駕10 min,以適應駕駛模擬器的操作。
本試驗要求被試駕駛員分別在城市道路及高速公路直線路段跟車駕駛,駕駛的同時根據語音提示完成所給的次級駕駛任務,如圖4所示。該次級駕駛任務模擬車載信息系統與駕駛員的互動方式而設計[9],以實現誘導駕駛員視線離開路面的目的。次級任務被設計為3個難度等級,難度等級越高,駕駛員單次視線離開路面的時間越長(不同視覺分神等級的單次視線離開路面的時間統計見表1),則駕駛員分神程度越高。次級任務擺放的位置如圖5所示。試驗過程中,每次次級任務出現5組同等級的任務,每組任務持續7.0 s,因此每次次級任務持續35.0 s。每個試驗場景駕駛員重復試驗兩次。
1.2 數據處理
用箱圖法觀測和剔除數據樣本中的離群值,提高數據分析的準確性。
箱圖法離群值的判斷方法為:確定樣本總體的第25個百分位數(第1個四分位數Q1)、第50個百分位(第2個四分位數Q2)、第75個百分位(第3個四分位數Q3)以及四分位數間距(Q3與Q1的差值),計算離群值上極限和下極限邊界(大于或者小于剩下觀測值的1.5倍的四分位數間距),篩選超過上極限和下極限的數值,判斷該數值為離群值。

圖4 視覺分神次級任務Fig.4 Visual distraction secondary tasks
圖5 視覺分神次級任務擺放位置Fig.5 Location of visual distraction secondary task
四分位數間距:
IQR=Q3-Q1。
(1)
離群值上極限:
upper=O3+1.5IQR。
(2)
離群值下極限:
lower=O1-1.5IQR。
(3)
采用方差分析(Analysis of Variance, ANOVA) 的方法研究視覺分神對駕駛員車輛橫向控制行為的影響。對于不滿足方差齊性的樣本,將進行Welch修正后檢驗;采用LSD及Tamhane’s T2多重比較的方法對不同水平下的樣本進行方差分析,探究兩兩水平間差異的顯著性。
2 結果
2.1 駕駛員視線離開路面的時間
本次試驗,在不同難度等級的次級任務中,駕駛員單次視線離開路面的時間統計分析結果見表1。

表1 不同視覺分神等級下單次視線離開路面的時間
駕駛員在駕駛過程中執行表1中的3種不同等級的視覺分神次級任務時,其單次視線離開路面的時間有顯著性差異 (F(2,760)=82.180,P<0.001)。隨著次級任務難度增大,駕駛員單次視線離開路面的時間延長(P0_1<0.001,P0_2<0.001,P0_3<0.001),因此驗證了次級任務設計的合理性。
2.2 車輛橫向控制
2.2.1車輛橫向運動
車道偏離離量標準差可反映車輛的橫向位置波動。視覺分神對車輛的車道偏離量標準差有顯著性影響,該影響均體現在高速公路 (F(3,196)=5.941,P=0.006) 和城市道路 (F(3,108.1)=2.823,P=0.040) 中。且無論駕駛員處于何種等級的視覺分神狀態,車道偏離量標準差 (F(1,398)=81.419,P<0.001) 的值在高速行駛環境下均高于低速行駛環境(如圖6所示),說明車輛的橫向位置波動與車輛行駛速度相關,車速越高,車輛的橫向位置波動越大,車輛的橫向運動越不穩定。根據車輛的車道偏離量標準差在高速公路 (P0_1=0.197,P0_2=0.133,P0_3<0.001) 和城市道路 (P0_1=0.662,P0_2=0.104,P0_3=0.050) 中各自的多重比較結果分析可得,當駕駛員的視覺分神程度達到高等級(3級視覺分神狀態)時,車輛的車道偏離量標準差開始出現顯著的增加(如圖6所示),說明駕駛員單次視線離開路面的時間達到2.814 s(表1)后,車輛的橫向位置開始出現明顯的波動。
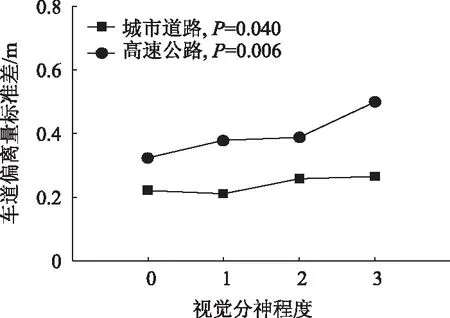
圖6 視覺分神對車道偏離量標準差的影響Fig.6 Influence of visual distraction on standard deviation of lane deviation
車道偏離量最大值反映了車輛的車道偏離程度。在城市道路中,視覺分神對車輛的車道偏離量最大值 (F(3,196)=1.405,P=0.245) 未觀測到有顯著性影響,說明低速行駛時,視覺分神對車輛的車道偏離程度并無顯著影響。但在高速公路中,觀測到視覺分神對車道偏離量最大值(F(3,196)=10.759,P<0.001) 即車道偏離程度產生了顯著性影響。數據表明,在高速公路場景,當駕駛員視覺分神狀態達到2級或其以上時,車輛的車道偏離量最大值 (P0_1=0.408,P0_2=0.001,P0_3<0.001) 隨著其視覺分神程度的提高而顯著提高(如圖7所示),說明在高速行駛的環境下,駕駛員單次視線離開路面的平均時間達到1.947 s后(見表1),車輛的車道偏離量最大值即其車道偏離程度會顯著增大,車輛橫向安全開始受到威脅。高速行駛環境下,當駕駛員視覺分神狀態達到2級時,車輛的車道偏離量最大值超過1.50 m;而當駕駛員視覺分神狀態達到3級時,車道偏離量的最大值可達2.181 m,偏離程度超過半個車道的距離。高速公路和城市道路的對比分析顯示,無論駕駛員處于何種等級的視覺分神狀態,車道偏離量最大值 (F(1,398)=600.624,P<0.001) 在高速行駛環境下均高于低速行駛環境(如圖7所示),且高速行駛環境下的車道偏離量最大值約為低速行駛環境下的2倍,表明車速越高,車輛的車道偏離程度越大。
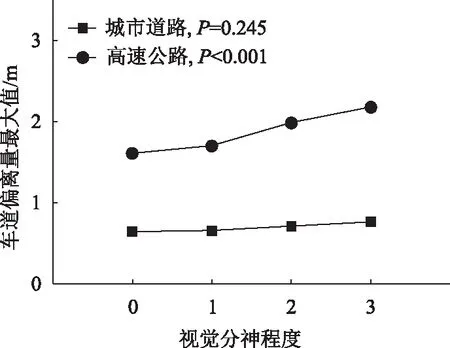
圖7 視覺分神對車道偏離量最大值的影響Fig.7 Influence of visual distraction on maximum lane deviation
車輛的橫擺角標準差可作為駕駛員對車輛的操縱穩定性的觀測指標之一。視覺分神對車輛的橫擺角標準差的顯著性影響均體現在高速公路 (F(3,196)=9.766,P<0.001)和城市道路(F(3,196)=3.749,P<0.001)中。如圖8所示,無論在高速公路(P0_1=0.009,P0_2=0.001,P0_3<0.001),還是在城市道路(P0_1=0.029,P0_2=0.065,P0_3=0.001),車輛的橫擺角標準差均隨著駕駛員視覺分神等級的增大而顯著增大,說明視覺分神導致了駕駛員對車輛的操縱穩定性下降,且視覺分神等級越高,駕駛員對車輛的操縱穩定性把握越弱。對比分析高速公路和城市道路在各等級的視覺分神程度下的車輛橫擺角標準差均值(F(1,398)=10.088,P<0.001),表明車輛行駛速度越高,駕駛對車輛的操縱穩定性下降得越多。
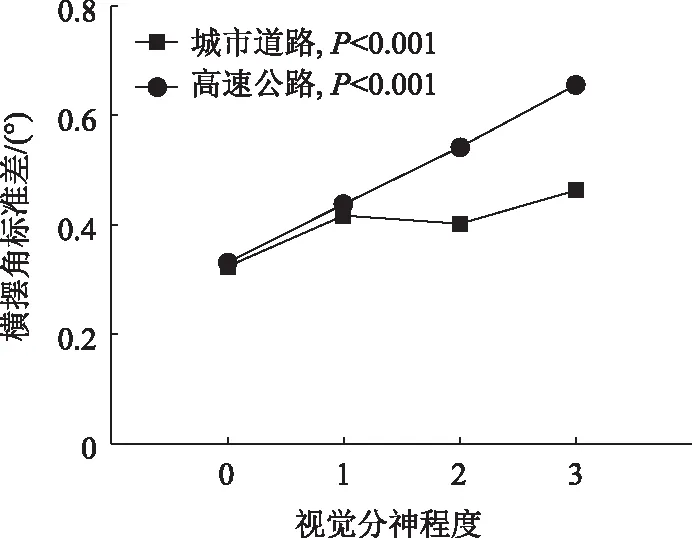
圖8 視覺分神對橫擺角標準差的影響Fig.8 Influence of visual distraction on standard deviation of yaw angle
2.2.2駕駛員轉向盤操控
轉向盤的轉角熵[10]表征駕駛員的心理負荷,轉角熵的值越大,駕駛員的心理負荷越大。數據表明,轉角熵在高速公路 (F(3,196)=9.992,P<0.001) 和 城市道路 (F(3,196)=14.770,P<0.001) 中均受到視覺分神的顯著影響,表明無論在高低速行駛環境,視覺分神均會影響到駕駛員的心理負擔。但轉角熵 (F(1,398)=0.239,P=0.625) 在高速與低速行駛環境的對比中沒有呈現顯著性差異,表明當駕駛員處于相同等級的視覺分神狀態時,車速并不會額外增加駕駛員的心理負荷。但無論在高速行駛環境 (P0_1<0.001,P0_2<0.001,P0_3=0.001),還是低速行駛環境 (P0_1<0.001,P0_2<0.001,P0_3<0.001) 下,轉角熵均分別隨著視覺分神程度的提高而出現不同程度的增大(如圖9所示),表明駕駛員視覺分神程度越厲害,駕駛員的心理負荷會越大。
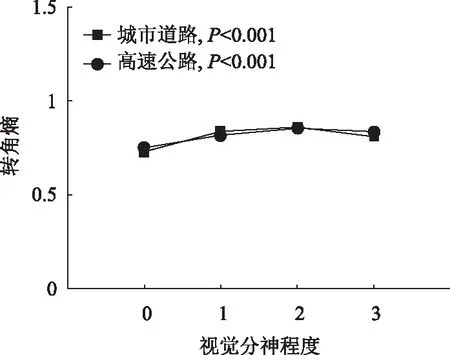
圖9 視覺分神對轉角熵的影響Fig.9 Influence of visual distraction on steering entropy
轉向盤轉角標準差是轉向盤波動程度的表征參數,也是車輛橫向運動穩定性的表征指標之一。無論在高速公路 (F(3,196)=11.521,P<0.001) 還是在城市道路 (F(3,196)=7.999,P<0.001) 中,視覺分神對轉向盤轉角標準差均產生顯著性的影響。對比分析高速公路和城市道路的轉向盤標準差均值,在相同等級的視覺分神程度下,高速行駛環境下的轉向盤轉角標準差 (F(1,398)=7.485,P=0.007) 均比低速行駛環境下的值高(如圖10所示),表明車輛行駛速度越高,轉向盤的轉角波動程度越大。進一步分析可知,無論在高速公路 (P0_1=0.023,P0_2<0.001,P0_3<0.001) 還是在城市道路 (P0_1=0.001,P0_2=0.004,P0_3<0.001) 中,轉向盤轉角標準差均隨著駕駛員視覺分神的嚴重等級程度增大而顯著增大,表明駕駛員視覺分神程度顯著影響轉向盤波動程度。
轉向盤逆轉頻率表征了駕駛員對轉向盤調整的頻率,轉向盤調整頻率越高,車輛橫向運動越不穩定。經分析得,轉向盤逆轉頻率受到駕駛員視覺分神的顯著影響,該影響均表現在高速公路 (F(3,196)=4.524,P=0.004) 和城市道路 (F(3,196)=6.553,P<0.001) 中。且在相同等級的視覺分神程度下,轉向盤逆轉頻率 (F(1,398)=52.136,P<0.001) 在高速公路下均高于城市道路下(如圖11所示),表明了車輛行駛速度越高,駕駛員對轉向盤的調整越頻繁。在城市道路 (P0_1=0.001,P0_2=0.004,P0_3<0.001) 和高速公路 (P0_1=0.023,P0_2<0.001,P0_3<0.001) 中,轉向盤逆轉頻率均因駕駛員處于視覺分神狀態而顯著增大,說明處于視覺分神狀態的駕駛員對轉向盤的調整次數會顯著增加,車輛趨于不穩定狀態。
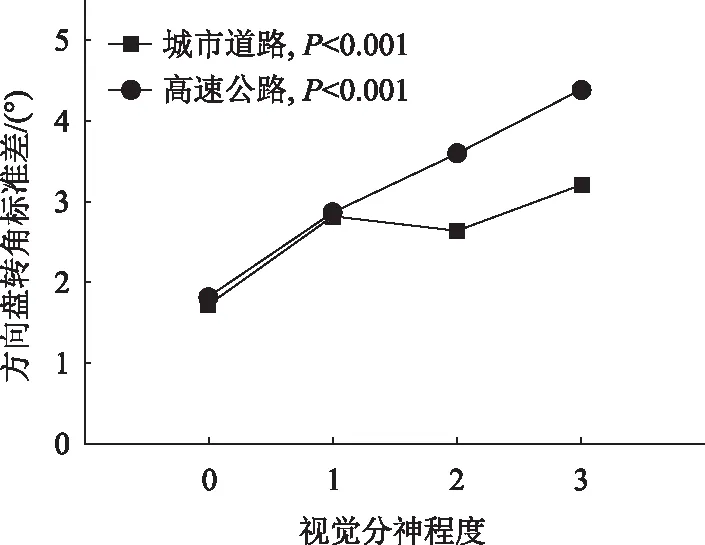
圖10 視覺分神對轉向盤轉角標準差的影響Fig.10 Influence of visual distraction on standard deviation of steering wheel angle
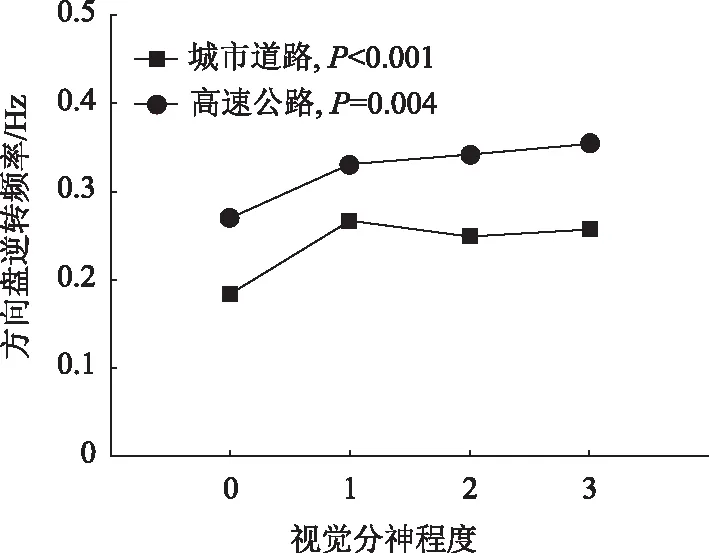
圖11 視覺分神程度對轉向盤逆轉頻率的影響Fig.11 Influence of visual distraction on steering reversal rate
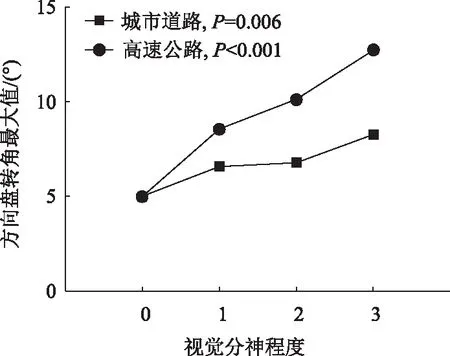
圖12 視覺分神對轉向盤轉角最大值的影響Fig.12 Influence of visual distraction on maximum steering angle
轉向盤轉角最大值反映了駕駛員對轉向盤的調整幅值,調整幅值越大,車輛橫向失穩的可能性會越高。對高速公路 (F(3,196)=0.000,P<0.001) 和城市道路 (F(3,196)=4.295,P=0.006) 下的轉向盤轉角最大值分析顯示,視覺分神對轉向盤轉角最大值均產生了顯著性影響。且在相同等級的視覺分神程度下,轉向盤轉角最大值 (F(1,398)=13.547,P<0.001) 在高速公路下均高于低速公路下(如圖12所示),表明駕駛員視覺分神會影響駕駛員橫向調整車輛的幅值,且調整幅值會隨著車速提高而增加。進一步分析表明,城市道路中,轉向盤轉角最大值 (P0_1=0.087,P0_2=0.053,P0_3<0.001) 只在駕駛員視覺分神達到一定程度(3級視覺分神狀態)時,才顯著增加(見圖12);而在高速公路中, 在駕駛員處于1級視覺分神狀態時,轉向盤轉角最大值 (P0_1=0.022,P1_2=0.311,P1_3=0.095) 已開始顯著增加(見圖12),表明視覺分神程度在高速行駛環境下對駕駛員轉向盤調整的幅值的影響更為顯著。
2.3 車輛縱向控制
車輛的車速標準差反映了車速的波動程度。車速標準差的數據分析表明,無論在高速公路(F(3,196)=0.004,P=0.004) 還是在城市道路 (F(3,196)=4.563,P=0.004) 中,車速標準差均受到駕駛員視覺分神的顯著性影響。且在相同視覺分神等級狀態時,高速行駛環境下的車輛車速標準差 (F(1,398)=26.636,P<0.001) 均高于低速行駛環境下的值(如圖13所示),說明車速會影響車輛的車速波動程度。進一步分析表明,在城市道路中,駕駛員處于1級視覺分神狀態時,車速標準差 (P0_1=0.018,P0_2<0.001,P0_3<0.001) 已開始顯著增加;而在高速公路中,車速標準差 (P0_1=0.354,P0_2=0.523,P0_3=0.008) 在駕駛員處于一定等級的視覺分神狀態時(3級視覺分神狀態)才顯著增加, 表明在低速行駛環境,車速極易受到駕駛員視覺分神的影響,而在高速行駛的環境下,當駕駛員單次視線離開路面的時間達到2.814 s后(3級視覺分神狀態),車速才會呈現顯著的波動。
車輛的加速度標準差是駕駛員加減速操作頻率的反映。加速度標準差的數據分析表明,無論在高速公路 (F(3,196)=101.420,P<0.001) 還是在城市道路 (F(3,196)=125.734,P<0.001) 中,車輛的加速度標準差均受到駕駛員視覺分神的顯著影響。且無論在高速公路 (P0_1=0.321,P0_2<0.001,P1_2<0.001) 還是在城市道路 (P0_1=0.528,P0_2<0.001,P0_3=0.793),車輛的加速度標準差均只在駕駛員單次視線離開路面的時間達到1.947 s后(2級視覺分神狀態),駕駛員對加減速的控制開始變得紊亂;當駕駛員單次視線離開路面的時間達到2.814 s后(3級視覺分神狀態),車輛的加速度標準差下降到與駕駛員在零或1級視覺分神狀態時的值無異(如圖14所示),表明當駕駛員單次視覺分神過于嚴重,即駕駛員單次視線離開路面的時間達到2.814 s(3級視覺分神狀態)后,駕駛員可能會在意識到視線離開路面的時間過長后,采取一些類似降低加減速頻率和幅值的補償措施,以彌補因視覺分神帶來的行車安全威脅。
跟車距離是駕駛員縱向控制能力最直觀的反映。數據分析表明,僅在城市道路中,跟車距離均值 (F(3,196)=8.007,P<0.001) 受到駕駛員視覺分神的顯著性影響;在高速公路中,跟車距離均值 (F(3,196)=0.844,P=0.471) 未觀測到受視覺分神的顯著性影響。在城市道路中,駕駛員的跟車距離均值 (P0_1=0.002,P0_2<0.001,P0_3<0.001) 會隨著駕駛員視覺分神等級的升高而顯著升高,表明低速行駛環境下,駕駛員處于視覺分神時,會增大跟車距離,以彌補視覺分神帶來的事故風險;而在高速公路中,即使當駕駛員意識到自身存在視覺分神情況,駕駛員亦無法準確評估安全的跟車距離而對跟車距離進行調整。進一步分析表明,跟車距離均值 (F(1,398)=107.903,P<0.001) 在高速行駛環境下均高于低速行駛環境下(如圖15所示),且約為低速行駛環境下的2倍。
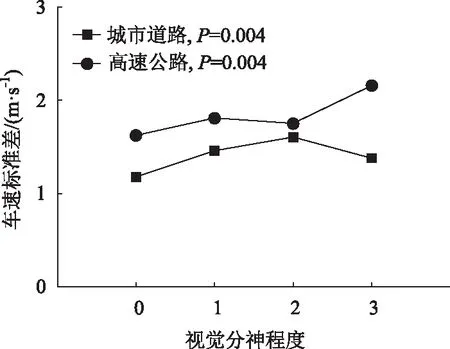
圖13 視覺分神對車速標準差的影響Fig.13 Influence of visual distraction on standard deviation of vehicle speed
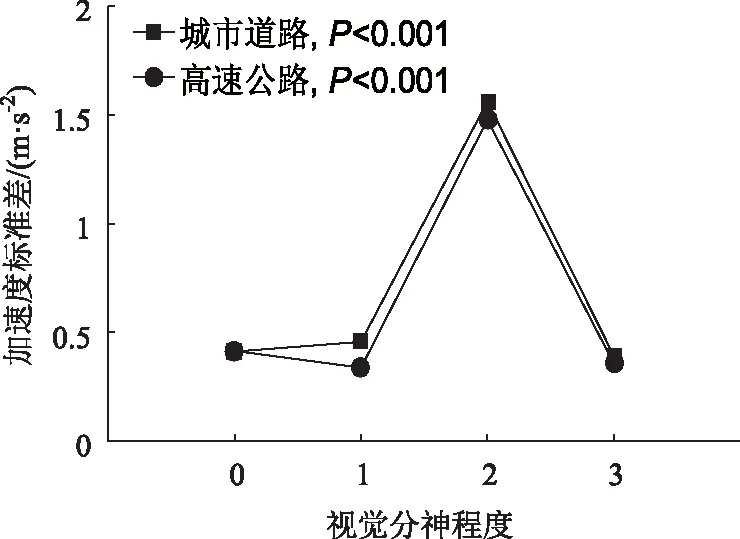
圖14 視覺分神對加速度標準差的影響Fig.14 Influence of visual distraction on standard deviation of acceleration
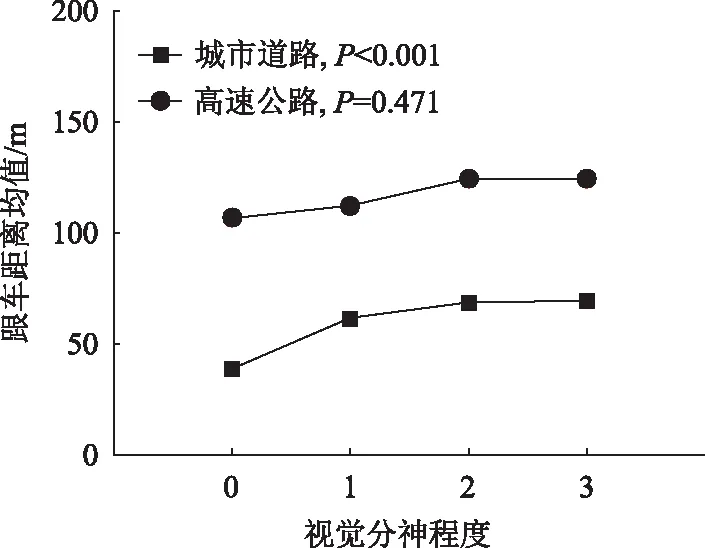
圖15 視覺分神對跟車距離的影響Fig.15 Influence of visual distraction on car-following distance
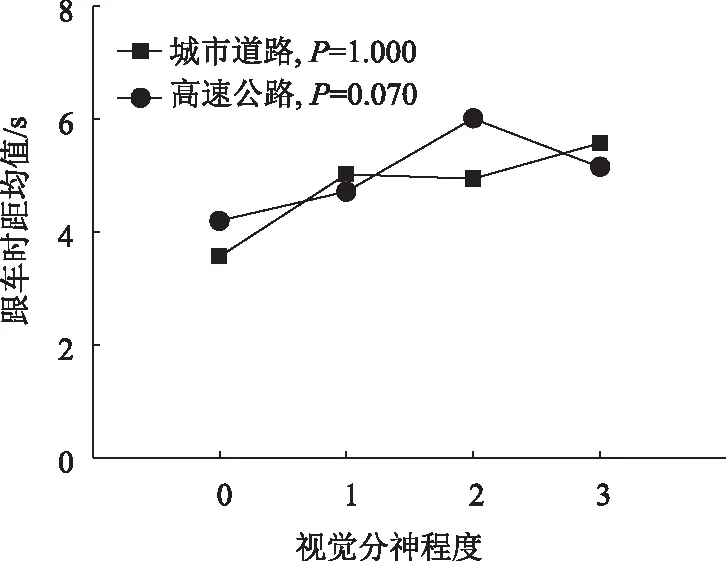
圖16 視覺分神程度對跟車時距均值的影響Fig.16 Influence of visual distraction on car-following time headway
跟車時距是常用的表征駕駛員對車輛縱向控制習慣的指標。駕駛員跟車時距均值在高速公路 (F(3,196)=3.045,P=0.070) 和城市道路 (F(3,109)=0.000,P=1.000) 均未檢測出顯著性影響 (如圖16所示)。 綜合文中對車速標準差和跟車距離的分析,當駕駛員意識到自身處于視覺分神狀態時,會頻繁改變車速、增大跟車距離的策略,以達到保持相對恒定跟車時距的目的,保持駕駛員對車輛縱向控制的習慣。
3 結論
通過設計誘導駕駛員視覺分神的次級任務(包含3個等級),討論了視覺分神程度(駕駛員單次視線離開路面的時間)對其車輛橫向控制和縱向控制行為的影響以及駕駛員為平衡事故風險可能采取的補償措施,得到以下結論:
(1) 視覺分神會導致駕駛員對車輛的橫向控制能力變差,使得車輛的車道偏離量標準差、轉向盤轉角標準差等反應車輛橫向位置和轉向盤轉角變化的參數均增大;視覺分神對車輛橫向操控的不利影響會隨著駕駛員視線離開路面的時間和車速的增加而加劇。
(2) 視覺分神會使車速波動增大,但不直接影響駕駛員的跟車時距;處于視覺分神狀態的駕駛員會通過增大跟車距離和降低加速度頻率的方式來平衡事故風險。
缺少可以量化駕駛員對車輛橫向控制能力和縱向控制能力的數學模型。在進一步的研究中,將尋找可有效評估駕駛員的橫向控制能力和縱向控制能力的方法,基于文中的指標參數以及考慮到駕駛員可能采取的補償行為,建立可評價駕駛員駕駛表現的數學模型。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
建材發展導向(2021年20期)2021-11-20 05:43:18
汽車電器(2018年1期)2018-06-05 01:22:54
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2016年9期)2016-06-06 07:42:10
公民與法治(2016年4期)2016-05-17 04:09:26
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06