基于Vi Be的車流量統(tǒng)計算法
2020-02-04 16:05:57費維倩程苗
中國集體經濟 2020年2期
費維倩 程苗
摘要:交通統(tǒng)計作為智能交通系統(tǒng)的關鍵技術之一,已逐漸成為研究的熱點。本課題提出了一種車流量統(tǒng)計算法來確定車輛是否進入觀察區(qū)域,從而實現(xiàn)交通流量統(tǒng)計。該研究的結果基于視頻的快速視頻流量統(tǒng)計算法。YUV色彩空間符合人類視覺習慣,用于消除陰影對交通統(tǒng)計的干擾。以解決光照變化對系統(tǒng)的影響。在道路上打開虛擬檢測區(qū)域,并且使用Vi Be表明,上述算法可以有效地計算交通量,可以用于交通引導,管理提供有效分析處理數(shù)據(jù)。
關鍵詞:車流量統(tǒng)計;Vi Be 算法
隨著中國社會經濟的迅猛發(fā)展,中國城市的交通量突然增加,智能交通系統(tǒng)的重要性也日益凸顯。交通監(jiān)控包括車速監(jiān)控,交通量和路況監(jiān)控,車輛異常行駛報警,車型判斷,車牌識別等。其中,流量統(tǒng)計可以對多個車道進行車輛計數(shù)和擁堵分析,為交通管理員提供大量有效信息。實現(xiàn)智能道路調度,減少擁堵,提高道路資源利用率。
目前用于目標檢測的學術方法主要分為以下三類:幀間差分法,背景減法,光流法。
Vi Be(視覺背景提取器)算法,視覺背景提取算法。具有其高實時性和穩(wěn)健性,因此,本文將其引入基于車輛流量統(tǒng)計技術視頻分析的交通流量檢測和統(tǒng)計研究。
Vibe算法首先將隨機選擇機制和鄰域傳播機制應用于背景模型的建立和更新。此樣本集由過去位置及其鄰居位置像素值組成,然后將此處的像素值與此樣本集中的像素進行比較,從而來判斷像素是否屬于背景。背景模型隨機再次更新。
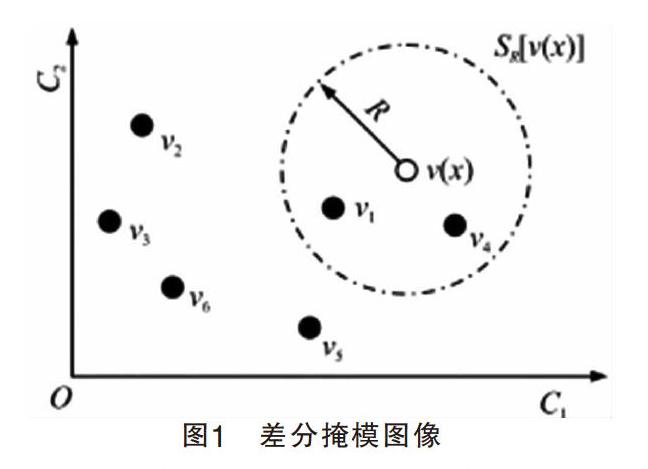
Vibe算法于2011年提出。本文選擇基于Vibe模型的目標提取方法。Vibe 模型步驟如下:1.首先根據(jù)像素鄰域的像素值,即當前像素,定義背景模板8 鄰域模型中,隨機抽取 1 個值作為背景模板元素,并重復 N 次。在當前像素點xV(V)處設置顏色空間值,像素背景模板值為: M(x)={ V}1 V V3 V4 VN1. 2.分析比較當前像素與背景模板中每個元素之間的距離,如圖1所示。用像素點 V(x)中心和 R作為半徑計數(shù)圓包含背景模板 M(x)的數(shù)量,當該值小于設定閾值時,將其確定為前景,并且當其大于閾值時,將其確定為背景。圖 1 Vibe 分類模型。3.背景模型更新。對于被分類為背景的像素 V(x),像素 V(x)以概率 P(t)隨機地替換背景模板 M(x)中的像素值,樣本更新公式如下:P(t)=1N
雖然傳統(tǒng)的Vibe算法運行良好,但它會為圖像中快速移動的目標產生重影,這可能導致目標的誤提取。本文結合幀差法改進問題,提高檢測精度。1.首先初始化并建立背景模板以及前景維持矩陣F (x y);2.對視頻序列進行差分建模并進行二值化處理;3.運用前文方法,根據(jù)當前像素點 R 包含背景樣本的個數(shù)是否在閾值范圍內,判斷該點屬于背景還是前景。若判斷為背景則執(zhí)行步驟5.,若判斷為前景,則根據(jù)幀差法模型進一步判斷當前模型是鬼影還是真實前景,跳轉到步驟4.;4.根據(jù)差分掩模圖像繼續(xù)判斷當前點是重影還是前景,即將幀差法獲得的背景圖像與Vibe背景圖像進行比較,獲取新的背景圖像。若超過則認為是鬼影點;5.根據(jù)傳統(tǒng) Vibe 算法的更新步驟更新背景模板。
由于在RGB空間中處理原始Vi Be算法,雖然可以生成陰影,但是陰影不能被消除,從而影響流量統(tǒng)計的準確性。這里的車輛檢測算法需要檢測和抑制由YUV空間中的車輛移動產生的陰影。另外,陰影區(qū)域中的像素的色度幾乎等于背景像素的色度。由于移動物體和陰影的色度相似,但亮度值的差異較大,請使用此屬性來檢測和移除陰影像素。
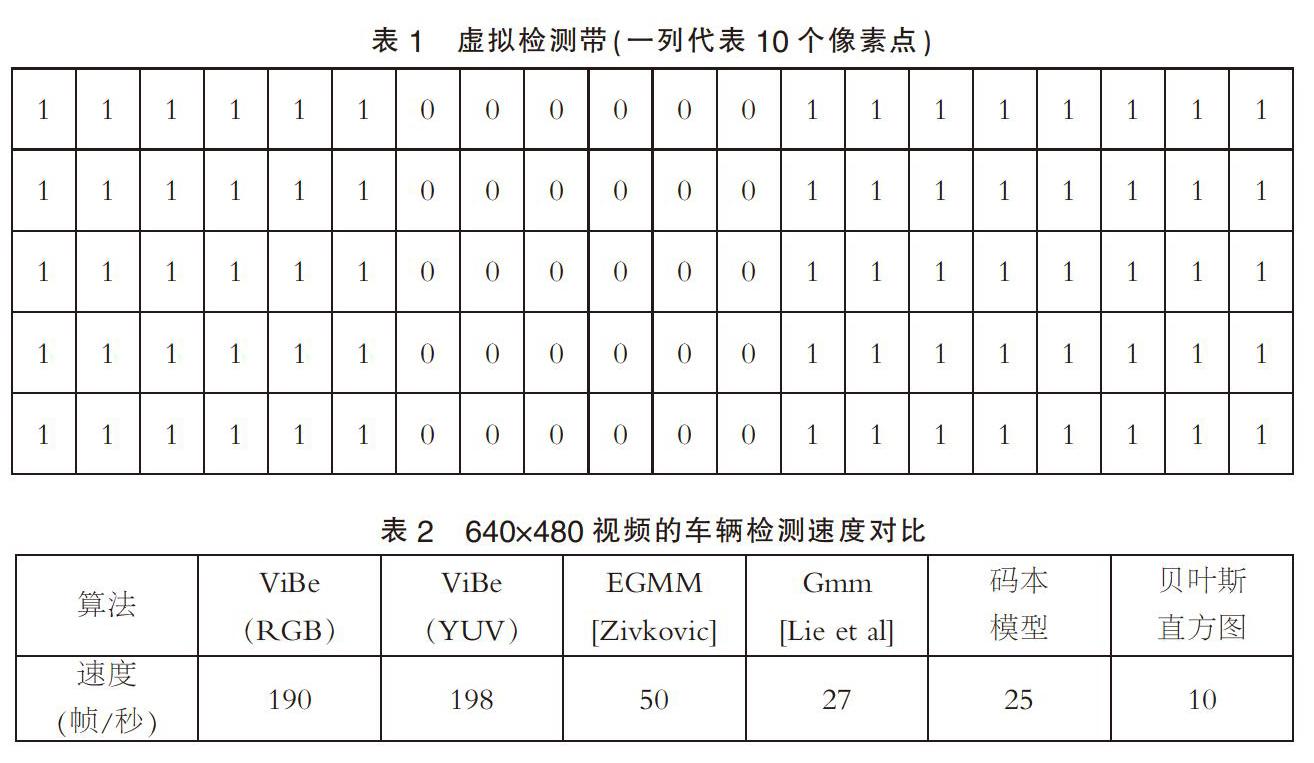
本課題中的流量統(tǒng)計算法中通過更新時間和虛擬檢測帶組相結合的方式。使用虛擬檢測區(qū)域的檢測方法是在每個信道上手動設置虛擬頻帶。如果設置多個虛擬檢測波段那么就需要多個通道,因為當汽車通過該虛擬波段時,虛擬線路上的像素更新次數(shù)將發(fā)生明顯變化,因此流量統(tǒng)計信息基于此更改。同時,是否存在車輛訪問檢測區(qū)域是由更新次數(shù)的改變來進行指示的。更新的數(shù)量將基本保持不變是由于在正常情況下,沒有車輛進入。以此來作為虛擬檢測帶的補充。本文使用5行像素的虛擬磁帶,如表1所示,假設車輛寬度為60像素。在表中,1表示需要更新作為背景,0表示更新是前景目標,即車輛。如果在由5行像素組成的虛擬帶中存在前景像素,不需要更新的像素和連接的像素滿足一定數(shù)量,也就是說,如果車輛進入,則車輛統(tǒng)計數(shù)據(jù)可以增加一個。直至虛擬檢測帶上不再有 0 為止。如果虛擬波段全部為1則沒有車輛通過。實驗結果如表2所示。
如圖1所示,速度和準確度更好地結合在一起。本方法簡單有效, 誤差較小。
算法整流程:1.在各個車道上設置虛擬檢測帶。2.取視頻序列的第一幀以初始化樣本模型,并取相應位置的八個鄰域來初始化模型,取N次。3.對于新的幀圖像,將 X位置的像素與樣本模型中的對應位置進行比較,差值小于某個范圍 R,并且滿足 N個樣本中的 W,即,將新的 X幀視為背景并且需要更新。否則為前景。4.背景更新,包括像素和幀級更新。5.陰影去除與后處理。
現(xiàn)在常用的流量統(tǒng)計算法具有基于區(qū)域標記和虛擬檢測線的統(tǒng)計方法。后者在道路上設置虛擬檢測線,然后確定是否存在通過檢測線的前景目標。本文提出使用多個虛擬檢測帶和連接域來組合流量統(tǒng)計。
本課題提出了一種基于Vi Be的快速流量檢測算法。在使用 YUV空間進行處理和消除陰影效果時,還可以消除光照變化帶來的不利影響,此外,此算法還取決于更新的數(shù)量,以及確定車輛訪問觀察窗口,并進行實時交通流量統(tǒng)計通過更新次數(shù)和虛擬檢測區(qū)域的方法。通過實驗結果表明此方法簡單而且有效果,同時又具有實時性。因此,本文提出的Vi Be具有一定的車輛交通統(tǒng)計實用性。
參考文獻:
[1]李香平,楊兆選.基于虛擬線的視頻交通檢測新算法[J].電子測量與儀器學報,2005(04).
[2]齊美彬,楊愛麗,蔣建國,等.一種基于改進碼本的車輛檢測與跟蹤方法[J].中國圖象圖形學報,2011(03).
[3]杜宇人,周愛軍.一種基于視頻圖像的運動車輛跟蹤方法[J].電子測量與儀器學報,2009(03).
[4]檀甲甲,張建秋.實時采集道路車流量信息的視頻新方法[J].儀器儀表學報,2007(01).
[5]唐佳林,李熙瑩,羅東華,等.一種基于幀差法的夜間車輛檢測方法[J].計算機測量與控制,2008(12).
[6]於正強,潘赟,宦若虹.一種結合幀差法和混合高斯的運動檢測算法[J].計算機應用與軟件,2015(04).
[7]胡宏宇.混合交通中運動目標特征表達與分類算法的研究[D].吉林大學,2007.
*基金項目:基于無人機vibe圖像處理車流量統(tǒng)計算法(編號,201810959038)。
(作者單位:安徽三聯(lián)學院)