基于無人機航拍影像處理的車速檢測研究
2020-02-07 13:03:52趙晉龍浩張雅婷
物聯網技術 2020年1期
關鍵詞:計算機技術
趙晉 龍浩 張雅婷

摘 要:車速檢測作為交通系統中的重要一環,其效果與交通數據的采集方式緊密相關。當前車速檢測大多依托增加道路基本設施等方式來實現,所需成本較高且容易受外界因素影響。文中引入機動性強且節能環保的無人機作為提取交通信息的媒介,對航拍所得視頻中的影像做移動物體提取并進行車輛分類,隨后提取車道范圍及車道線寬度,以車道寬度為比例尺,利用前后影像相減法計算車輛移動像素距離,估算車輛速度。在不同飛行高度下對該方法的有效性進行驗證,所得車速平均誤差為3.22%,可有效解決智能交通系統中廣域信息的獲取問題。該方法可廣泛應用于智能交通管理、災害預測、地形地貌觀測、農林防災、應急救援等領域。
關鍵詞:車速檢測;無人機遙感;智能交通系統;影像處理;計算機技術;SIFT
中圖分類號:TP39文獻標識碼:A文章編號:2095-1302(2020)01-00-03
0 引 言
車速檢測是交通管理系統中至關重要的一項任務,常見的車速檢測方法主要包括超音波檢測、紅外線檢測、環路線圈式檢測以及基于影像檢測等[1-2]。然而,超音波檢測方法的準確度并不高,容易受到車輛遮蔽和行人的影響,且檢測距離短。紅外線檢測方法則易受車輛本身熱源的影響,抗干擾能力較差,因而準確度不高。環路線圈式檢測方法準確度相對較高,但需要在車輛通過的路面填埋感應線圈,工程量巨大,不僅會對路面造成嚴重損壞,而且施工和維修需要封閉道路,易造成交通擁堵[3-4]。基于對上述方法及城市建設和交通管理部門長期實踐結果的分析:現有車速檢測方法存在明顯弊端,容易受到各種因素的影響,無法從根本上解決目前交通系統存在的問題。
隨著計算機技術、圖像處理等技術的發展,基于影像檢測的方法在交通檢測中得到了越來越廣泛的應用。傳統的使用固定式攝像機拍攝交通影像的方法不僅拍攝距離和范圍極其有限,同時還容易因拍攝角度固定而造成大車遮擋小車導致車輛辨識困難等問題,存在較大的能源與資源浪費。相對于傳統的影像交通檢測方法,利用無人機檢測交通具有偵測范圍廣、廉價便利、獲取信息豐富等優點。
雖然無人機已經被廣泛用于生活中的諸多方面,但是借助無人機航拍所得圖像來進行車速估測的文獻相對較少。Yamazaki[5]等人利用車輛陰影來估測車速;Moranduzzo[6]等人嘗試使用一組不變特征(即SIFT特征)來定位車輛并借助兩幅連續的無人機航拍影像來實現對車速的估測。分析相關研究文獻可得,以往通過遙感圖像處理來實現車速估測的方式很少受到關注,主要有以下兩方面原因:
(1)可實現相同區域圖像序列信息獲取的設備太少;
(2)所得圖像的分辨率較低,導致無法有效識別車輛的空間位置,故車速估測不準確。
隨著高分辨率圖像的出現,在兩個不同時間確定車輛精確的空間位置變得可行,研究人員也逐漸開始通過航拍影像來估測車速。
基于前述分析,本文借助機動性靈活且節能環保的無人機作為交通信息提取的媒介,采用基于影像檢測的方法來空拍偵測車輛速度,獲得交通資訊并應用于ITS,以期提供政府或駕駛人交通信息,幫助改善城市交通狀況、減少疲勞駕駛,進而減少交通事故的發生。經不同飛行高度驗證,該方法平均誤差為3.22%,可有效解決智能交通大范圍信息的獲取問題。
考慮到傳統車輛速度檢測存在建設成本較高,視頻采集容易發生車輛重疊、航天遙感探測更新頻率低,難以實現連續觀測等問題,設計的無人機航拍影像處理的車速檢測系統的創新點如下:
(1)引進了無人機航拍作為交通影像獲取媒介,由于無人機的拍攝角度是從車道的正上方向下拍攝,不會出現大型車擋住小型車的情形,可以有效避免傳統固定架設攝影機的車輛間互相遮蔽問題;
(2)本系統采用無人機航拍方式,其高機動性非常適合做短期活動的周邊車流分析,可用于改善大型活動周邊車流堵塞等問題;
(3)本系統利用車道寬度作為比例尺計算車速,避免了以往無人機航拍影像分析過程中出現的無人機懸停不穩、懸停高度(采用氣壓及GPS數據估算)測量誤差過大造成的計算錯誤;
(4)本系統使用連續影像相減法找出移動物和背景,辨識車輛后,計算車輛質心移動的像素距離,解決了以往采用前后景相減算法對車輛辨識較困難等問題;
(5)在背景處理部分,本系統使用二值化方法凸顯道路標線,分析車道位置及標線寬度;
(6)在不同飛行高度下進行車速計算實驗驗證,并計算出了不同高度下的車速測量誤差率,拓展了本系統的空間應用范圍。
1 無人機航拍影像車速估算
本文通過引入機動性強,靈活且節能環保的無人機作為提取交通信息的媒介,對航拍所得視頻中的影像做移動物體提取并進行車輛分類,隨后提取車道范圍及車道線寬度,以車道寬度為比例尺,利用前后影像相減法計算車輛移動像素距離,估算車輛速度。影像處理流程如圖1所示。
1.1 影像前處理
影像前處理主要包含前景提取、色彩空間轉換、影像二值化、邊緣檢測、形態學、水平投影設定感興趣區域[7-8]等過程。
對于前景提取,本系統選用連續影像相減法(Temporal Differencing)[9]。考慮到連續影像相減法基本不會受無人機晃動的影響,不會因此造成無法有效判斷移動的物體,因此可以更完整地獲取移動物體的相關信息。
為減少光線變化造成的影響,本系統使用HSV色彩空間,透過轉換方程式將RGB色彩空間轉換至HSV色彩空間,并利用其飽和度的特性去除影像的陰影,以進行后續影像處理。
形態學處理(Morphology Operation)[10]是針對二值影像強化的應用。其功能主要在于減少影像中零散的物件個數,依照使用者需求設定結構作修補或刪減,可以使二值化后的小區塊融合或消失。形態學的第一步通常是設定一個結構元素(Structuring Element,SE),其大小和形狀皆可自由設定;第二步以預先設定的結構元素作基礎,依照形態學的演算法對二值化的影像作填補或挖空。基礎的形態學演算法有膨脹(Dilation)和侵蝕(Erosion)兩種,由上述兩種方式相互組合衍生出斷開(Opening)和閉合(Closing)。
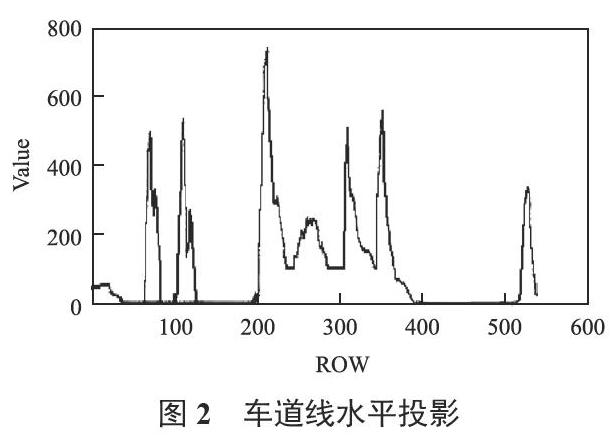
水平投影方法主要是將影像中的物體投影至垂直軸上,沿著行(Column)的方向作像素的加總。水平投影在本系統中用來判斷車道占整張圖片垂直軸的比例,以此判斷各車道的范圍及設定感興趣的區域(Reign of Interest,ROI)。如圖2所示,可根據車道線所在位置之間垂直距離的規律變化標出車道中線及車道范圍的大概位置以方便后續處理。
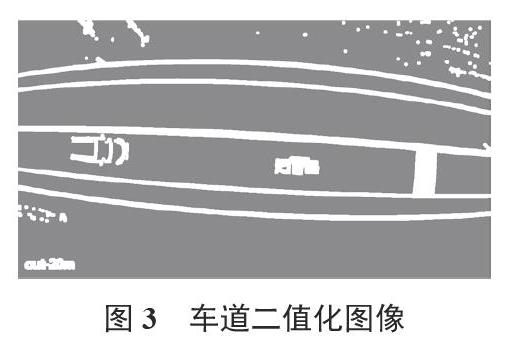
在整張影像中,含有有效信息的區域可能僅為一小部分,但系統卻需要處理整張影像,導致系統處理圖像數據的時間過長,不僅浪費計算機效能,甚至還有可能因為其他潛在干擾因素而造成整個系統的誤判。因此,本系統僅對影像中的特定區域進行提取,以此作為設定的ROI。設定感興趣的區域后,不僅可以極大地減少系統所需要處理的圖像量,而且可以將因攝影鏡頭造成的較嚴重變形的畫面邊緣移除,以達到較高的精準度。
車道二值化圖像如圖3所示。
1.2 車流分析
本系統采用Matlab設計影像處理程序,通過連續影像中車輛的比對,找出其在下一幅影像中的位置,并且利用其在影像上的特征追蹤、過濾目標,從而計算出車速,最后在畫面上顯示車速計算結果。
1.2.1 特征提取
特征提取是用來區分影像中各不同物體的方法,常見的特征包括色彩、大小及紋理等。本系統主要通過計算前景物體的大小及邊長來計算質心的位置,方法如下:
(1)將整張圖像用連續影像相減法提取前景影像,之后提取ROI區域內的影像并通過二值化將圖像簡化;
(2)利用形態學方法去除干擾、修補影像即可得到較完整的前景影像;
(3)通過連通區域標記法將前景影像中相互連通的區域標記成一個整體,計算出每個整體部分的長、寬以及質心的位置,供后續計算車速使用。
1.2.2 移動物體分類
經過特征提取后,依據獲取的圖像信息進行車流分析與移動物分類,將非車輛的移動物體排除。
本系統主要利用連通區域的邊長來判斷移動物體的大小,即利用連通區域的長度和寬度來判斷移動物體的類型。首先,判斷連通區域的寬度是否大于車道寬度的四分之一(車道寬度是依據水平投影所得到的平均車道寬度):如果連通區域寬度大于車道寬度的四分之一,則需要對長寬比進行判斷,反之則視為干擾,將其排除;若連通區域寬度大于車道寬度的四分之一,且長寬比介于1.5~3倍之間,則將其視為車輛,此區間包含小型車(機車、自行車等)以及中型車(汽車、商務車、小貨車等);車寬大于車道寬度一半且長度超過寬度3.5倍的車輛,我們將其劃分為大型車(包含卡車、公交車、旅游大巴、大貨車等),其他車寬則視為干擾排除。此方法可以將大部分因無人機檢測失當或路邊樹木枝葉晃動而產生的殘影以及其他非車輛的移動物體排除。
1.2.3 車速計算
目前大多通過坐標平面轉換的方式測量車輛速度,這就需要先在真實場景中設立參考點后進行測量,接著在影像中判斷參考點位置,并輸入其在真實場景中的相對位置信息,通過三維坐標換算出車輛在影像中的實際行駛距離,再根據速率公式計算出車輛速度。但由于相關參數獲取耗時太久,且此種方式無法與無人機所具備的機動性及方便性所比擬,因此本系統提出一種較方便、快速的測量方法。
本系統采用的方法以現有道路標線為參考,以此來計算汽車實際行駛距離,系統在判斷車型時,會依據車型的長寬比判斷移動物體是否為需要提取的目標,如果經判斷該移動物體不是目標物,則系統會將此連通區域視為干擾,不對其速度進行測量。而經判斷被視為目標物的連通區域,本系統會先計算連通區域的質心,將目標物位置有效定義,隨后比較前后兩張圖片的質心,再利用歐式距離公式即可計算出質心的移動距離。以水平投影估計出的車道寬度為比例尺,將每個像素所代表的實際距離與質心移動距離的像素相乘,即可得知車輛的實際移動距離,再將其除以兩張圖片間的時間差,便可求得車輛的移動速度。
1.3 系統有效性驗證
為驗證該基于無人機航拍影像處理的車速檢測系統的有效性,在將車輛實際行駛車速設定為恒定值45 km/h的基礎上,使用了具有GPS定位與手機操控功能的DJI PHANTON2 VISION+無人機進行了幾十次實際車輛行駛速度測量的對比實驗,飛行高度分別為20 m,30 m和40 m,對數據進行完整記錄,求解出不同高度下的平均值及平均誤差。DJI PHANTON2 VISION+無人機的GPS定位功能可以有效減少對于操控技術的要求,而專精在空拍畫面上。同時,通過手機APP的操作界面,可以實時獲取目前無人機的速度、高度以及攝影機與攝影畫面等信息。其攝影機錄影最高畫質為1 920×1 080 Pixels(30 FPS),但為了提升運算速度,將分辨率降低至960×540 Pixels。實驗開發平臺為Matlab 2016b,影像提取間隔為15 Frames,等同于1 s內提取2張影像進行處理。20 m,30 m,40 m高度下實驗估算車速結果示例如圖4所示。根據表1中不同高度下的速度估測值與平均誤差比率可得,本系統車速估測總平均誤差比率為3.22%,車速估測效果良好,故基于無人機航拍影像處理的車速檢測系統較為有效。
2 結 語
本文研究的是基于無人機航拍影像處理的車速檢測系統,引入機動性強、靈活且節能環保的無人機作為提取交通信息的媒介,通過對航拍所得視頻中的影像做移動物體提取并進行車輛分類,隨后提取車道范圍及車道線寬度,以車道寬度為比例尺,利用前后影像相減法計算車輛移動像素距離,從而估算出車輛速度,不同高度下的平均誤差率為3.22%,車速檢測效果良好。
與傳統的車速檢測系統相比,該系統成本低,靈活性、抗干擾性更強,亦可載入FPGA提升計算速度,進行實時分析決策,因此可被廣泛應用于智能交通系統中。
參 考 文 獻
[1] GONZALEZ C,PEREZ M E S-S. IRF World Road Statistics 2012:Data 2005-2012 [R]. World Road Statistics,2012.
[2]史文中,賀志勇,張肖寧.淺析3S技術集成與公路交通建設[J].測繪通報,2003,12(3):12-15.
[3]李德仁,李清泉,楊必勝,等.3S技術與智能交通[J].武漢大學學報(信息科學版),2008,33(4):331-336.
[4]彭春華,劉建業,劉岳峰,等.車輛檢測傳感器綜述[J].傳感器與微系統,2007,26(6):4-7.
[5] YAMAZAKI F,LIU W,VU T T. Vehicle extraction and speed detection from digital aerialImages [C]// IEEE International Geoscience & Remote Sensing Symposium,Boston,Massachusetts,U.S.A,2008.
[6] MORANDUZZO T,MELGANI F. Car Speed Estimation Method for UAV Images [C]// IEEE International Geoscience & Remote Sensing Symposium,Quebec,Canada,2014.
[7] WANG W,HE Y,LI Z,et al. A real-time target detection algorithm for infrared search and track system based on ROI extraction,in signal processing,communication and computing (ICSPCC)[C]// 2012 IEEE International Conference on,2012:774-778.
[8] BARBANCHO I,SEGURA C,TARDON L J,et al. Automatic selection of the region of interest in ancient scores [C]// in MELECON 2010-2010 15th IEEE Mediterranean Electrotechnical Conference,2010:326-331.
[9] MURALI S,GIRISHA R. Segmentation of Motion Objects from Surveillance Video Sequences Using Temporal Differencing Combined with Multiple Correlation,in Advanced Video and Signal Based Surveillance,2009 [C]// AVSS '09. Sixth IEEE International Conference on,2009:472-477.
[10]王亞洲.基于無人機航拍圖像的拼接算法研究[D].北京:北京工業大學,2018.
猜你喜歡
電子技術與軟件工程(2016年18期)2016-11-14 23:10:10
電腦知識與技術(2016年24期)2016-11-14 02:08:15
電子技術與軟件工程(2016年18期)2016-11-14 01:13:21
電子技術與軟件工程(2016年18期)2016-11-14 01:09:22
知音勵志·社科版(2016年9期)2016-11-09 06:59:38
數字技術與應用(2016年9期)2016-11-09 00:28:11
知音勵志·社科版(2016年8期)2016-11-05 04:27:21
科技視界(2016年18期)2016-11-03 23:29:16
中國科技博覽(2016年19期)2016-10-19 12:27:07
電腦知識與技術(2016年21期)2016-10-18 23:22:50