基于卷積神經(jīng)網(wǎng)絡(luò)的瀝青路面裂縫識別方法
2020-03-01 05:34:17李永緒謝政專唐文娟
西部交通科技 2020年6期
關(guān)鍵詞:瀝青路面
李永緒 謝政專 唐文娟

摘要:針對傳統(tǒng)裂縫識別方法準(zhǔn)確性低、環(huán)境適應(yīng)性差的問題,文章提出一種基于卷積神經(jīng)網(wǎng)絡(luò)的瀝青路面裂縫識別方法,融合了CLAHE與深度學(xué)習(xí)算法。試驗結(jié)果表明,該方法能夠更準(zhǔn)確地識別裂縫,識別精確率達到94.9%,且泛化能力良好。
關(guān)鍵詞:瀝青路面;CLAHE算法;卷積神經(jīng)網(wǎng)絡(luò);裂縫識別
0 引言
瀝青路面是現(xiàn)行鋪筑面積最多的一種高級路面,裂縫是其常見的路面病害之一。裂縫若不及時精準(zhǔn)識別并修復(fù),將會衍生出其他更為嚴(yán)重的次生病害,進而引發(fā)安全事故。如雨水滲入裂縫可能腐蝕路基,在車輛荷載的反復(fù)作用下,會導(dǎo)致裂縫加寬加深甚至路面塌陷,降低道路的使用壽命,危害行車安全。因此,研究如何進行快速、準(zhǔn)確地檢測裂縫是路面養(yǎng)護工作中最為重要的任務(wù)之一。
目前路面裂縫識別仍以人工巡查為主,效率低、存在安全隱患且結(jié)果易受主觀影響。現(xiàn)行主流的路面裂縫識別算法有閾值分割[1]和邊緣檢測方法[2],這兩類算法均基于圖像處理技術(shù),需要手工提取特征,同時對噪聲敏感,存在檢測速度慢、準(zhǔn)確度不高并且性能不穩(wěn)定的缺陷。
鑒于以上原因,本文結(jié)合瀝青路面自身復(fù)雜、噪點多、裂縫分布無規(guī)律等特點,提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)的瀝青路面裂縫識別方法,融合了CLAHE與深度學(xué)習(xí)算法。該方法在試驗過程中取得了優(yōu)良的效果,是一種可行性較高的方法,可以提高管養(yǎng)效率。
1 關(guān)鍵技術(shù)
1.1 卷積神經(jīng)網(wǎng)絡(luò)
卷積神經(jīng)網(wǎng)絡(luò)(CNN)表達能力強,由卷積層、池化層及全連接層疊加組成,層與層之間采用權(quán)值共享及局部連接方式。卷積層和池化層在上一層輸出的結(jié)果上進行下一輪計算,通過多層卷積和池化,逐漸抽象出高階特征,在擬合復(fù)雜特征方面有突出優(yōu)勢,是近幾年深度學(xué)習(xí)在機器視覺領(lǐng)域取得突破性進展的基石。
激活函數(shù)有Relu、Sigmoid等函數(shù),經(jīng)過卷積操作會輸出一定數(shù)量的新特征圖。
輸出的新特征圖進入到池化層進行池化操作,促使縮小特征圖,減小特征參數(shù),簡化計算復(fù)雜度,同時由于池化操作對局部位置不敏感,因此進一步為網(wǎng)絡(luò)引入了不變性。
1.2 CLAHE圖像增強算法
瀝青路面裂縫具有灰度值低、細(xì)長、分布無規(guī)律的特點。此外,受限于天氣因素和采集圖像時間,圖片通常表現(xiàn)為亮度不均且噪點多。因此,本文采用CLAHE[3]圖像增強算法突出裂縫部分。實現(xiàn)步驟如下:
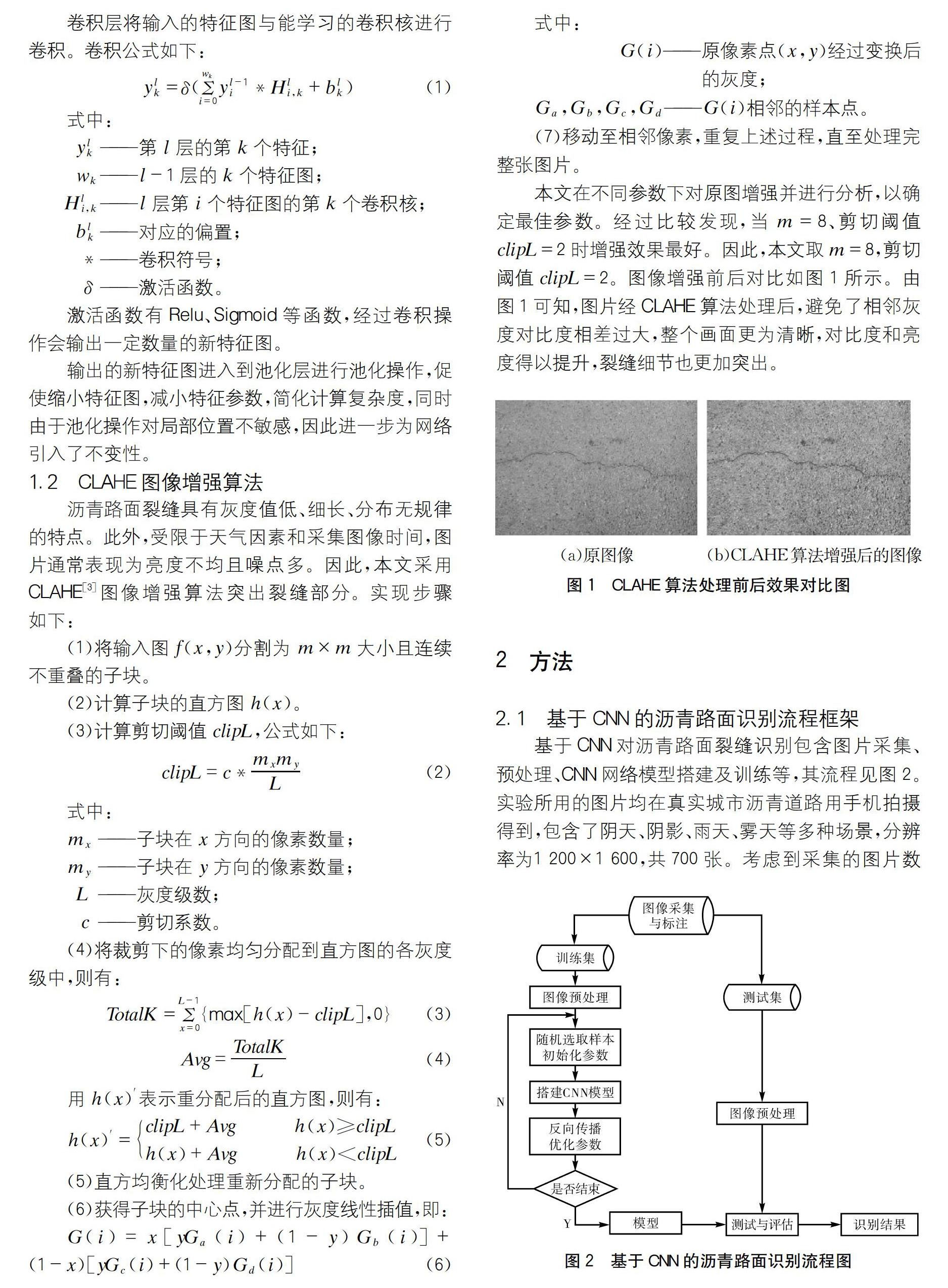
(7)移動至相鄰像素,重復(fù)上述過程,直至處理完整張圖片。
本文在不同參數(shù)下對原圖增強并進行分析,以確定最佳參數(shù)。經(jīng)過比較發(fā)現(xiàn),當(dāng)m=8、剪切閾值clipL=2時增強效果最好。因此,本文取m=8,剪切閾值clipL=2。圖像增強前后對比如圖1所示。由圖1可知,圖片經(jīng)CLAHE算法處理后,避免了相鄰灰度對比度相差過大,整個畫面更為清晰,對比度和亮度得以提升,裂縫細(xì)節(jié)也更加突出。
2 方法
2.1 基于CNN的瀝青路面識別流程框架
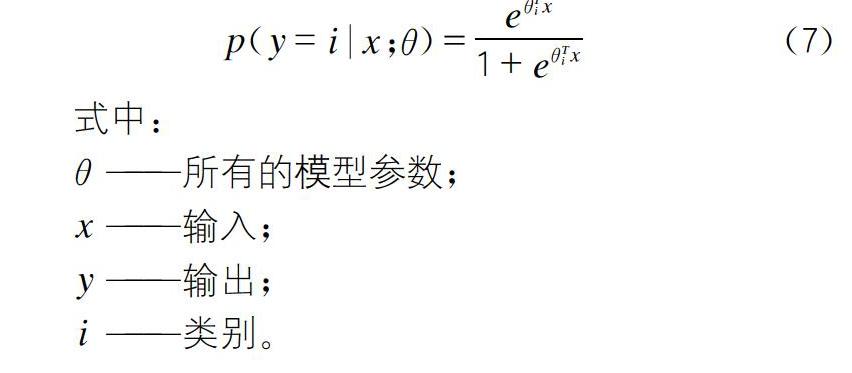
基于CNN對瀝青路面裂縫識別包含圖片采集、預(yù)處理、CNN網(wǎng)絡(luò)模型搭建及訓(xùn)練等,其流程見圖2。實驗所用的圖片均在真實城市瀝青道路用手機拍攝得到,包含了陰天、陰影、雨天、霧天等多種場景,分辨率為1200×1600,共700張。考慮到采集的圖片數(shù)量較少,并且裂縫在圖像中占比小,很難提取到裂縫的有效特征[4],另因圖片裁剪過小,給標(biāo)注帶來困難,故本文使用預(yù)處理圖像裁剪成像素為100×100的圖片,共15000張,并打上標(biāo)簽。使用keras框架搭建CNN網(wǎng)絡(luò)模型,訓(xùn)練過程采用隨機梯度下降。
2.2 基于卷積神經(jīng)網(wǎng)絡(luò)瀝青路面裂縫識別模型
針對交通環(huán)境下瀝青路面裂縫的特殊性,從多方面對模型結(jié)構(gòu)和超參數(shù)進行優(yōu)化調(diào)整,最終完成了瀝青路面裂縫分類器的構(gòu)建。如圖3所示,包含了4個卷積神經(jīng)網(wǎng)絡(luò)(C1~C4),4個池化層(P1~P4),4個歸一化層(B1~B4),1個全連接層(F1),1個Dropout層。另外,在卷積層后均使用了Relu激活函數(shù)。
(1)輸入層。本文將瀝青路面圖片作為輸入,大小為100×100,通道為1。
(2)卷積層。特征圖在卷積操作后,形成包含更高級更多抽象信息的新特征圖。C1~C4的卷積核數(shù)量分別為(32,64,64,128),對應(yīng)的卷積核尺寸依次為5×5,5×5,3×3,3×3。C1~C2層使用較大的卷積核,一方面有利于提取圖像中裂縫的結(jié)構(gòu)信息,另一方面有利于忽略與裂縫結(jié)構(gòu)無關(guān)的其他噪聲信息。
(3)池化層。新特征圖經(jīng)過池化層能減小特征參數(shù),減輕網(wǎng)絡(luò)模型過擬合現(xiàn)象。本文使用最大池化方式,池化大小為2×2,步長為1。
(4)歸一化層。對特征圖局部進行歸一化,能進一步矯正亮度不均,提取高階統(tǒng)計信息。因此,本文卷積層之后均添加了歸一化層。
(5)Dropout層。Dropout層的加入,使網(wǎng)絡(luò)在訓(xùn)練過程中隨機丟棄隱藏層的節(jié)點,輸出結(jié)果不過度依賴任一節(jié)點,起到正則化的作用,這種方式能有效防止網(wǎng)絡(luò)過擬合。因此,在全連層F1之后添加了Dropout層。Dropout取值為0.55。
(6)輸出層。通過Sigmoid回歸算法將輸出特征值映射到0~1之間,對應(yīng)相應(yīng)類別的條件概率。在Sigmoid回歸函數(shù)中y=i的概率為:
3 試驗結(jié)果分析
本文的算法基于深度學(xué)習(xí)開源框架keras,使用python語言開發(fā),依賴模塊主要有CV2、Skimage、Matlpotlib等,訓(xùn)練和測試階段使用的主要硬件設(shè)備為NIVIDIA公司的TitanXPascalGPU服務(wù)器,顯存為8G。
3.1 評價指標(biāo)
本文使用三個指標(biāo)評估所提出的方法:準(zhǔn)確率(P)、召回率(P)和F1值。其中準(zhǔn)確率(P)描述準(zhǔn)確檢測出的裂縫圖片占被檢測出來的像素的比例;召回率(R)描述正確被檢測出的裂縫圖片占總裂縫圖片的比例;而F1則能綜合判斷識別效果。三者的計算公式分別為:
3.2 試驗結(jié)果對比與分析
為驗證本文所提方法的有效性和可行性,設(shè)計了2組對比試驗。具體試驗分析如下:
試驗1:用于測試CLAHE算法對于本文所提模型準(zhǔn)確率的影響。首先,將裁剪成100×100像素大小并標(biāo)注好的5000張圖片組成數(shù)據(jù)集A,用于測試,其余10000圖片組成集合B,并按8∶2的比例構(gòu)建訓(xùn)練集、驗證集訓(xùn)練本文模型。然后使用CLAHE算法處理集合B中的訓(xùn)練集、驗證集,共同構(gòu)成數(shù)據(jù)集C,用來訓(xùn)練本文模型。最后隨機從集合A中選取1000張圖片測試訓(xùn)練好的模型。測試的結(jié)果如表1所示。由此可以看出,利用CLAHE算法處理后的數(shù)據(jù)訓(xùn)練模型顯著提升了裂縫識別效果,能保持較高的準(zhǔn)確率和召回率,而原始圖片訓(xùn)練的網(wǎng)絡(luò)識別準(zhǔn)確率低。這主要是由于CLAHE算法提升了圖像的質(zhì)量,突出了裂縫部分,有利于提取裂縫的參數(shù)信息,并減弱了影響識別的干擾因素。
試驗2:用于對比經(jīng)典Alex[5]網(wǎng)絡(luò)模型和本文模型對瀝青路面裂縫最終檢測結(jié)果的影響。首先,使用實驗1中集合C的數(shù)據(jù)集訓(xùn)練Alex網(wǎng)絡(luò)模型,接著使用滑窗方式將新采集的圖片分成像素為100×100小圖片,最后依次輸入到訓(xùn)練好的Alex網(wǎng)絡(luò)和本文模型,識別為裂縫則用黑框框出來。檢測結(jié)果如圖4所示。由實驗結(jié)果可知,基于本文模型的瀝青路面裂縫檢測結(jié)果非常逼近裂縫真實的區(qū)域,魯棒性好,對干擾噪聲的排除能力更強;而直接使用Alex模型將干擾信息誤認(rèn)為裂縫,準(zhǔn)確率較低。一方面是因為經(jīng)典Alex網(wǎng)絡(luò)模型專門針對像素為227×227圖像的識別模型,其識別性能的優(yōu)越性建立在大量訓(xùn)練樣本的基礎(chǔ)上,卷積層的卷積核個數(shù)非常多(依次為96,256,384,384,256),全連接層數(shù)量均為4096,而本文訓(xùn)練圖片數(shù)量相對較少,Alex網(wǎng)絡(luò)過度擬合了裂縫特征,把干擾誤認(rèn)為裂縫;另一方面本文建立的模型,針對輸入圖像尺寸,只使用4個卷積層,并優(yōu)化了各卷積核的數(shù)量及大小,以減小整個網(wǎng)絡(luò)的寬度,卷積層后均使用池化層減小參數(shù)量,除此之外,還使用了更多歸一化層減輕網(wǎng)絡(luò)過擬合現(xiàn)象。因此,相比而言,本文模型具有更好的泛化能力,更適合瀝青路面裂縫識別。
4 結(jié)語
本文提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)的瀝青路面裂縫識別方法,融合了CLAHE與深度學(xué)習(xí)算法,其中CLAHE算法增強了裂縫細(xì)節(jié)信息,為后續(xù)提取特征提供了基礎(chǔ)。基于CNN構(gòu)建的模型,結(jié)合瀝青路面裂縫自身特點,提取到了全面且具有辨別性的特征,具有良好的泛化能力。本文方法在多種場景能有效識別裂縫,對實現(xiàn)智慧化路面養(yǎng)護具有重要意義。
參考文獻:
[1]褚文濤,李鄭明,陸 鍵.路面病害檢測中的裂縫信息快速識別方法研究[J].中外公路,2013,33(6):80-84.
[HJ]
[2]ZhangA,LiQ,WangKCP,etal.Matchedfilteringalgorithmforpavementcrackingdetection[J].Transportationresearchrecord,2013,2367(1):30-42.
[3]ZuiderveldK.Contrastlimitedadaptivehistogramequalization[C].GraphicsgemsIV.AcademicPressProfessional,Inc.,1994.
[4]英 紅,丁海明,侯新月,等.基于BP神經(jīng)網(wǎng)絡(luò)的瀝青路面裂縫識別方法研究[J].河南理工大學(xué)學(xué)報(自然科學(xué)版),2018,37(4):105-111.
[5]KrizhevskyA,SutskeverI,HintonGE.Imagenetclassificationwithdeepconvolutionalneuralnetworks[C].Advancesinneuralinformationprocessingsystems,2012.
猜你喜歡
建材發(fā)展導(dǎo)向(2022年23期)2022-12-22 07:30:00
西部交通科技(2021年9期)2021-01-11 23:22:59
工程與建設(shè)(2019年2期)2019-09-02 01:34:18
建材發(fā)展導(dǎo)向(2019年11期)2019-08-24 06:36:22
經(jīng)濟技術(shù)協(xié)作信息(2018年8期)2019-01-14 03:06:34
鑿巖機械氣動工具(2017年3期)2017-11-22 07:21:44
上海公路(2017年1期)2017-07-21 13:38:33
工程建設(shè)與設(shè)計(2016年3期)2016-02-27 10:50:50
河南科技(2014年13期)2014-02-27 14:11:25
河南科技(2014年11期)2014-02-27 14:09:53