反臨作戰(zhàn)天海地一體化傳感器資源調(diào)度的挑戰(zhàn)與思考
2020-03-05 09:42:28邢清華高嘉樂
航空兵器 2020年1期
邢清華 高嘉樂
摘?要:著眼于未來臨近空間高超聲速目標(biāo)即將形成戰(zhàn)略威脅的發(fā)展趨勢,針對當(dāng)前天海地一體化傳感器資源協(xié)同調(diào)度問題進(jìn)行研究。首先,對臨近空間高超聲速目標(biāo)的運動特性、電磁特性和紅外特性進(jìn)行分析,并與其他類型導(dǎo)彈進(jìn)行對比。其次,從搭載平臺和工作方式兩個角度對傳感器探測跟蹤能力進(jìn)行分析。最后,總結(jié)并提出反臨作戰(zhàn)天海地一體化探測跟蹤調(diào)度任務(wù)的難點及對策,為未來構(gòu)建多維多平臺一體化傳感器網(wǎng)絡(luò)提供理論參考。
關(guān)鍵詞:臨近空間高超聲速飛行器;傳感器調(diào)度;探測跟蹤體系;反臨作戰(zhàn)
中圖分類號:TJ760;V271.4 文獻(xiàn)標(biāo)識碼:A文章編號:1673-5048(2020)01-0001-08
0?引言
臨近空間高超聲速飛行器(Near Space Hypersonic Vehicle,NSHV)是指能夠在20~100 km高度的臨近空間飛行,巡航飛行馬赫數(shù)為5~25,用于執(zhí)行全球快速精確打擊、遠(yuǎn)程投送、監(jiān)視偵察等戰(zhàn)略作戰(zhàn)任務(wù)的一類飛行器[1-2]。這種飛行器不僅具有與彈道導(dǎo)彈相似的超遠(yuǎn)距離攻擊和雷達(dá)橫截面(Radar Cross-Section,RCS)小的特點,還具有彈道導(dǎo)彈不具備的橫向大跨度機動的能力。因此,單一傳感器難以對其全程持續(xù)穩(wěn)定地跟蹤。整合現(xiàn)有傳感器資源,構(gòu)建天海地多源異構(gòu)傳感器一體化探測網(wǎng)絡(luò)是對高超聲速飛行器有效持續(xù)探測跟蹤的必然手段,是攔截超遠(yuǎn)距離武器的重要前提,而傳感器資源優(yōu)化調(diào)度是提高傳感器作戰(zhàn)效能的重要環(huán)節(jié)[3-4]。
1?臨近空間高超聲速飛行器目標(biāo)特性分析
1.1?運動特性
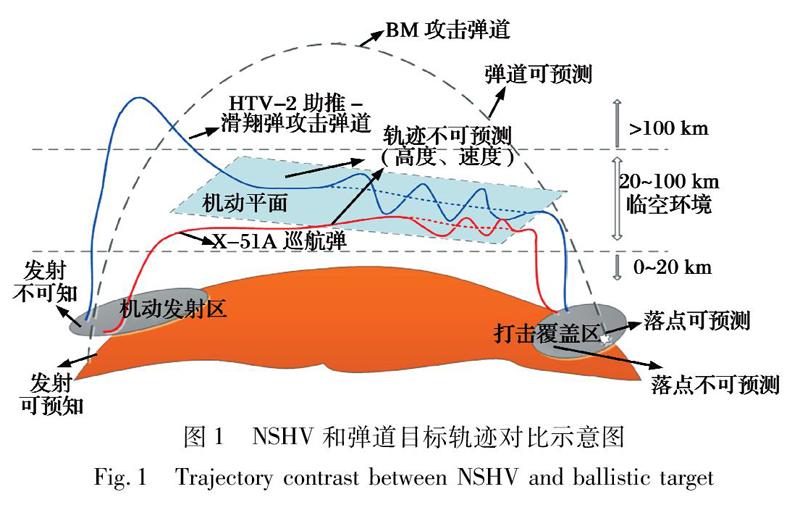
臨近空間高超聲速飛行器的飛行運動過程可以分為三個階段,分別是飛航段、滑躍段和再入滑翔段。圖1為典型臨近空間高超聲速飛行器和彈道導(dǎo)彈(Ballistic Missile,BM)目標(biāo)軌跡對比示意圖。在飛航段,運載平臺將高超聲速飛行器助推到一定高度,為飛行器在臨近空間飛行做準(zhǔn)備。滑躍段是高超聲速飛行器進(jìn)行遠(yuǎn)距離機動的主要階段,這個階段中飛行器高速高空的機動能力極大地提高了探測跟蹤傳感器調(diào)度的難度。在再入滑翔段,飛行器以高速無動力滑翔的形式從臨近空間到達(dá)地面目標(biāo)位置,并且具有一定的機動變軌能力。
在滑躍段,高超聲速飛行器以縱向“打水漂”的方式進(jìn)行超聲速滑躍飛行。由于氣動外形的設(shè)計不同,HTV-2和X-51A在滑躍段的彈道軌跡略有不同。HTV-2采用升力體氣動布局,需要在飛航段爬升至較高的高度,通過無動力滑行完成滑躍段飛行。X-51A采用乘波體氣動布局,在超燃沖壓發(fā)動機的推動下,依靠激波壓力產(chǎn)生升力,進(jìn)行無翼跳躍滑翔。此階段,臨空高超聲速飛行器的飛行馬赫數(shù)為5~20,在高速特性方面與彈道目標(biāo)相似,但是其飛行軌跡不可預(yù)測;飛行器在20~100 km高的臨近空間可以縱向跳躍滑翔和橫向大跨度機動,在機動特性方面與氣動目標(biāo)相似,但是高空高速的機動能力遠(yuǎn)超一般氣動目標(biāo)。從機動特性方面考慮,高超聲速飛行器與彈道目標(biāo)和氣動目標(biāo)都具有一定的相似性,但其探測跟蹤難度遠(yuǎn)超后兩者。
橫向機動是提升臨近空間高速機動目標(biāo)突防能力的有效手段。在臨近空間無動力飛行時,橫向機動方式為傾斜轉(zhuǎn)彎,機動能力主要由機體姿態(tài)和氣流的空間關(guān)系決定[5-6]。選定飛行器滑躍段的初始高度和攻角為60 km和10°,初始飛行馬赫數(shù)為20。傾側(cè)角在不同取值條件下,飛行器橫向機動航跡如圖2所示。
圖2中,飛行器橫向轉(zhuǎn)彎角度越大,其飛行距離越小,最大橫向機動距離為5 000 km,因此,飛行器在高空高速突防的過程中,傾側(cè)角越大,轉(zhuǎn)彎半徑越大,目標(biāo)的飛行距離越受限。
1.2?電磁特性
高速飛行的過程中,高溫致使周圍空氣發(fā)生電離,在灼燒表面材料的同時會在周圍形成一層電離層,即等離子鞘體。當(dāng)雷達(dá)波照射時,電磁波會形成多種折射、散射、衰減等離子體散射模式,使得雷達(dá)探測跟蹤難度增大[7]。依據(jù)等離子鞘體對雷達(dá)電磁波衰減計算方法[8],繪制P波段和X波段電磁波在等離子鞘體中衰減狀態(tài)如圖3~4所示。
從圖3和圖4中可以看出,頻率越高,最大衰減幅度越大。在X波段雷達(dá)頻率為10 GHz時,最大衰減為22 dB,約為發(fā)射信號功率的1/9,而P波段雷達(dá)頻率為0.5 GHz時,回波衰減僅有8 dB,約為入射信號的1/2。
1.3?紅外特性
高超聲速飛行器在臨近空間滑躍飛行的過程中,機體表面與空氣劇烈摩擦,氣動熱效應(yīng)產(chǎn)生了蒙皮輻射。飛行馬赫數(shù)為2~3時,蒙皮輻射占了整個目標(biāo)紅外輻射的絕大部分,隨著速度的增加,蒙皮輻射占比也劇烈增加[9-10]。對于紅外傳感器而言,蒙皮輻射可以更好地描繪出飛行器的本體輪廓,更有利于傳感器識別目標(biāo)并進(jìn)行特征分析。
圖5為高超聲速飛行器的高度和速度對蒙皮溫度的影響。從圖中可以看出,當(dāng)飛行器的飛行馬赫數(shù)為3時,蒙皮溫度在500 K左右,飛行器的高度對蒙皮溫度影響不大,但是飛行馬赫數(shù)達(dá)到10時,蒙皮溫度劇烈增加至4 000 K左右,飛行高度對蒙皮溫度的影響顯著,由此可以看出,速度是影響蒙皮溫度的主要因素。
依據(jù)文獻(xiàn)[9]提供的飛行器蒙皮輻射面積,取θV=0°,繪制不同紅外波段下溫度對紅外輻射強度的影響,如圖6所示。
從圖中可以看出,溫度對于短波紅外輻射強度影響最為劇烈,三個波段紅外輻射強度依次相差一個數(shù)量級。
1.4?與其他類型導(dǎo)彈對比分析
臨近空間高超聲速目標(biāo)與一般的空氣動力學(xué)目標(biāo)和彈道目標(biāo)具有顯著的差別。將三種目標(biāo)的目標(biāo)特性對比,如表1所示。
巡航導(dǎo)彈一般是在防區(qū)外發(fā)射,采取超低空突防的形式對地攻擊,如“戰(zhàn)斧”式巡航導(dǎo)彈,根據(jù)衛(wèi)星定位引導(dǎo)自身沿著固定的航線繞過防空區(qū)對地攻擊。目標(biāo)的紅外特性主要是尾焰,但是由于地面雜波干擾太大,不會采用紅外傳感器跟蹤目標(biāo)。巡航導(dǎo)彈本身RCS十分小,小于0.1 m2,飛行高度低,因此對于巡航導(dǎo)彈的探測主要依靠雷達(dá)前置部署進(jìn)行發(fā)現(xiàn),使目標(biāo)盡早發(fā)現(xiàn)盡早攔截[10]。
彈道導(dǎo)彈一般采用高拋式彈道,以近乎垂直式的攻擊角度在再入段高速突防,極大地縮短了防御武器的有效攔截時間,對于末段低層反導(dǎo)武器系統(tǒng),如“愛國者3”,其有效攔截時間僅有3~5 s。彈道目標(biāo)在再入段與大氣層劇烈摩擦,表面產(chǎn)生了等離子鞘體,使得地基雷達(dá)難以探測,洲際彈道導(dǎo)彈再入段的速度最大可以達(dá)到馬赫數(shù)25,攔截難度遠(yuǎn)大于巡航導(dǎo)彈。彈道目標(biāo)的自由段飛行高度最大可達(dá)1 200 km,盡管目標(biāo)在自由段的溫度不高,但是以深空背景探測時紅外特性明顯,因此彈道目標(biāo)飛行中段,探測跟蹤難度不大。但是彈道目標(biāo)飛行跨度大,受到地球曲率的影響,需要多傳感器協(xié)同探測[13]。
臨近空間高超聲速目標(biāo)的探測跟蹤和攔截的難度遠(yuǎn)大于前兩者。飛航段中,目標(biāo)的紅外特性與彈道目標(biāo)相似,都需要載荷平臺助推。但是在滑躍段,高超聲速目標(biāo)縱向以“打水漂”的樣式跳躍前進(jìn),同時,其氣動外形能夠使其橫向大范圍機動。以HTV-2為例,假設(shè)平均速度馬赫數(shù)10、機動能力1g、射程4 000 km時,目標(biāo)的轉(zhuǎn)彎半徑可以達(dá)到1 100 km,目標(biāo)落地時攻擊航向與落地點發(fā)射點連線幾乎垂直。也就是說,如果發(fā)射點在北方,高超聲速目標(biāo)可以在空中拐一個90°的彎,從正東或正西方向到達(dá)落地點。高超聲速飛行器高速飛行階段,與大氣層劇烈摩擦產(chǎn)生的等離子鞘體能夠極大地衰減電磁波,飛行速度越大,等離子鞘體對電磁波的衰減越大,因此,其電磁特性相比巡航導(dǎo)彈要弱。彈道目標(biāo)僅在再入段才能夠產(chǎn)生等離子鞘體,彈道目標(biāo)的探測跟蹤難度也小于高超聲速目標(biāo)。但是劇烈摩擦的同時,目標(biāo)表層溫度升高,表現(xiàn)出較強的紅外特性,紅外傳感器能夠在較遠(yuǎn)的距離探測跟蹤目標(biāo),然而受到地球曲率的影響,天基傳感器有效探測范圍有限。
2?傳感器資源探測性能分析
2.1?天基紅外傳感器
天基平臺可以分為大橢圓軌道衛(wèi)星(Highly Elliptical Orbit,HEO)、地球同步軌道衛(wèi)星(Geosynchronous Earth Orbit,GEO)和近地球軌道衛(wèi)星(Low Earth Orbit,LEO)三種。其中HEO和GEO的軌道高度高,因此兩者統(tǒng)稱為高軌衛(wèi)星[14]。
(1)高軌衛(wèi)星
HEO的軌道為大橢圓軌道,其遠(yuǎn)地點在北極上空,距離地平面大于36 000 km。探測跟蹤主要區(qū)域為北緯80°以上高緯地區(qū)。HEO處于遠(yuǎn)地點時,運行速度極慢,兩顆HEO即可滿足對北極地區(qū)24 h探測覆蓋。GEO為地球同步軌道衛(wèi)星,距離地平面大約36 000 km,三顆間隔120°的GEO通過全天候不間斷的探測掃描,即可完成對地球中低緯度地區(qū)的24 h探測覆蓋。
HEO和GEO主要針對高超聲速目標(biāo)的飛航段進(jìn)行探測預(yù)警。在飛航段,高超聲速目標(biāo)通過火箭或飛機運載到臨近空間進(jìn)行發(fā)射,此階段運載平臺的發(fā)動機具有較強的紅外特性,大橢圓軌道和地球同步軌道的紅外傳感器以地球為背景能夠探測跟蹤目標(biāo)。高超聲速目標(biāo)脫離運載平臺后,盡管在臨近空間與空氣摩擦產(chǎn)生了一定的紅外特性,但是由于距離較遠(yuǎn),目標(biāo)的紅外輻射在大氣中衰減極大,以地球為背景進(jìn)行探測的HEO和GEO無法探測到目標(biāo)飛航段以外的航跡信息,因此在反臨作戰(zhàn)過程中,HEO和GEO的職責(zé)是早期預(yù)警。
(2)低軌衛(wèi)星
軌道高度決定了衛(wèi)星載荷的使用方式。較低的軌道意味著更精準(zhǔn)的探測跟蹤能力,但也限制了其探測范圍。受地球曲率的影響,獨立LEO的探測范圍有限,需要通過多軌道多星構(gòu)建LEO星座,以達(dá)到多重覆蓋多角度監(jiān)視的目的。目前資料公開最為全面且已進(jìn)入實驗階段的是美國提出的天基紅外監(jiān)視系統(tǒng)(STSS)。STSS中的LEO以大傾角多軌道星座的形式部署,部署數(shù)量在24~30顆之間,軌道高度為1 600 km左右,通信方式采用星-星鏈路和星-地鏈路,有效載荷為寬視場短波紅外傳感器和窄視場多色跟蹤型傳感器[15]。
寬視場短波紅外傳感器主要探測以地球為背景的處于飛航段的目標(biāo)。在飛航段,目標(biāo)的運載平臺依靠發(fā)動機將目標(biāo)運送至較高發(fā)射位置,運載平臺發(fā)動機尾部發(fā)出明亮的火焰,短波紅外傳感器能夠捕獲目標(biāo),因此短波紅外傳感器的主要工作方式為對地掃描,增加重點區(qū)域的監(jiān)視時間。跟蹤型傳感器的主要工作是以深空為背景跟蹤高超聲速目標(biāo)。在飛航段結(jié)束后,目標(biāo)在臨近空間進(jìn)行遠(yuǎn)距離飛行(滑躍階段),并在到達(dá)目標(biāo)上空后以無動力滑翔的方式落地(再入段),在這兩個階段目標(biāo)的紅外輻射主要是中長波。由于地表的紅外輻射較強,對地觀測已經(jīng)難以捕獲目標(biāo),需要以深空為背景的中長波和可見光傳感器才能夠捕獲目標(biāo)。LEO跟蹤型傳感器探測范圍示意圖如圖7所示。
圖7中虛線為目標(biāo)飛行軌跡,藍(lán)色區(qū)域為跟蹤型傳感器可探測范圍。天基傳感器正下方為寬視場短波紅外傳感器的探測范圍,可探測到AMB區(qū)域中處于飛航段的目標(biāo)。跟蹤型傳感器需要以深空為背景進(jìn)行探測,因此傳感器的俯仰角度為∠FMG和∠IMJ,可探測目標(biāo)航行區(qū)間段為弧CEG和弧DHJ。假設(shè)LEO軌道高度1 600 km,地球半徑6 371 km,目標(biāo)在100 km高度勻速直線飛行,那么LEO的深空背景探測角度∠FMG不到1°。
紅外傳感器的工作方式與雷達(dá)傳感器不同,紅外傳感器通過照射的方式發(fā)現(xiàn)目標(biāo),單獨的紅外傳感器僅僅能夠提供目標(biāo)與傳感器的角度,并不能得到兩者之間的距離,因此無法計算出目標(biāo)的準(zhǔn)確位置信息,僅能夠提供目標(biāo)的方向信息,即目標(biāo)大致的攻擊方向。如果天基高軌衛(wèi)星發(fā)現(xiàn)目標(biāo)后,高軌衛(wèi)星將目標(biāo)的初始信息交接給可探測目標(biāo)區(qū)域的LEO,LEO的跟蹤型傳感器開啟“捕獲”模式,對目標(biāo)可能的空域進(jìn)行掃描,當(dāng)截獲到目標(biāo)后,LEO跟蹤型傳感器切換為“跟蹤”模式,以凝視的方式跟蹤目標(biāo)。如果是LEO掃描型傳感器對地觀測時發(fā)現(xiàn)目標(biāo),則將目標(biāo)的區(qū)域信息發(fā)給臨近的LEO,臨近的LEO跟蹤型傳感器截獲并跟蹤目標(biāo)[16]。當(dāng)有兩顆LEO同時跟蹤一個目標(biāo)時,通過兩個LEO的角度信息以及自身的位置,可以計算出目標(biāo)的位置信息,地面接收站在獲得目標(biāo)的位置信息后,通過計算目標(biāo)的位置、速度和加速度等運動信息以及獲得的目標(biāo)紅外特性,能夠進(jìn)一步對目標(biāo)進(jìn)行識別,得到目標(biāo)可能的威脅方式、來襲方向、可能攻擊目的等信息。
2.2?地/海基雷達(dá)傳感器
雷達(dá)探測跟蹤目標(biāo)能力主要受目標(biāo)運行特性和電磁特性的影響。目標(biāo)的電磁特性對雷達(dá)的影響主要體現(xiàn)在隱身外形設(shè)計和高速飛行等離子鞘體對雷達(dá)電磁波的衰減,使得雷達(dá)接收的目標(biāo)信號十分弱小,很容易淹沒在雜波信號中。目標(biāo)的運動特性對于雷達(dá)的影響主要在于目標(biāo)的高超聲速,過快的速度極大地縮短了地基雷達(dá)的觀測時間窗口[17]。
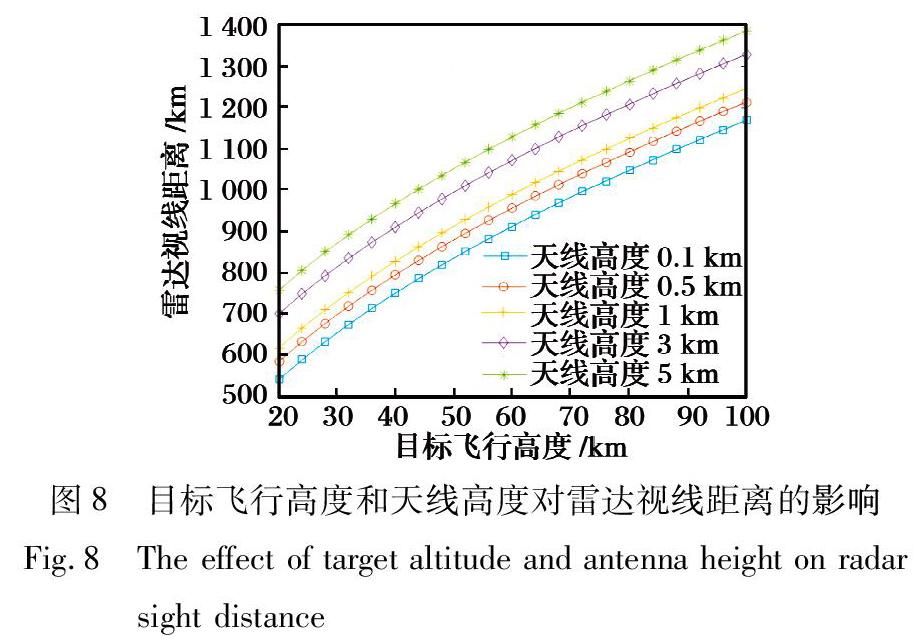
受地球曲率的影響,雷達(dá)探測空域范圍十分有限,最遠(yuǎn)的探測距離與目標(biāo)的飛行高度和自身天線高度有關(guān)。雷達(dá)可視距離的計算方法為
天線高度和目標(biāo)飛行高度對雷達(dá)視線距離的影響如圖8所示。從圖中可以看出,較高的雷達(dá)天線設(shè)計和較高的目標(biāo)飛行高度能夠提高雷達(dá)發(fā)現(xiàn)目標(biāo)的最遠(yuǎn)視線距離。但是高超聲速飛行器的滑躍高度主要是30~70 km,一般的地/海基大型雷達(dá)的高度在1 km左右,因此,發(fā)現(xiàn)目標(biāo)的最遠(yuǎn)距離在1 000 km左右。
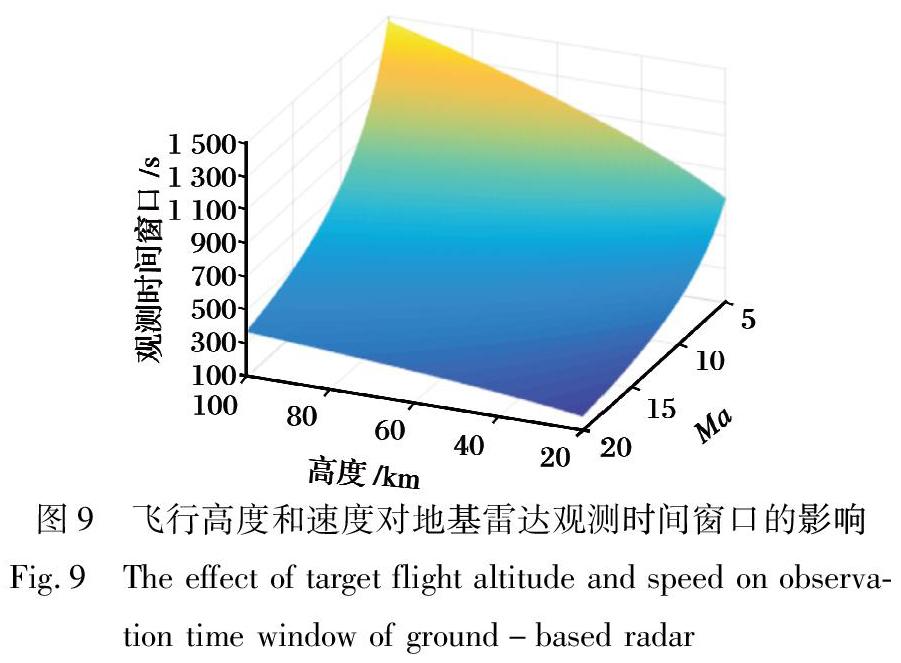
假設(shè)目標(biāo)與雷達(dá)的航路角為0°,即目標(biāo)的飛行路線經(jīng)過雷達(dá)正上空,雷達(dá)探測的方位角范圍為0°~360°,俯仰角范圍為0°~90°,目標(biāo)速度和高度對于雷達(dá)觀測時間窗口的影響如圖9所示。從圖中可以看出,對飛行馬赫數(shù)20,飛行高度20 km的目標(biāo),在經(jīng)過雷達(dá)探測范圍路徑最長的情況下,觀測時間窗口為181 s。由此可見,高超聲速飛行器的速度對地基雷達(dá)探測跟蹤的反應(yīng)時間影響極大,越快的速度,對雷達(dá)的反應(yīng)時間要求越高。
3?反臨作戰(zhàn)傳感器資源調(diào)度的難點分析
結(jié)合臨近空間高超聲速飛行器的目標(biāo)特性以及天/海/地基傳感器的探測性能,可以得出反臨作戰(zhàn)預(yù)警探測跟蹤傳感器資源調(diào)度的難點。
(1)探測跟蹤難
現(xiàn)有的反臨作戰(zhàn)傳感器資源主要是地/海基雷達(dá)傳感器和天基紅外傳感器。
對于雷達(dá)傳感器來說,臨近空間高超聲速飛行器的隱身外形設(shè)計極大降低了雷達(dá)的監(jiān)測檢測概率,目標(biāo)在臨近空間中高速飛行產(chǎn)生的等離子鞘體,更是能夠進(jìn)一步影響雷達(dá)的電磁衰減和散射,使得地/海基雷達(dá)探測跟蹤難度進(jìn)一步增加。盡管現(xiàn)有的雷達(dá)能夠?qū)崿F(xiàn)上千公里的探測能力,但是受到地球曲率和雷達(dá)探測俯仰角度的限制,高空高速目標(biāo)的可視時間窗口十分有限。
對于天基紅外傳感器來說,受限于傳感器能力,HEO和GEO主要用于探測,LEO主要用于跟蹤,但是受地球曲率和目標(biāo)飛行高度的限制,LEO跟蹤型傳感器的可用俯仰角不到1°,且需要兩顆衛(wèi)星同時觀測才能實施精準(zhǔn)定位。文獻(xiàn)[18]研究了LEO部署對深空背景下探測漏洞的影響,從其研究結(jié)果中可以看出,不同的部署形式下不同高度的探測漏洞不同,但總體來說,要實現(xiàn)無漏洞的全球覆蓋需要的衛(wèi)星數(shù)量遠(yuǎn)多于STSS計劃的28顆星的數(shù)量。
綜上所述,對于天/海/地基傳感器來說,實現(xiàn)精準(zhǔn)探測和全程穩(wěn)定持續(xù)跟蹤是極其困難的,需要大量的多源異構(gòu)傳感器合理部署。
(2)傳感器交接頻繁
高超聲速目標(biāo)在臨近空間飛行,相比于彈道目標(biāo),它更“貼近地表”飛行,目標(biāo)的飛行高度限制了傳感器的探測范圍。越小的探測跟蹤范圍,意味著需要更多的傳感器交替跟蹤,才能實現(xiàn)更完整的飛行軌跡跟蹤。
傳感器交接時,需要依據(jù)上一個傳感器的探測跟蹤信息計算傳感器交接的時刻、交接區(qū)域以及誤差信息,在交接時刻,下一個傳感器對交接區(qū)域進(jìn)行快速連續(xù)的掃描。如果交接傳感器能夠捕獲目標(biāo),則開始建立航跡,計算并跟蹤目標(biāo)飛行軌跡。但是高超聲速飛行器高速飛行且擁有橫向大空域機動能力,傳感器交接時刻和位置預(yù)測難度大,計算結(jié)果精度低,這就導(dǎo)致了在交接時,可能由于交接區(qū)域太大導(dǎo)致目標(biāo)高速穿過交接區(qū)域,而傳感器并沒有掃描到,也就是穿屏問題。穿屏問題對于軌道相對固定的彈道目標(biāo)是一個重要跟蹤難題,它對于可機動變軌飛行的高超聲速目標(biāo)來說難度更大。穿屏問題極大地降低了目標(biāo)穩(wěn)定跟蹤的概率,若交接失敗,重新搜索目標(biāo)需要消耗的時間和傳感器資源將無法估計。
(3)調(diào)度方案動態(tài)變化
目標(biāo)航向、目標(biāo)數(shù)量、傳感器資源使用狀態(tài)、戰(zhàn)場干擾等很多不確定因素,都會影響傳感器調(diào)度方案的動態(tài)變化,此外,現(xiàn)代多兵種、多體系協(xié)同攻擊的作戰(zhàn)模式,使得天/海/地傳感器必須留有空余探測跟蹤資源用來探測其他類型的目標(biāo),如彈道目標(biāo)在飛行過程中產(chǎn)生的伴飛假目標(biāo)、多彈頭等。戰(zhàn)場不確定因素和其他作戰(zhàn)任務(wù)的影響,使得有限數(shù)量的傳感器在資源沖突條件下最大化使用的難度增大。目前裝備上對于多任務(wù)處理通常采用預(yù)留通道的手段,但是面對不同作戰(zhàn)對象在不同作戰(zhàn)條件下,威脅目標(biāo)的數(shù)量、種類和進(jìn)攻方式都是不同的,這種方法盡管可以避免高威脅目標(biāo)突發(fā)性攻擊時無傳感器資源探測跟蹤,但也是面對飽和攻擊時制約傳感器最大化利用率的限制因素。
4?反臨作戰(zhàn)傳感器資源調(diào)度的思考
通過上述分析,現(xiàn)有體系下天海地多平臺一體化的信息網(wǎng)探測跟蹤任務(wù)調(diào)度的難點,主要是目標(biāo)特性造成的探測跟蹤捕獲難、傳感器探測范圍有限導(dǎo)致的傳感器交接頻繁、戰(zhàn)場不確定因素引起的調(diào)度方案動態(tài)變化。因此,反臨作戰(zhàn)天海地一體化傳感器資源調(diào)度作戰(zhàn)效能的提升,需要從硬實力和軟實力兩個角度對傳感器能力、體系架構(gòu)和高效的算法進(jìn)行探索和研發(fā)。
(1)提高傳感器能力是探測跟蹤體系發(fā)展的核心
由于地球曲率的影響,天基傳感器相比其他傳感器具有更好的觀測角度,但是受到載荷的限制,天基傳感器的能力始終無法與地基傳感器相比較。天基平臺和天基傳感器的研制和發(fā)展將極大地提升天海地一體化探測跟蹤網(wǎng)絡(luò)的觀測容量、觀測精度,進(jìn)而為反臨作戰(zhàn)提供更加精確的目標(biāo)信息。
現(xiàn)有的傳感器探測跟蹤能力指標(biāo),主要是針對彈道目標(biāo)設(shè)計的,如彈道目標(biāo)在中段飛行的溫度低,只能以深空背景進(jìn)行探測。但是高超聲速目標(biāo)與大氣劇烈摩擦,在整個飛行過程中都表現(xiàn)出極強的紅外特性,設(shè)計具有更強針對性的傳感器將極大地擴充傳感器探測可視空間和時間,提高整個探測跟蹤體系的作戰(zhàn)能力。
(2)合理的體系架構(gòu)是探測跟蹤資源優(yōu)化調(diào)度的基礎(chǔ)
種類不同、型號不同的傳感器,工作方式和信息傳輸方式是不同的。天基傳感器需要星-星鏈路和星-地鏈路的數(shù)據(jù)傳輸,地面控制站才能夠與天基平臺進(jìn)行信息交互和指揮控制;地基傳感器通過“雷達(dá)控制器”對威脅目標(biāo)的探測時間、空間、能力和信號等多種資源進(jìn)行調(diào)控。此外,不同生產(chǎn)廠家采用的通信協(xié)議數(shù)據(jù)格式也是有差異性的,在過去“煙囪式”發(fā)展的基礎(chǔ)上搭建一個通用的指揮控制通信體系架構(gòu)是很困難的,美國海軍開發(fā)的協(xié)同作戰(zhàn)能力(Cooperative Engagement Capability,CEC)系統(tǒng)耗費了10年時間。
體系架構(gòu)必須要考慮傳感器、計算機技術(shù)和算法的迭代發(fā)展。因此,完善的體系架構(gòu)必須具備新型傳感器加入的可擴展性,算法程序升級的迭代性,任意武器系統(tǒng)或傳感器具有與探測跟蹤體系進(jìn)行信息交互的即插即用性和兼容性。
(3)高效的調(diào)度算法是探測跟蹤體系作戰(zhàn)效能的倍增器
隨著戰(zhàn)場環(huán)境數(shù)據(jù)質(zhì)量和數(shù)量的激增,現(xiàn)代戰(zhàn)爭對武器系統(tǒng)的反應(yīng)速度、信息處理速度以及指揮控制的精準(zhǔn)程度提出了越來越多的要求。高效的調(diào)度算法是現(xiàn)代化信息戰(zhàn)制勝的必要條件,更是反臨作戰(zhàn)探測跟蹤體系構(gòu)建的前提。探測跟蹤體系調(diào)度不僅需要考慮戰(zhàn)時傳感器資源約束、威脅目標(biāo)攻擊意圖、動態(tài)戰(zhàn)場態(tài)勢等多種調(diào)度要素,還要依據(jù)傳感器工作模式和作戰(zhàn)模式設(shè)計具有交鏈深度高、協(xié)同程度高的任務(wù)調(diào)度算法。調(diào)度算法不止是在決策層對調(diào)度任務(wù)簡單的分配,更應(yīng)該涉及到與反臨作戰(zhàn)相關(guān)的可能作戰(zhàn)任務(wù)以及對傳感器自身探測跟蹤資源深度規(guī)劃的考慮。
5?結(jié)?束?語
天海地一體化傳感器資源調(diào)度是反臨作戰(zhàn)中指揮控制多源異構(gòu)傳感器協(xié)同探測跟蹤的關(guān)鍵環(huán)節(jié),是獲取臨近空間高超聲速目標(biāo)狀態(tài)信息的重要方法。本文對臨近空間高超聲速飛行器的目標(biāo)特性和反臨作戰(zhàn)傳感器資源探測性能進(jìn)行了簡要分析,提出并總結(jié)了反臨作戰(zhàn)傳感器資源調(diào)度的難點和對策,以期為反臨作戰(zhàn)預(yù)警探測研究提供指導(dǎo)。
參考文獻(xiàn):
[1] 孫文,王剛,姚小強,等.臨空高超聲速飛行器目標(biāo)特性分析[J].火力與指揮控制,2017,42(1):14-20.
Sun Wen,Wang Gang,Yao Xiaoqiang,et al. Target Characteristics Analysis of Near Space Hypersonic Vehicle[J]. Fire Control & Command Control,2017,42(1):14-20.(in Chinese)
[2] 胡冬冬,劉曉明,張紹芳,等. 2016年國外高超聲速飛行器技術(shù)發(fā)展綜述[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù),2017(1):28-33.
Hu Dongdong,Liu Xiaoming,Zhang Shaofang,et al. Review of the Development of Hypersonic Vehicle Technology Abroad in 2016[J]. Tactical Missile Technology,2017(1):28-33.(in Chinese)
[3] Icolari V,Tarchi D,Guidotti A,et al. Genetic Inspired Scheduling Algorithm for Cognitive Satellite Systems[C]∥ 2016 IEEE International Conference on Communications,Kuala Lumpur,Malaysia,2016.
[4] Zhu Waiming,Hu Xiaoxuan,Xia Wei,et al. A TwoPhase Genetic Annealing Method for Integrated Earth Observation Satellite Scheduling Problems[J]. Soft Computing:A Fusion of Foundations,Methodologies and Applications,2017,23(1):181-196.
[5] 李曉剛,王玉惠,吳慶憲. 高超聲速飛行器飛行動力學(xué)特性研究[J]. 吉林大學(xué)學(xué)報:信息科學(xué)版,2016,34(3):367-373.
Li Xiaogang,Wang Yuhui,Wu Qingxian. Study of Flight Dynamics Characteristics of Hypersonic Vehicles[J]. Journal of Jilin University:Information Science Edition,2016,34(3):367-373.(in Chinese)
[6] 邵雷,雷虎民,趙宗寶. 臨近空間高超聲速飛行器軌跡跟蹤控制研究[J]. 四川大學(xué)學(xué)報:自然科學(xué)版,2015,52(1):79-84.
Shao Lei,Lei Humin,Zhao Zongbao. Research on Trajectory Tracking Control for the NearSpace Hypersonic Flight Vehicle[J]. Journal of Sichuan University:Natural Science Edition,2015,52(1):79-84.(in Chinese)
[7] 付強,王剛,郭相科,等. 臨空高速目標(biāo)協(xié)同探測跟蹤需求分析[J]. 系統(tǒng)工程與電子技術(shù),2015,37(4):757-762.
Fu Qiang,Wang Gang,Guo Xiangke,et al. Requirements Analysis on Collaborative Detection and Tracking of Near Space HighSpeed Targets[J]. Systems Engineering and Electronics,2015,37(4):757-762.(in Chinese)
[8] 楊玉明,王紅,譚賢四,等. 再入等離子體隱身及反隱身分析[J]. 空軍雷達(dá)學(xué)院學(xué)報,2012,26(4):248-251.
Yang Yuming,Wang Hong,Tan Xiansi,et al. Analysis of Reentry Plasma Stealth and AntiStealth[J]. Journal of Air Force Radar Academy,2012,26(4):248-251.(in Chinese)
[9] 呂建偉,王強. 飛行器蒙皮紅外輻射特征的反向蒙特卡羅計算與分析方法[J]. 紅外與激光工程,2009,38(2):232-237.
Lü Jianwei,Wang Qiang. Numerical Calculation and Analysis of Infrared Radiation Characteristics from Aircraft Skin by Using RMC Method[J]. Infrared and Laser Engineering,2009,38(2):232-237.(in Chinese)
[10] 劉景生. 紅外物理[M]. 北京:兵器工業(yè)出版社,1992.
Liu Jingsheng. Infrared Physics[M]. Beijing:Publishing House of?Ordnance Industry,1992.(in Chinese)
[11] 周方方,張二磊,陳宜峰. 臨近空間高超聲速飛行器紅外特性建模仿真[J]. 紅外技術(shù),2017,39(8):746-750.
Zhou Fangfang,Zhang Erlei,Chen Yifeng. Infrared Simulation of Near Space Hypersonic Vehicle[J]. Infrared Technology,2017,39(8):746-750.(in Chinese)
[12] 周偉,董揚帆. 2016年國外巡航導(dǎo)彈發(fā)展分析[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù),2017(3):12-17.
Zhou Wei,Dong Yangfan. Development Analysis of Foreign Cruise Missile in 2016[J]. Tactical Missile Technology,2017(3):12-17.(in Chinese)
[13] 陳方予,陳晗,張東俊,等. 滑翔變軌飛行彈道導(dǎo)彈突防問題思考[J]. 航天電子對抗,2018,34(3):5-8.
Chen Fangyu,Chen Han,Zhang Dongjun,et al. Study on Orbital Maneuver Gliding Flight Ballistic Missile Penetration[J]. Aerospace Electronic Warfare,2018,34(3):5-8.(in Chinese)
[14] 熊瑛,齊艷麗,才滿瑞. 美國全球一體化反導(dǎo)系統(tǒng)發(fā)展分析[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù),2017(3):8-11.
Xiong Ying,Qi Yanli,Cai Manrui. Development of US Global Integrated Missile Defense System[J]. Tactical Missile Technology,2017(3):8-11.(in Chinese)
[15] 張萬層,陳津,高原. 美國紅外預(yù)警衛(wèi)星系統(tǒng)發(fā)展概述[J]. 兵工自動化,2018,37(6):1-5.
Zhang Wanceng,Chen Jin,Gao Yuan. Development Overview for Systems of US Infrared Early Warning Satellites[J]. Ordnance Industry Automation,2018,37(6):1-5.(in Chinese)
[16] 王虎. 美國天基紅外系統(tǒng)發(fā)展研究[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù),2018(3):19-23.
Wang Hu. Research on Development of American Space Based Infrared System[J]. Tactical Missile Technology,2018(3):19-23.(in Chinese)
[17] 梁延峰,楊云祥. 美國海上預(yù)警探測系統(tǒng)發(fā)展研究[J]. 中國電子科學(xué)研究院學(xué)報,2016,11(1):7-14.
Liang Yanfeng,Yang Yunxiang. The Research of American Sea Based Early Warning and Detection System[J]. Journal of China Academy of Electronics and Information Technology,2016,11(1):7-14.(in Chinese)
[18] 劉冰.低軌星座觀測漏洞與傳感器調(diào)度方法研究[D].長沙:國防科學(xué)技術(shù)大學(xué),2011.
Liu Bing.Research on Observation Gaps and Sensor Management of LowEarth Orbit Constellation[D].Changsha:National University of Defense Technology,2011.(in Chinese)
