基于三坐標測量機的機器人位姿精度檢測方法
2020-03-11 13:56:06唐宇存李錦忠林安迪匡紹龍
計算機工程與應用 2020年5期
唐宇存,李錦忠,林安迪,匡紹龍
蘇州大學 機電工程學院,江蘇 蘇州215000
1 引言
手術機器人的一個主要應用就是將其作為定位設備,輔助醫生操作手術工具完成高精度手術操作[1-2]。特別是在腦外科、穿刺、脊柱、創傷等外科手術領域,機器人在導航引導下運行到規劃位置,其定位精度的高低直接影響到手術的成敗[3-4]。因此,機器人定位精度檢測是導航引導定位類手術機器人研發的一個重要內容。通常,在這種以定位為主的手術機器人使用環境中,醫生根據病人影像規劃出手術工具切入點的位姿(位置和姿態),然后通過導航器測量出機器人末端手術工具當前位姿與規劃位姿的相對關系,再將機器人運動到規劃位姿,以實現手術的高精度定位[5]。在這一過程中,導航規劃的相對位姿與機器人實際運動相對位姿的一致程度以及機器人多次運動相對位姿的離散程度,即位姿距離準確度與重復性[6],決定了機器人定位精度的高低[7-8]。因而檢測機器人的位姿距離準確度與重復性,就可以判斷機器人是否滿足這種以定位為主的手術場合的需求。
關于機器人位姿距離精度檢測,國家標準《工業機器人:性能規范及其試驗方法》[6](以下簡稱國標)就工業機器人的精度檢測方法進行了描述和規定,并提供了諸如激光跟蹤儀、三坐標測量機等設備檢測工業機器人性能的方法。其中,激光跟蹤儀因其高精度且采用無接觸測量而獲得廣泛應用[9-10]。但其價格昂貴、維護和使用要求高,對一般中小型機器人研發企業和機加工企業而言,很難會擁有這樣的設備,這給機器人生產制造過程中精度的測量帶來困難。三坐標測量機是中小型機加工企業常用的零部件精度檢測設備,因其不具備測量絕對位置精度以及姿態精度的能力,不能直接作為機器人位姿精度檢測工具。然而一些研究者針對特定場合,使用三坐標測量機進行機器人位置精度檢測,如姚興田等人[11]利用三坐標測量機測量機器人末端的運動距離,并基于此計算位置距離準確度,該方法很好地避免了測量系統與機器人系統的坐標變換,只是沒有提出解決姿態精度測量的方法。
基于此,本文在介紹導航引導的手術機器人定位原理基礎上,提出基于三坐標測量機的機器人位姿距離精度測量方法,并設計了機器人末端姿態測量工具,實現機器人姿態的測量,從而降低機器人檢測對激光跟蹤儀等價格高昂且難以維護設備的需求,達到制造廠商內部完成機器人精度檢測的目的。
2 基于導航引導的手術機器人定位原理
基于導航引導的機器人輔助外科手術(Robot Assisted Surgery,RAS)系統[12-13]的基本原理如圖1 所示。其中,R(Robot)表示機器人坐標系,NAV(Navigator)表示RAS 系統中的導航器坐標系,即RAS 系統的全局坐標系。CA(C-Arm)、EE(End Effector)、SO(Surgical Object)、VO(Virtual Object)分別表示X光成像設備、手術工具末端效應器、手術對象、虛擬對象等術中各要素的坐標系。并且EE、SO 能被NAV 實時追蹤,以實現術中各要素的位置相對于NAV的統一表達(如公式(1))。手術時,醫生利用成像設備掃描病灶部位得到其圖像模型,并在RAS系統中利用坐標變換完成術前規劃、術中影像以及各要素位姿的注冊工作,進而醫生依據電腦中導航系統的顯示來控制及跟蹤機器人末端位姿,以此確定機器人最終位姿是否滿足要求[14]。
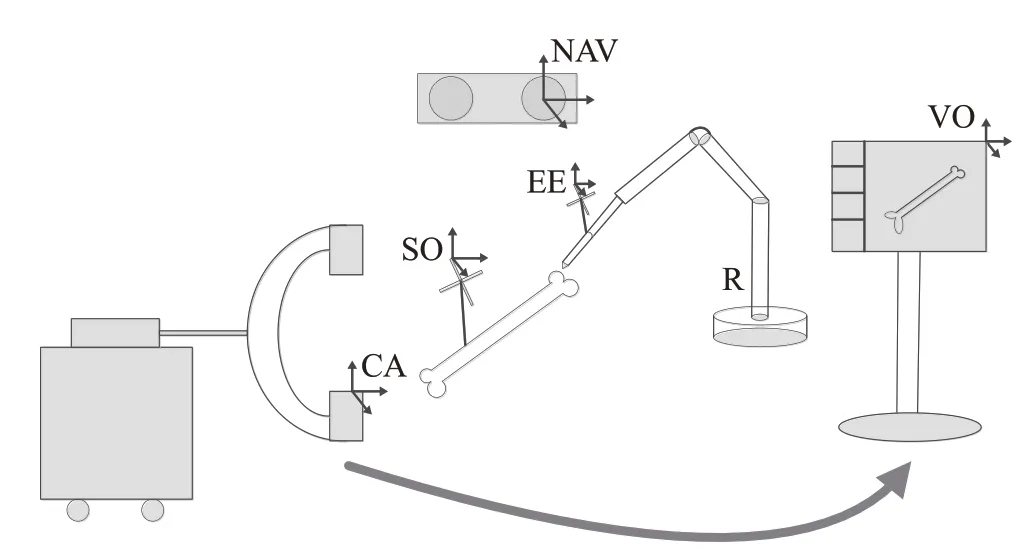
圖1 RAAS系統原理示意圖
實際操作過程中,為方便計算及表達,手術工具規劃位姿相對于手術對象SO,可表示為。其中,EEd表示醫生規劃的手術工具坐標系。假定在導航器NAV下的手術工具當前坐標系EE 和手術對象坐標系SO 分別表示為和,那么手術工具當前位姿相對于SO可表示為:

手術工具規劃位姿相對于EE可以表達為:


3 基于三坐標測量機的位姿距離精度檢測方法
3.1 基本原理
基于三坐標測量機檢測機器人位姿距離精度的基本原理如圖2 所示。其中,R 表示機器人坐標系,CMM(Coordinate Measuring Machine)表示三坐標測量機坐標系,E表示機器人末端當前坐標系,Ed表示機器人末端目標坐標系。假定機器人末端初始位姿在機器人坐標系R 和三坐標測量機坐標系CMM 下分別表示為和。給定機器人目標位姿,那么該目標位姿相對于E可表示為:


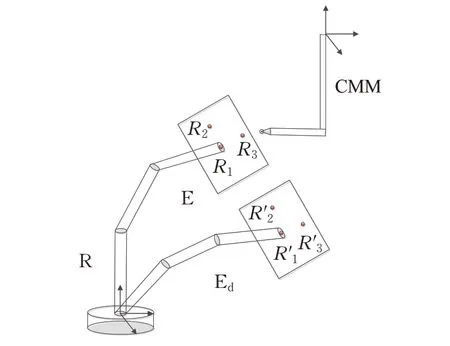
圖2 三坐標測量機測量原理示意圖
對比公式(3)、(5)可知,基于三坐標測量機檢測機器人相對位姿精度原理與基于導航引導手術機器人定位原理相一致。給定目標位姿相當于在醫療環境下醫生規劃好的機器人入刀位姿,而可以認為是機器人實際切入點的位姿。位姿距離準確度表示與的偏差,位姿距離重復性表示機器人重復到達EE′dT的波動范圍,通過計算這兩個量可以衡量機器人相對位姿精度的高低。因此,三坐標測量機測量出的機器人位姿距離精度,可以看作實際手術過程中機器人的定位精度。
3.2 位姿測量原理
為使三坐標測量機能夠測量機器人末端姿態,本文利用在一個平面上的3個標準球(R1,R2,R3)設計了一個笛卡爾坐標系(如圖3,R1為坐標原點,R1R2作為x 軸,垂直于平面的向量作為z 軸,根據右手定則得到y軸),安裝于機器人的法蘭平面上,稱作法蘭坐標系,用FL(Flange)表示。圖3中RE(Robot End)為機器人末端坐標系。
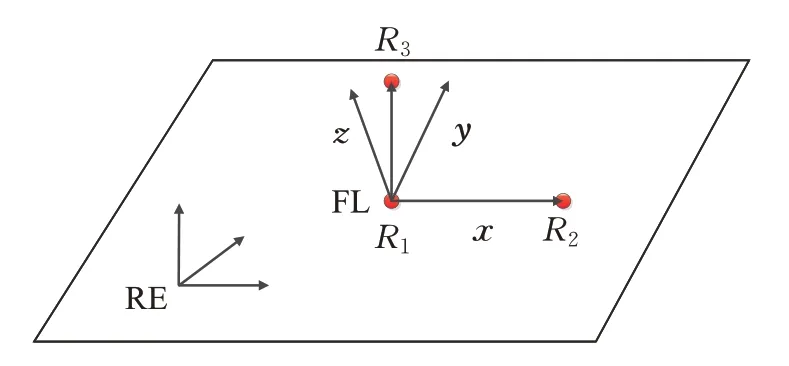
圖3 法蘭坐標系
根據文獻[15]中的坐標系建立方法得到相對于三坐標測量機坐標系的法蘭坐標系。由于法蘭坐標系FL與機器人末端坐標系RE的關系是已知的,則三坐標測量機下的機器人末端位姿為:

本文采用Z-Y-X歐拉角[16]表示機器人末端姿態:
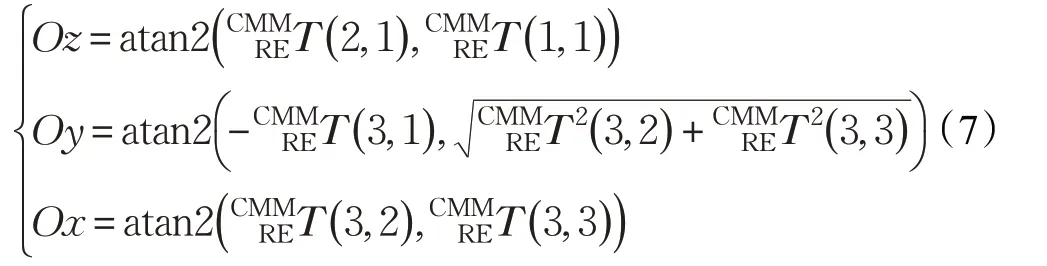
至此,只要利用三坐標測量機測量機器人末端平面上3個標準球的位置,就可以得到機器人末端位姿。
3.3 位姿距離精度測量過程及計算方法
按照國標規定的位姿距離準確度和重復性測量方法,在機器人工作空間內選取m個目標位姿( )
P1,P2,…,Pm,然后通過人工數據輸入的方式將機器人運動至位姿Pm,該位姿作為機器人的起始位姿。再將機器人按照P1→P2→…→Pm的順序循環運動n 次,通過三坐標測量機測量并記錄每個位姿的標準球R1,R2,R3的位置。具體測量流程圖如圖4所示。
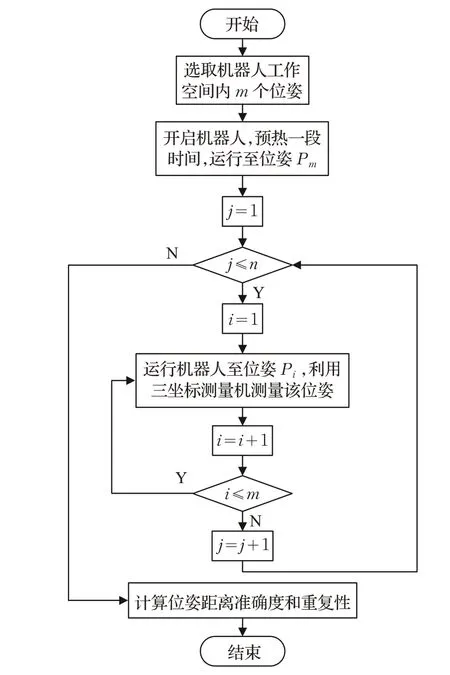
圖4 位姿測量流程圖
測量結束后,三坐標測量機下機器人的實到位姿構成了m 個集群,每個集群包含n 個位姿。假設機器人在一次運動中的起始指令位姿分別為Pc1,Pc2,實際到達位姿為P1j,P2j(表示n 次循環中的第j 次位姿,其中1 ≤j ≤n),如圖5所示。
距離準確度是指令距離和實到距離平均值之間位置和姿態的偏差,位置距離準確度ADl的計算方法如下:
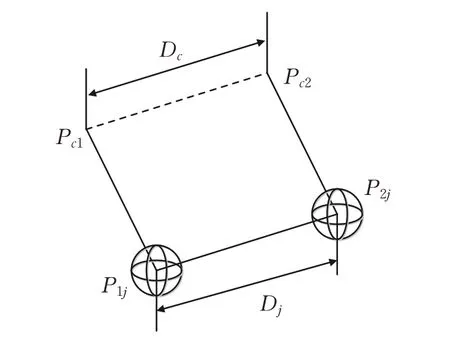
圖5 位姿距離準確度

Dc表示指令距離,表示n次實際距離的平均值。同理,可以求得位置距離準確度在坐標系各軸上的分量ADx,ADy,ADz以及姿態距離準確度ADOz,ADOy,ADOx。
距離重復性是在同一方向上對相同指令距離重復運動n 次后實到距離的一致程度,包括位置距離重復性和姿態距離重復性。位置距離重復性RDl計算方法如下:

同理,可以求得位置距離重復性在坐標系各軸上的分量RDx,RDy,RDz以及姿態距離重復性RDOz,RDOy,RDOx。
4 位姿精度檢測及在前交叉韌帶重建手術中的應用
4.1 位姿距離精度檢測
本文利用自主研發的用于骨科手術輔助定位的6自由度手術機器人iSA(intelligent Surgical Assist),在GLOBAL Silver advantage型三坐標測量機下搭建了相關檢測平臺(圖6)。
圖6(a)為利用三坐標測量機檢測機器人位姿距離精度的檢測場景,其中機器人末端固定5.0 kg 負載(機器人設計負載)以滿足國標規定的機器人位姿精度檢測要求。圖6(b)為設計的用于姿態檢測的機器人末端定位架,采用對稱設計并帶有減重孔以減小不同姿態下重力對機器人末端的影響。3 個標準球球心R1,R2,R3的關系為:R1R2=R1R3=150 mm,R1R2⊥R1R3。機器人末端坐標系RE與法蘭坐標系FL的原點重合,機器人末端坐標系x 軸⊥R2R3,可以得到RE和FL的關系:
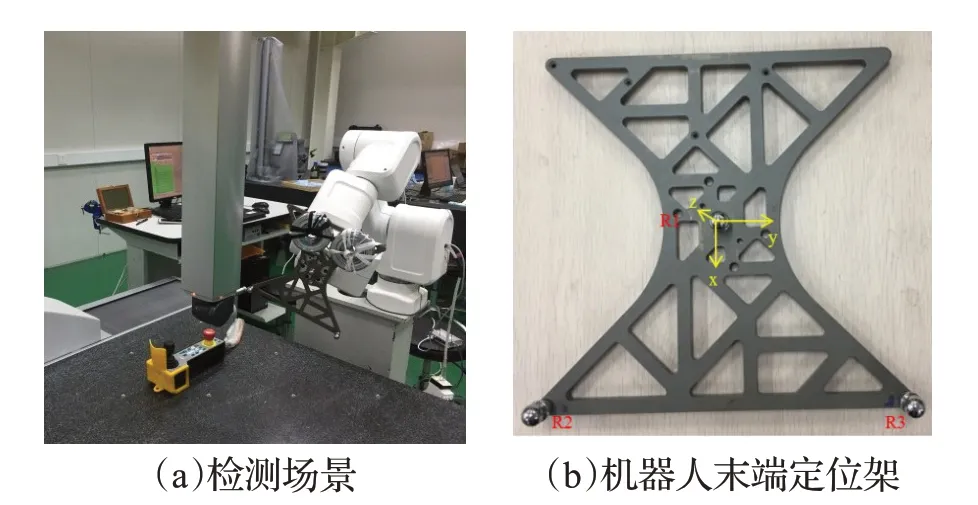
圖6 三坐標測量機檢測平臺
按照國標規定的方法,選取機器人工作空間內5個位姿進行檢測。檢測時,按照P1→P2→…→P5的順序循環30次。最后共得到150組位姿數據,按照前述計算方法計算機器人位姿距離準確度和重復性,結果如表1和表2所示。從計算結果可以看出機器人的位置距離準確度小于0.5 mm,姿態距離準確度小于0.2°,位置和姿態距離重復性分別在10-2mm 和10-2度級別,這樣的精度能夠滿足手術場合需求。
4.2 在前交叉韌帶重建手術中的應用
為了驗證iSA在實際手術中的應用效果,本文利用人體干骨進行前交叉韌帶重建手術模擬實驗(實驗平臺如圖7所示)。具體實驗過程如下:
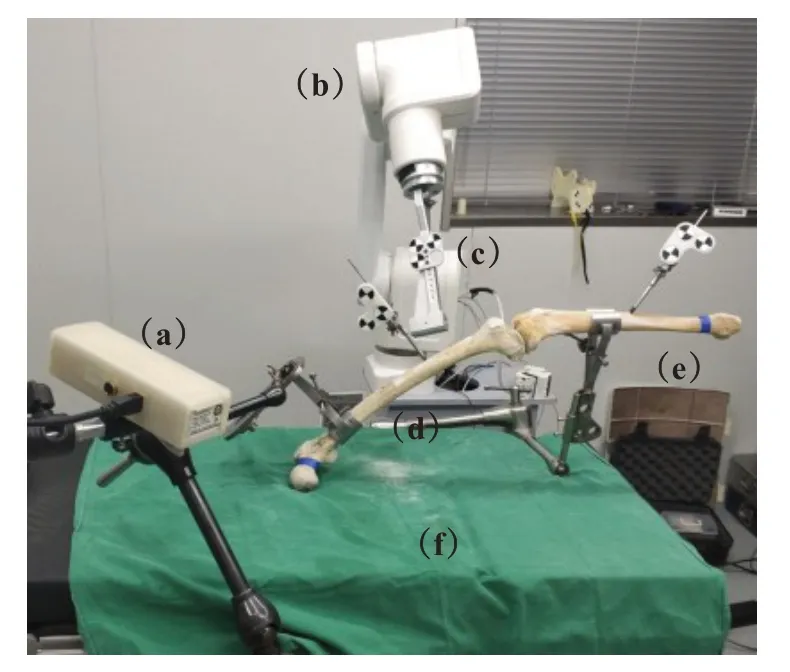
圖7 前交叉韌帶重建手術平臺((a)雙目;(b)手術機器人;(c)手術定位裝置;(d)股骨;(e)脛骨;(f)手術床)

表1 位姿距離準確度

表2 位姿距離重復性
(1)如圖8(a)所示,利用CT掃描股骨和脛骨得到骨頭側位圖像(圖8(b)),完成骨頭模型與雙目坐標系之間的配準工作。
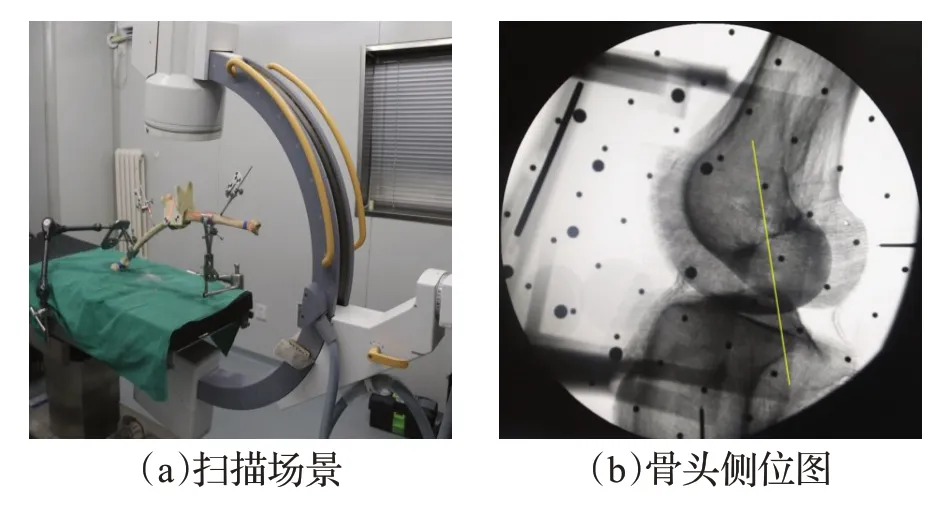
圖8 CT掃描
(2)利用“46%”準則和四分格準則[17]在骨頭側位圖上分別規劃出脛骨和股骨的打孔位姿,如圖8(b)中黃顏色線所示。
(3)將機器人末端手術定位裝置運動至股骨打孔位置附近,雙目系統通過檢測安裝在機器人以及骨頭上的標志物,從而計算出機器人實際位姿與規劃位姿的偏差,然后導航系統根據該偏差將手術定位裝置準確地定位到打孔位姿(圖9(a))。
(4)與上述股骨定位操作相同,完成脛骨定位(圖9(b))。
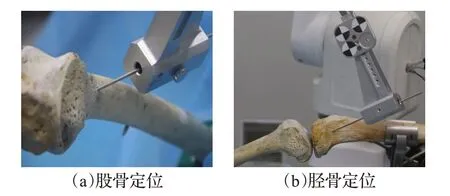
圖9 骨頭定位結果
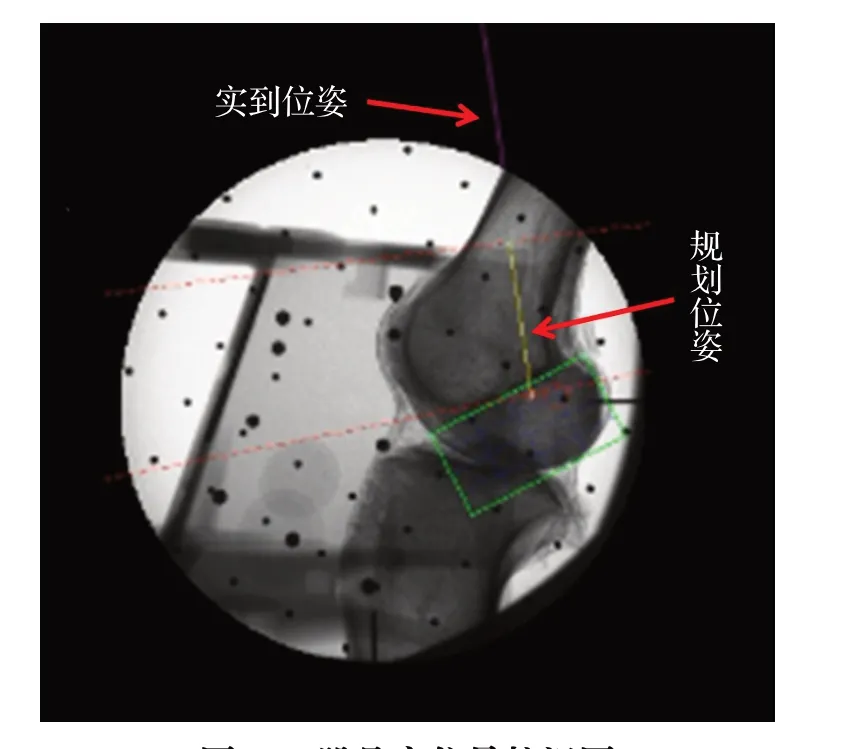
圖10 股骨定位導航視圖
圖10和圖11分別為股骨和脛骨定位在導航系統中的視圖。鑒于圖上很難顯示出機器人實到位姿和規劃位姿之間的細小誤差,這里根據文獻[18]中的方法,利用雙目系統測量的機器人打孔位姿計算定位精度,如表3 所示。該結果滿足統計學中的“拉伊達準則[19]”,即手術定位精度在三坐標測量機測量的位姿距離準確度±重復性的范圍內,所以本文提出的方法對于導航定位類手術機器人是有效的,同時實驗結果表明該機器人可以滿足前交叉韌帶重建手術的定位要求。
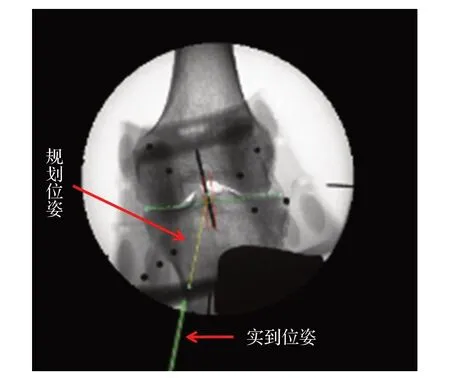
圖11 脛骨定位導航視圖
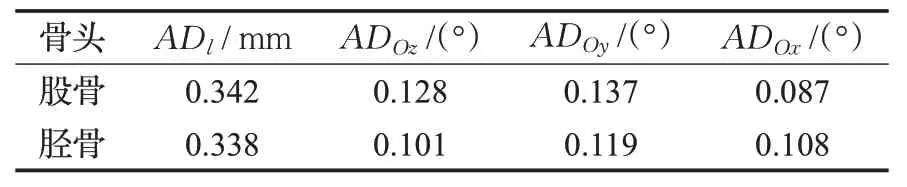
表3 前交叉韌帶重建手術定位精度
5 結束語
本文針對基于影像導航引導定位的手術機器人應用場合,提出了一種基于三坐標測量機的機器人位姿距離精度檢測方法,并闡述其實現過程。在此基礎上,對自主研發的輔助定位手術機器人進行了位姿距離準確度和重復性檢測。結果表明,用該方法檢測的iSA機器人位置距離準確度和重復性分別在10-1mm和10-2mm級別,姿態準確度和重復性在10-1度和10-2度級別。進一步進行了前交叉韌帶重建手術干骨實驗驗證,結果表明通過該方法測量的機器人位姿定位精度可以滿足相關手術要求。
需要說明的是,本方法在全局范圍內存在一定的限制,理論上來說選取的位姿應該分布于機器人的球形工作空間內。但是從圖6中可以看出,三坐標測量機在一組實驗中只能對機器人的工作空間一側進行測量,所以本文測量的位姿距離精度僅在機器人的一側工作空間有效。由于在醫療手術中,機器人一般只在工作空間的一側進行手術操作,所以對機器人左右兩側分別測量是可行的,其測量結果對于醫療場合是有效的。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
河北畫報(2020年10期)2020-11-26 07:20:50
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
西南軍醫(2014年5期)2014-04-25 07:42:48
