圖書搬運機器人總體結構設計
2020-03-11 03:01:50王植平陳鑫陜鵬徐靜卓馬娜娜
科學與財富 2020年35期
王植平 陳鑫 陜鵬 徐靜卓 馬娜娜


摘 要:圖書館的圖書整理工作非常的繁瑣。一個圖書館往往有大量的書籍需要管理員管理;對于不熟悉圖書館的借書人來說想要在茫茫書海中找到一本自己想要的書是非常困難的。此次設計就是幫助管理人員管理書籍的同時幫助人們更加快速的借書。機器人小車采用AGV磁導軌實現規劃軌跡,利用FRID與Aleph 500軟件聯合應用找到特定書籍,后取走相應書籍給用戶。
關鍵詞:軌跡歸劃;FRID;AGV
0 引言
隨著經濟和文化的快速發展,越來越多的人開始到圖書館借書,用知識武裝自己。現代圖書館大型化、多功能性導致圖書館的管理員工作壓力越來越大。大部分讀者不明白圖書館藏書的一般規律,為了找一本自己喜歡的書往往會花上幾個小時,多數時間都浪費在找書上面。因此,設計一個能夠幫助管理員整理書籍的同時還能夠幫助人們快速借閱書籍的機器人很有必要。
1 機器人的結構
圖書機器人結構分兩大主要部分。
(1)第一部分是小車底盤:
小車部分主要是驅動系統和控制系統。驅動系統主要由舵機以及傳動齒輪組成,舵機主要控制小車的方向,傳動齒輪則負責小車的前進和后退。控制系統有中央處理器,主要計算起點終點的位置進行軌跡規劃和控制整個車的運行,處理紅外探頭所返回的信息,控制小車的姿態來規避障礙。
(2)第二部分是搬運機械臂:
車載書架提供將書架上的書取出以后臨時放置的功能。臨時放置書籍的位置可以一次性的取更多的書,可以節約時間并提高工作效率。機械臂是作為在書架取書的工具,利用FRID技術將具體書籍準確定位以后由伺服電機驅動機械臂到達相應的位置拿取書籍放回到書架上。
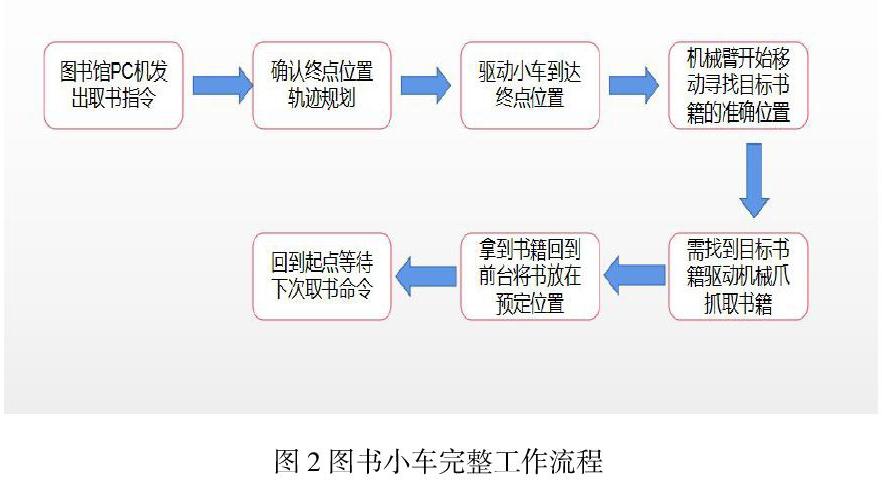
2 圖書搬運機器人的工作流程
圖書館的PC機向小車發出取書的指令后有小車確認終點位置進行軌跡規劃,并驅動小車到達終點位置。移動機械臂尋找目標書籍的準確位置后驅動機械爪抓取書籍并將書籍運送至指定位置。最后回到起點等待下次取書指令。
3 機器人功能實現
3.1硬件功能實現:
(1)機器人的驅動
因為是在圖書機器人是在閱覽室活書庫環境中使用,地面比較平坦,所以機器人采用箱體式設計,運動方式為輪式驅動,采用差速轉向的方式。
機器人驅動電機為24V直流伺服電機,采用PC104主板進行控制,以windows系統作為圖書館計算機和機器人終端的人機交互的方式。
(2)機器人的軌跡規劃
線路導航采用的是磁導軌(AGV)的方式進行導航。使用預埋電磁釘系統實現對機器人的尋路導航機器人通過預埋的磁釘來進行存取書籍(流程如圖3所示)。將每個磁釘進行編號(如圖4所示)機器人上的磁感應系統與地下預埋的磁釘相互感應確定小車的位置并不斷的將信號反饋給電驅動模塊的處理器;處理器基于信號生成相應的控制信號控制電機的運行。運用紅外傳感器用于防止碰撞,實現避障的功能。
利用電磁條為機器人提供路線導航的同時還可以利用電磁感應為機器人提供能源支持,通過電磁條為機器人提供能源支持就能夠解決機器人需要重復充電的需求同時由于不需要攜帶電源設備因此可以大幅度的減輕機器人的自重。
3.2機器人實現存取書籍方面
機器人采用5自由度的機械手實現書籍的拿取功能,5自由度的機械臂能夠完全滿足抓取書籍的功能。機械手采用連桿機構通過齒輪實現開閉功能,運用伺服電機控制齒輪的旋轉來控制機械手的開合角度,如圖5所示。
3.3軟件功能實現:
(1)對整個圖書館采用以圖書館集成系統Aleph 500。
Aleph 500是一個基于智能化設計的產品,采用分布式的邏輯結構和多層客戶機/服務器體系結構以及成熟開放的關系數據庫(ORACLE)。
Aleph 500軟件的優點眾多:靈活性的模塊化組件,可以根據需要裁減,以適合用戶的需求;友好的用戶工作流和簡潔直觀的圖形界面提高了館員和用戶的效率;組件可以修改和定制,任何規模的圖書館及其聯合組織都可以建立自己獨一無二的管理系統;依據OpenURL、XML、OAI、NCIP、ODBC等工業標準,Ex Libris產品提供最終的資源共享能力、完全的連通性和其他系統和數據庫的無縫協調工作能力;固有的多層客戶機/服務器結構,確保Aleph 500滿足用戶今天和未來的需求。多語種對UNICODE完全支持,提供了多方向和多腳本文本能力。可以提供20余種的用戶接口。
(2)圖書館機器人采用多處理器協調模式。
對機器人不同的功能用不同的處理器進行處理,同時鏈接到同一個單片機芯片上,通過中間芯片發出對各個不同系統的指令最終實現對圖書的存取工作,以及對路線的規劃。不同的芯片處理不同問題然后再將結果進行匯總進行集中處理可以降低對程序的編程要求。
(3)機器人對圖書的識別方式。
書籍識別方面采用RFID技術進行對書籍的識別。
RFID技術即頻識別,RFID(Radio Frequency Identification)技術,又稱無線射頻識別,是一種通信技術,俗稱電子標簽。
RFID技術在圖書館掃描方面相比紅外線掃描條形碼有巨大的優勢,RFID技術是不需要通過條形碼進行掃描因此能夠降低對圖書漏掃錯掃的幾率,對圖書的識別更加的簡單。而且RFID技術的遠距離識別可以使機器人初始對書架的定位等更加的方便。對書架的定位可以在需要同時取走多本書的時候進行整體的軌跡規劃能夠節約時間成本和機器人的運行成本。
4 功能拓展
在此基礎上可以通過物聯網技術開發小程序功能,支持對相應圖書的預約。通過小程序對圖書進行預約后圖書機器人會提前將所需要的圖書檢索獲取,把目標圖書從書架送至前臺。借書人只需要在前臺登記信息后就可以把書籍帶走。這樣預約式的借書不僅可以節約借書者找書的時間還可以有效的減少人們在圖書館逗留的時間;間接的提高圖書館的容納量。而且遇到一類書不夠的情況時,預約借書還能夠幫助人們提前一步借到自己想要的書。
5 結論
圖書機器人是一種可以幫助借書人快速的在書海中找到自己所需要的一本書的機器人。盡管這個設計雛形在很早以前就已經實現,但都只是出于實驗階段,因為各種原因都沒有在公共圖書館大量使用。這個機器人以單片機為主要控制系統,人機交互為Windows系統使我們更加的熟悉,學習起來也更快捷,同時利用PC機對機器人的控制更加的直觀,在后面的發展中想要拓展更多的功能時也方便很多。機器人可以幫助管理員管理圖書,將顧客歸還的圖書按照相應的次序擺放在書架上;當圖書館收藏新的書籍可以幫助管理員快速的歸類。
但是這個機器人目前只能單一的幫助圖書管理員將圖書按照已有的次序有序的將書籍擺放在書架上。面對游客看完后隨意放置在書架的書籍無法做到將他重新放回到正確的位置。這是一個急需改進的地方。相信這些問題在試驗性應用后是能夠快速得到解決的。
參考文獻:
[1]蔣羽鑫.圖書管理助手機器人導航避障技術研究[J].吉林化工學院圖書館,2017,第35期。
[2]趙晉芳,張海華,郭太君.一種圖書搬運機器人的設計[J].沈陽工學院機械與運載學院,2016,第4期。
[3]夏正偉,李全,端文慧,傅平.RFID圖書自動盤點機器人應用研究——以武漢大學圖書館為例[J]武漢大學信息管理學院,武漢大學圖書館,2020,第1期。
[4]樊慧麗,邵波.智能機器人圖書盤點創新實踐與思考——一南京大學圖書館為例[J].南京大學信息管理學院,2018,第9期。
作者簡介:
王植平(1998-),男,湖北恩施人,本科,武漢商學院機器人工程專業;主要研究方向:工業機器人系統集成。
陜鵬(1999-),男,湖北公安人,本科,武漢商學院機器人工程專業;主要研究方向:工業機器人系統集成。
徐靜卓(1998-),男,湖北咸寧人,本科,武漢商學院機器人工程專業;主要研究方向:工業機器人系統集成。
馬娜娜(2000-),湖北天門人,本科,武漢商學院機器人工程專業;主要興趣和研究方向有機器人的集成設計,智能機器人編程,機器人教育。
通訊作者:
陳鑫(1988-),男,湖北武漢人,碩士,武漢商學院教師,工程師;主要研究方向:工業機器人系統仿真,視覺識別。
[基金項目] :大學生創新創業項目,項目號:202011654094, 名稱:DIY機器人定制平臺。
(武漢商學院機電工程學院 ?湖北 ?武漢 ?430056)
