純電動汽車速比DOE與多目標優(yōu)化研究
2020-03-13 20:58:00王聰聰張洪信趙清海賈騰飛侯典平
青島大學學報(工程技術(shù)版) 2020年1期
王聰聰 張洪信 趙清海 賈騰飛 侯典平
摘要:??針對純電動汽車的驅(qū)動電機特有的轉(zhuǎn)速轉(zhuǎn)矩特性,使電動汽車變速箱不需要太多擋位的問題,本文在某款電動汽車基礎上,對傳動比進行初步匹配,運用實驗設計(design?of?experiments,DOE)對傳動比進行分析,并對傳動比進行多目標優(yōu)化。優(yōu)化結(jié)果表明,優(yōu)化后的電機轉(zhuǎn)矩較優(yōu)化前減小,傳動比的改變可以使電機的轉(zhuǎn)矩趨于更加合理的區(qū)間,避免了大轉(zhuǎn)矩低需求的能耗浪費現(xiàn)象,優(yōu)化后,最高車速提升了5.6?km/h,在0~100?km/h時,加速時間增加了3.7?s,最大爬坡度減少了7.7%,但是百公里油耗減少了2.4?kWh,說明最高車速比優(yōu)化前略有提高,百公里能量消耗比優(yōu)化前略有減少,該結(jié)果滿足預期設置的動力性指標,且提高了經(jīng)濟性能。該研究具有廣闊的應用前景。
關(guān)鍵詞:??純電動汽車;?傳動比匹配;?DOE分析;?多目標優(yōu)化
中圖分類號:?U469.72;?TM921.41?文獻標識碼:?A
收稿日期:?2019-06-20;?修回日期:?2019-11-27
基金項目:??山東省自主創(chuàng)新及成果轉(zhuǎn)化專項(40215020073);山東省科技發(fā)展計劃項目(2014GGX103044);青島市戰(zhàn)略性新興產(chǎn)業(yè)培育計劃項目(14-8-1-2-gx)
作者簡介:??王聰聰(1995-),女,碩士研究生,主要研究方向為電液混合動力汽車動力系統(tǒng)匹配及控制策略。
通信作者:??趙清海(1985-),男,山東人,講師,博士,主要研究方向為新型動力集成及儲能系統(tǒng)設計。Email:?zqhbit@163.com
由于石油資源短缺、環(huán)境污染等問題日益凸顯,電動汽車作為機械和電氣耦合的復雜機電系統(tǒng)[1],在節(jié)能環(huán)保方面具有傳統(tǒng)汽車無法比擬的優(yōu)勢[2],但是續(xù)航里程短和充電時間長制約了電動汽車的發(fā)展。因此,要解決電動汽車的瓶頸問題,對傳動比進行合理的參數(shù)匹配顯得至關(guān)重要[3]。理想的驅(qū)動場可以在沒有變速箱的情況下進行車輛驅(qū)動,所以若運用到電動汽車上,在不使用變速器的情況下,可以利用電機的驅(qū)動特性來驅(qū)動汽車[4],如果增加變速器,會根據(jù)行駛情況改變傳動比,不同的傳動比可以增大電機最大功率和最大效率區(qū)間,這樣更容易達到各項指標要求。近年來,采用較為先進的遺傳算法對設計變量進行多目標優(yōu)化成為一種趨勢。詹樟松等人[5]對汽車動力傳動系統(tǒng)優(yōu)化設計和匹配進行研究;岳驚濤等人[6]對汽車傳動系統(tǒng)的合理匹配進行評價。基于此,本文以某款電動汽車為例,利用Isight集成Cruise軟件,并采用遺傳算法對傳動系參數(shù)進行多目標優(yōu)化。該研究滿足設計要求,且可以用該算法解決類似多目標優(yōu)化問題。該研究對節(jié)能環(huán)保具有重要意義。
1?純電動汽車動力傳動系統(tǒng)
1.1?動力傳動系統(tǒng)基本結(jié)構(gòu)
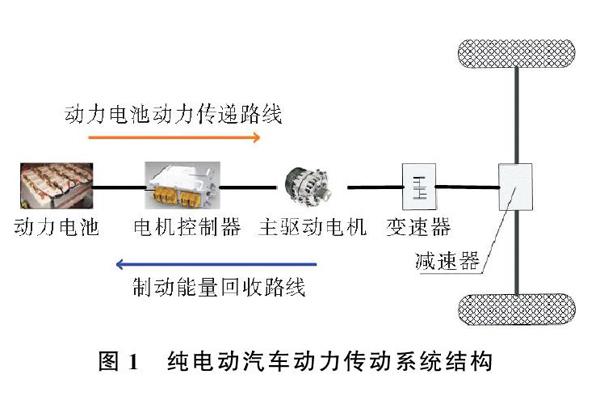
純電動汽車動力傳動系統(tǒng)結(jié)構(gòu)圖如圖1所示。其中,動力傳動系統(tǒng)包括動力電池組、電機控制器,主驅(qū)動電機,變速器和減速器等。
1.2?純電動汽車各項指標要求
純電動汽車的各項指標要求如表1所示。
2?傳動比參數(shù)匹配
當動力電池和電機確定后,變速器傳動比的選擇應首先滿足汽車動力性要求,同時還要滿足地面附著條件[7]。
1)?電機的最高轉(zhuǎn)速通常會比汽車最高穩(wěn)定車速所對應的轉(zhuǎn)速高,根據(jù)這個關(guān)系確定傳動系統(tǒng)在二檔時的傳動比上限為
i0i2≤0.377nmaxrumax(1)
式中,i0為主減速器的傳動比;i2為汽車二檔傳動比;nmax為電機最高轉(zhuǎn)速;μmax為汽車的最高穩(wěn)定轉(zhuǎn)速;r為汽車車輪半徑。
x
2)?電機在額定工況下的最大輸出扭矩通常出現(xiàn)在汽車起步階段,最高穩(wěn)定車速所對應的行駛阻力產(chǎn)生的阻力矩通常會小于最大輸出扭矩,根據(jù)這個關(guān)系確定傳動系統(tǒng)在二檔時的傳動比下限為
i0i2≥FμmaxrηTTμmax(2)
式中,Tμmax為電機在額定工況下的最大輸出扭矩;Fμmax為最高穩(wěn)定車速所對應的行駛阻力;ηT為傳動效率。
3)?最大驅(qū)動力通常在一檔時產(chǎn)生,最大驅(qū)動力應小于或等于地面對車輛輪胎的附著力,根據(jù)這個關(guān)系確定一檔傳動比的上限[8]為
i0i1≤FzφrTmaxηT(3)
式中,F(xiàn)z為地面對驅(qū)動輪的法向反作用力;ψ為附著系數(shù);Tmax為電機的最大輸出轉(zhuǎn)矩。
4)?電機的最大輸出轉(zhuǎn)矩應該大于和最大爬坡角對應的行駛阻力產(chǎn)生的阻力矩,否則不能滿足爬坡度動力需求,可根據(jù)此關(guān)系確定一檔時傳動比的下限[9-10]為
i0i1≥FαmaxrηTTmax(4)
式中,F(xiàn)αmax為最大爬坡角對應的行駛阻力;Tmax為電機最大輸出轉(zhuǎn)矩。
5)?傳統(tǒng)汽車因為離合器的存在,響應速度慢,通常還需要考慮換檔期間平順問題,因此會將兩檔傳動比的比值設置在1.8左右,由于電動汽車沒有離合器,電機可以直接參與換檔,電機快速響應可以對兩檔間傳動比的比值進行特定設置[11],但是考慮到主減速器在安裝過程中防止與其它零件發(fā)生干擾,需要設置主減速器的傳動比,傳動比的上限為[12]
i0-5.8≤0(5)
3?傳動比DOE與多目標分析
3.1?純電動汽車建模
AVLCruise軟件用于車輛動力性和燃油經(jīng)濟性的仿真,其模塊化的建模可以使設計者根據(jù)不同要求搭建不同布置結(jié)構(gòu)的車輛模型,駕駛員模塊的加入可以較好地模擬真實行駛路況,比其它后向仿真軟件更貼近實際,復雜精確的求解器可以保障計算速度和結(jié)果的準確性[13]。在Cruise中建立純電動汽車模型,純電動汽車整車仿真模型如圖2所示。
循環(huán)工況選用新標歐洲循環(huán)測試(new?european?driving?cycle,NEDC)工況,NEDC工況包括市區(qū)工況和市郊工況,市區(qū)工況由4個小的市區(qū)運轉(zhuǎn)循環(huán)單元組成,每個循環(huán)時間為195?s,包括怠速、啟動、加速以及減速等幾個階段,最高車速為50?km/h,平均車速為18.35?km/h,最大加速度為1.042?m/s2,平均加速度為0.599?m/s2;市郊運轉(zhuǎn)循環(huán)時間為400?s,最高車速為120?km/h,平均車速為62?km/h,最大加速度為0.833?m/s2,平均加速度為0.354?m/s2,NEDC循環(huán)工況如圖3所示。
3.2?傳動比DOE
為找出對整車能量消耗影響較大的參數(shù),對整車模型參數(shù)進行實驗設計(design?of?experiments,DOE)分析。整車模型導出參數(shù)如表2所示。
DOE是isight軟件中一個模塊,不需要手工制作表格和處理數(shù)據(jù),適用于產(chǎn)品開發(fā)和過程優(yōu)化,可以使關(guān)鍵的產(chǎn)品特性達到最大或最優(yōu),通過科學合理的安排實驗,識別產(chǎn)品系統(tǒng)中最為關(guān)鍵的因素,或影響大小及因素間可能存在的交互作用,其結(jié)果可以提高產(chǎn)品開發(fā)的質(zhì)量水平和過程優(yōu)化水平。
當純電動汽車動力系統(tǒng)其它部件確定后,傳動比的大小影響汽車的經(jīng)濟性和動力性,一組合適的速比對電動汽車至關(guān)重要。通過式(1)~式(5),可以得出一檔速比、二檔速比和主減速器速比的上、下限,利用isight軟件集成Cruise可以對傳動比進行實驗設計,采用拉丁超立方法設計樣本點,設置完后進行分析,得傳動比DOE分析結(jié)果,經(jīng)濟性影響因素如圖4所示,動力性影響因素如圖5所示。圖中,藍色條形表示該項對應的影響是積極的,而紅色條形表示該項對應的影響是消極的。
由圖4可以看出,一檔傳動比和主減速器傳動比為主要影響因素,其它因素對百公里電耗影響不大;由圖5可以看出,主要影響因素為主減速器速比和它的平方,即減速器速比是影響動力性的主要因素,其它因素對動力性影響較小。
3.3?純電動汽車傳動比多目標優(yōu)化
3.3.1?建立目標函數(shù)
多目標函數(shù)通常表示多個目標集合在一起的函數(shù),通常是這幾個目標函數(shù)存在一定的聯(lián)系,它們各自的優(yōu)化目標不統(tǒng)一,比如生產(chǎn)商品,既要使產(chǎn)量高,又要使產(chǎn)品質(zhì)量高、成本低。通常情況下,產(chǎn)品質(zhì)量高對應的是成本高,這里的目標函數(shù)是質(zhì)量高且成本低,要同時實現(xiàn)這兩個目標很難,因此會選擇一個折中解,使兩個目標函數(shù)相對最優(yōu)來滿足整體最優(yōu)。
本文研究純電動汽車百公里加速時間和電能消耗問題,也是個多目標函數(shù)問題,通常希望用最少的能量消耗來實現(xiàn)車輛動力性能最好,其多目標函數(shù)為
minFX=[FecX,F(xiàn)t(X)](6)
式中,X為優(yōu)化設計變量,X=[i0,i1,i2]T;F(X)為描述設計目標的多目標函數(shù);Fec(X)為電能消耗的單目標函數(shù);Ft(X)為百公里加速時間的單目標函數(shù)。
3.3.2?設置約束條件
多目標函數(shù)需要設置約束條件,如果沒有約束條件,得出的優(yōu)化結(jié)果片面性較大,車輛動力性有三大評價指標,其中一個指標作為單目標函數(shù),剩下的兩個指標可以作為約束條件,因此,將滿足設計指標要求的最大爬坡度和最高車速設為約束條件。最大爬坡度約束為
Fi(i0,i1,i2)≥25%(7)
最高車速約束為
Fv(i0,i1,i2)≥130(8)
3.3.3?基于Isight的傳動比優(yōu)化
利用Isight集成Cruise軟件,對目標函數(shù)進行多目標優(yōu)化,采用多島遺傳算法,這是借助生物進化中“適者生存”的規(guī)律,模仿生物進化中的遺傳繁殖機制,是目前解決多目標優(yōu)化問題常用的方法[14-15],優(yōu)化過程中各變量迭代過程如圖6所示,共有20個島,20代繁殖,4?000次迭代。
4?純電動汽車前后仿真分析
優(yōu)化前后驅(qū)動電機轉(zhuǎn)矩變化曲線如圖7所示。由圖7可以看出,優(yōu)化后的驅(qū)動電機轉(zhuǎn)矩相對優(yōu)化之前相對降低了一些,不過也處于合理區(qū)間之內(nèi),這樣既可以減少能量的浪費,又可以滿足工況的需要;優(yōu)化前后能量消耗變化曲線如圖8所示。
由圖8可以看出,優(yōu)化后的能量消耗與優(yōu)化前相比較略有下降,根據(jù)DOE分析結(jié)果可以得出,優(yōu)化后一檔的傳動比較優(yōu)化前的傳動比減小,主減速器傳動比也減小,這兩項是DOE分析中對能量消耗影響最大的兩個因素[16]。
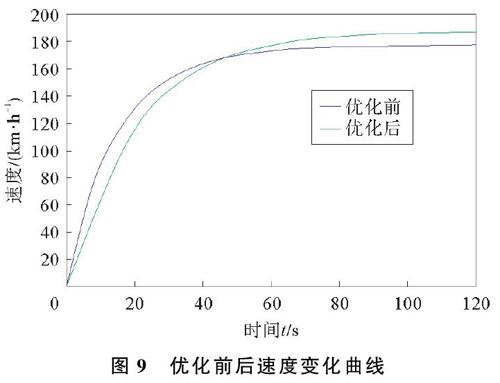
優(yōu)化前后速度變化曲線如圖9所示。由圖9可以看出,優(yōu)化后的加速度較優(yōu)化前減小,根據(jù)DOE分析結(jié)果,影響汽車加速性能的主要因素為主減速器速比,優(yōu)化后的速比較優(yōu)化前略有減小,因此加速性能有所下降,這與圖7所示驅(qū)動電機轉(zhuǎn)矩減小基本吻合[17-18],雖然加速性能減小,但是最高車速較優(yōu)化前略有增加。
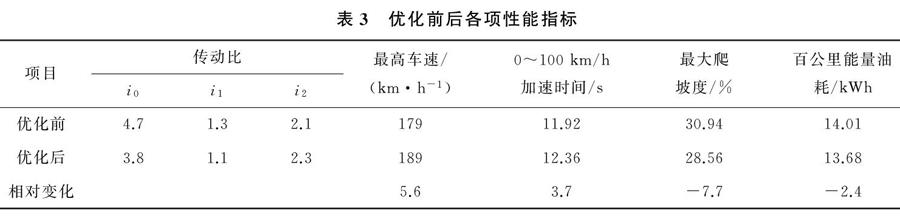
將純電動汽車優(yōu)化前后各項性能指標進行對比,優(yōu)化前后各項性能指標如表3所示。
由表3可以看出,最高車速提升了5.6?km/h,在0~100?km/h時,加速時間增加了3.7?s,最大爬坡度減少了7.7%,但是百公里油耗減少了2.4?kWh。
5?結(jié)束語
本文主要對純電動汽車速比DOE與多目標優(yōu)化問題進行研究。優(yōu)化后,電機轉(zhuǎn)矩較優(yōu)化前減小,但并不影響NEDC工況的轉(zhuǎn)矩需求,可見傳動比的改變可以使電機的轉(zhuǎn)矩趨于更加合理的區(qū)間,避免了大轉(zhuǎn)矩低需求的能耗浪費現(xiàn)象;優(yōu)化后,百公里加速時間和最大爬坡度略有下降,但最高車速比優(yōu)化前略有提高,百公里能量消耗比優(yōu)化前略有減少,這說明多目標優(yōu)化并不能使動力性和經(jīng)濟性同時都得到改善,通常是在眾多pareto最優(yōu)解中選取一組綜合性能最好的解,此次選取的使動力性能指標和經(jīng)濟性指標變化都在允許范圍之內(nèi),不影響車輛NEDC工況的要求,所以選取合理。對傳動比DOE分析結(jié)果與仿真結(jié)果基本相符,說明用Isight集成Cruise的方法可行,在進行變量優(yōu)化之前可以用DOE方法對優(yōu)化結(jié)果做個簡單估計,同時可以驗證優(yōu)化結(jié)果;采用遺傳算法對傳動系參數(shù)進行多目標優(yōu)化,結(jié)果顯示該算法滿足設計要求,可以用該算法解決類似多目標優(yōu)化問題。
參考文獻:
[1]?陳清泉,?詹宜君.?21世紀的綠色交通工具-電動汽車[M].?北京:?清華大學出版社,?2001.
[2]?郭孔輝,?姜輝,?張建偉.?電動汽車傳動系統(tǒng)的匹配及優(yōu)化[J].?科學技術(shù)與工程,?2010,?10(16):?3892-3896.
[3]?薛念文,?高非,?徐興,?等.?電動汽車動力傳動系統(tǒng)參數(shù)的匹配設計[J].?重慶交通大學學報:?自然科學版,?2011,?30(2):?303-307.
[4]?Mantled?M,?Henning?W.?汽車動力學[M].?陳萌三,?余強譯.?北京:?清華大學出版社,?2009.
[5]?詹樟松,?楊正軍,?劉興春.?汽車動力傳動系統(tǒng)優(yōu)化設計和匹配研究[J].?汽車技術(shù),?2007(3):?17-20.
[6]?岳驚濤,?廖苓平,?彭莫.?汽車傳動系統(tǒng)的合理匹配評價[J].?汽車工程,?2004(1):?102-106.
[7]?何洪文.?混合動力車輛驅(qū)動系研究和控制策略分析[D].?北京:?北京理工大學,?2003.
[8]?Bradley?G,?Gregory?W,?Giorgio?R.?Operation?and?control?strategries?for?hybrid?electric?automobiles[C]∥Future?Car?Congress.?Warrendale,?USA:?SAE,?2000.
[9]?朱正禮,?殷承良,?張建武.?基于遺傳算法的純電動轎車動力總成參數(shù)優(yōu)化[J].?上海交通大學學報,?2004,?38(11):?1907-1912.
[10]?文孝霞,?杜子學.?遺傳算法在汽車動力性、經(jīng)濟型優(yōu)化中的應用[J].?汽車研究與開發(fā),?2002(4):?42-43,?49.
[11]?王立國.?純電動客車動力總成控制策略研究[D].?吉林:?吉林大學,?2009.
[12]?廖承林,?張俊智,?盧青青.?混合動力轎車機械式自動變速器換檔過程中的動力系統(tǒng)協(xié)調(diào)控制方法[J].?機械工程學報,?2005,?41(12):?37-41.
[13]?王少凱.?基于Cruise軟件的純電動城市客車的建模與仿真[J].?客車技術(shù)與研究,?2011,?33(2):?10-12.
[14]?雷英杰,?張善文,?李續(xù)武,?等.?MATLAB遺傳算法工具箱及應用[M].?西安:?西安電子科技大學出版社,?2005:?62-121.
[15]?秦大同,?周保華,?胡明輝,?等.?兩檔電動汽車動力傳動系統(tǒng)的參數(shù)設計[J].?重慶大學學報,?2011,?34(1):?1-6.
[16]?鄒鋒.?教學優(yōu)化算法若干改進及其應用研究[D].?西安:?西安理工大學,?2014.
[17]?耿建光,?李隆春,?鄧家禔.?設計優(yōu)化與過程自動化協(xié)同優(yōu)化平臺[J].?航空制造技術(shù),?2004(9):?49-53.
[18]?馬靜敏.?基于iSIGHT的電子汽車衡的多學科設計優(yōu)化[D].?青島:?山東科技大學,?2005.
DOE?Analysis?and?MultiObjective?Optimization?of?Pure?Electric?Vehicle
WANG?Congconga,?ZHANG?Hongxina,?ZHAO?Qinghaib,?JIA?Tengfeia,?HOU?Dianpinga
(a.?School?of?Electromechanic?Engineering;?b.?Power?Integration?and?Energy?Storage?Systems?Engineering?Technology?Center,?Qingdao?University,?Qingdao?266071,?China)
Abstract:??Due?to?the?unique?speed?and?torque?characteristics?of?pure?electric?vehicle?drive?motors,?electric?vehicle?gearboxes?do?not?require?too?many?gears.?This?article?is?based?on?a?certain?type?of?electric?vehicle?that?matches?the?transmission?ratio,?and?performs?multiobjective?optimization?design?of?the?transmission?ratio?through?experimental?design(design?of?experiments,?DOE).?The?optimization?results?show?that?the?torque?of?the?motor?after?optimization?is?smaller?than?that?before?optimization.?The?change?of?the?transmission?ratio?can?make?the?torque?of?the?motor?tend?to?a?more?reasonable?interval,?and?avoid?energy?waste?with?high?torque?and?low?demand.?The?optimized?maximum?speed??increased?by?5.6?km/h,?the?acceleration?time?increased?by?3.7?s,?and?the?maximum?climbing?capacity?decreased?by?7.7%,?but?the?fuel?consumption?per?100?kilometers?decreased?by?2.4?kWh.?This?indicates?that?the?maximum?speed?ratio?has?increased,?compared?with?that?before?optimization,?and?it?reduces?energy?consumption?by?100?kilometers.?The?above?shows?that?the?results?are?consistent?with?the?expected?dynamic?indicators,?and?economic?performance?is?improved.?This?research?has?broad?application?prospects.
Key?words:??electric?vehicles;?ratio?matching;?doe?analysis;?multiobjective?optimization