后驅式純電動車再生制動控制策略研究
2020-03-13 20:58:00孟澤文張鐵柱張洪信趙清海尹懷仙侯典平
青島大學學報(工程技術版) 2020年1期
孟澤文 張鐵柱 張洪信 趙清海 尹懷仙 侯典平
摘要:??針對電動汽車再生制動力中制動力分配系數不合理的問題,本文以后驅式純電動汽車為研究對象,通過分析制動力安全分配區域,在isight軟件中對制動力分配區域優化,得出最優分配區間,并在此基礎上提出新型再生制動控制策略。同時,在AVL_cruise中建立電動汽車整車模型,在Matlab/Simulink中建立再生制動控制策略模型,并在不同制動強度工況下進行聯合仿真。仿真結果表明,與原控制策略相比,新控制策略在中制動強度制動時的能量回收率明顯提高,在高、大制動強度時電動汽車的制動穩定性提升,說明該控制策略是合理的。該研究為電動汽車對再生制動深入研究能量回收率以及制動穩定性等方面提供了理論基礎。
關鍵詞:??后驅電動汽車;?再生制動;?控制策略;?優化;?仿真
中圖分類號:?U469.72?文獻標識碼:?A
收稿日期:?2019-08-16;?修回日期:?2019-10-28
基金項目:??山東省自主創新及成果轉化專項(40215020073);山東省科技發展計劃項目(2014GGX103044);青島市戰略性新興產業培育計劃項目(14-8-1-2-gx)
作者簡介:??孟澤文(1996-),男,山東泰安人,碩士研究生,主要研究方向為電動汽車智能化動力集成技術。
通信作者:??張洪信(1969-),男,山東濰坊人,博士,教授,主要研究方向為電動汽車智能化動力集成技術。Email:?qduzhx@126.com
隨著汽車工業的迅速發展,隨之帶來了嚴重的環境污染和石油資源枯竭問題[1]。近年來,電汽車發展迅速和應用廣泛,但其續駛里程短、動力性不足的問題仍然沒有得到解決。再生制動能夠回收一部分制動時產生的能量,提高能量的利用率,增加汽車的續駛里程,因此再生制動控制策略對電動汽車的研究具有重要意義[2-4]。付先成等人[5]基于XQ6103客車對再生制動系統進行分析,最終確定整車制動力分配系數在0.4~0.5之間取值比較合理;鄧姣艷[6]以純電動公交車位為依據,選取磷酸鐵鋰電池和超級電容組成的復合電源,采用Simulink進行仿真實驗,實驗結果證明儲能效果比單一電源提高了15%;M.?Panagiotidis等人[7]經過仿真研究發現,在不降低駕駛員感受的前提下,在多個典型工況下,串聯式制動能量回收系統性能比并聯式能量回收好,回收率達到20%以上;Hoon?Y等人[8]提出了四輪混合驅動混合動力的制動力分配控制策略,并結合模糊控制,進一步提出再生控制系統和四輪液壓和ABS控制的方法,實現再生制動的總體控制。目前,再生制動主要存在制動穩定性和制動能量回收不能兼顧的問題[9-11]。基于此,本文以制動力分配的角度為出發點,以后驅式純電動汽車為例,對制動力分配安全區域進行優化,提出了新型再生制動控制策略,在保證汽車穩定性的基礎上回收能量最大化。通過聯合仿真,驗證了該控制策略的有效性和可行性。該研究為電動汽車再生制動控制策略的深入研究提供了理論依據。
1?制動能量回收原理
傳統燃油汽車主要靠制動盤與車輪的摩擦實現汽車的制動減速,制動時汽車的動能轉換為熱能損耗[12]。與傳統燃油汽車相比,電動汽車在制動過程中,車輪通過傳動系統帶動電動機發電,將能量儲存在電池中,同時,電動機發電過程中產生的反拖轉矩通過傳動系統傳遞到車輪,實現汽車的制動[13]。
汽車在制動過程中,縱向平面受滾動阻力Ff、空氣阻力Fw、坡度阻力Fi和地面制動力Fb的共同作用。汽車制動動力學方程為
Ft=Ff+Fb+Fi+Fw(1)
式中,Ft為總需求制動力。
假設制動前車速為V1,制動過程結束后的車速為V2,則在整個制動過程中動能的損失為
(mV12)/2—(mV22)/2=FtS(2)
式中,S為制動距離。
在城市交通工況下,可以忽略坡度阻力Fi和空氣阻力Fw[14],所以式(2)可以簡化為
(mV12)/2—(mV22)/2=(Ff+Fb)S(3)
式中,m為汽車質量;Ff為滾動阻力;Fb為地面制動力。滾動阻力以熱能的形式散發,無法回收。汽車制動力包括再生制動力和傳統機械制動力,機械制動力產生的能量最終轉換為熱能,是無法回收的,只有電機再生制動力消耗的一部分能量轉換為轉矩才可以回收[15],所以如何分配制動力的比例和工作模式是影響能量回收利用率的重要因素。
2?制動力分配控制策略
2.1?制動力分配范圍
對于傳統汽車,根據前后輪制動力的分配情況、路面附著系數等因素,汽車制動時會出現以下3種情況[16]:
1)?前輪先于后輪抱死。這種情況發生時,前輪因抱死而失去轉向能力,沒有充分的利用附著條件。
2)?后輪先于前輪抱死。汽車容易發生側滑等危險工況,比前輪先抱死更危險。
3)?前后車輪同時抱死。相比于前兩種情況,此時前后附著系數相等,充分利用附著系數。
因此,制動力分配是否合理對汽車制動過程中的穩定性影響很大,理想的前、后制動力分配為I曲線,該曲線制動力滿足
Fr=12Ghgb2+4hglGFf-(Gbhg+2Ff)(4)
式中,Ff和Fr分別為前、后輪地面制動力;b為質心與后軸的距離;hg為質心高度;G為作用在整車上的重力;l為軸距。
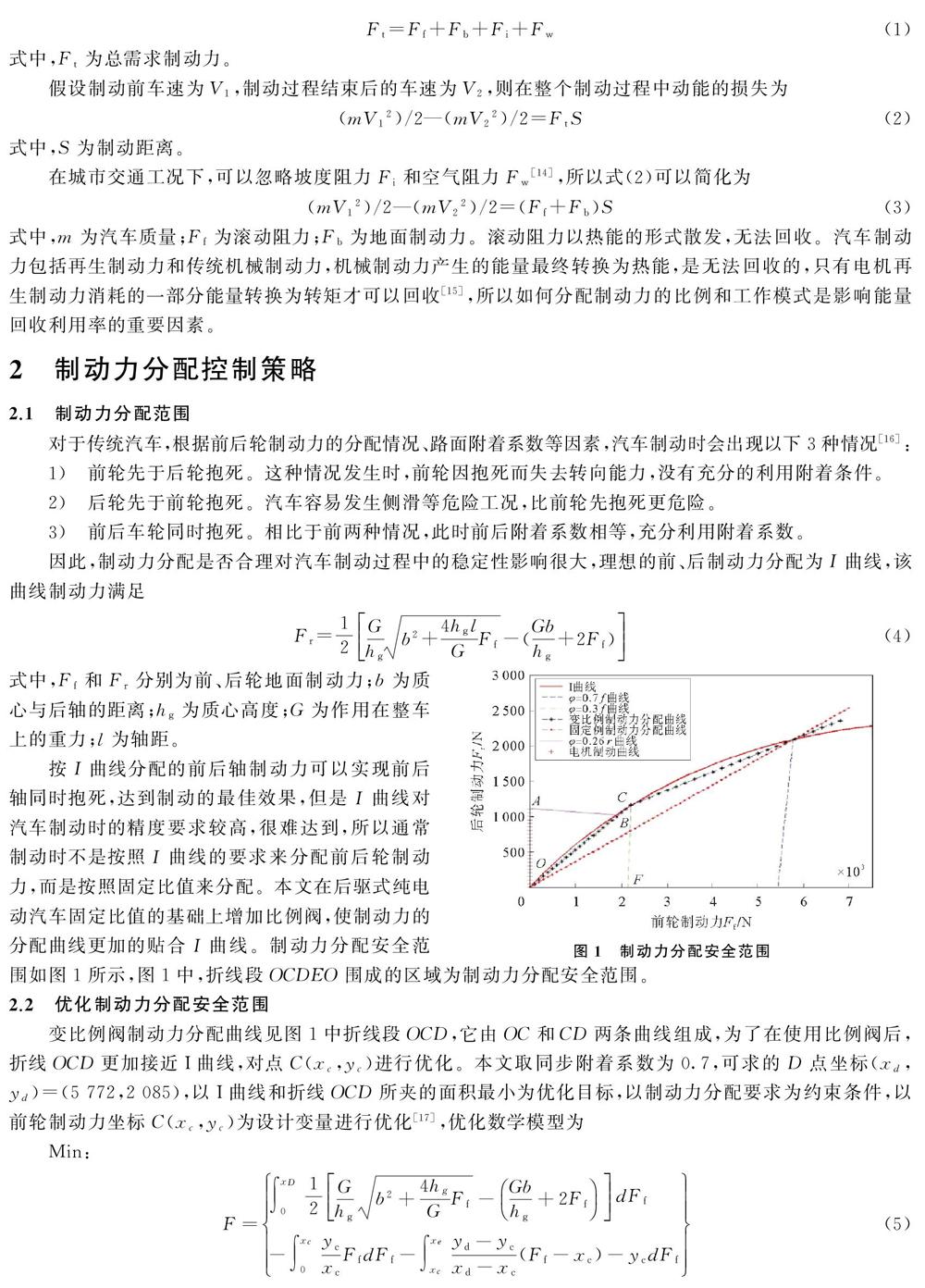
按I曲線分配的前后軸制動力可以實現前后軸同時抱死,達到制動的最佳效果,但是I曲線對汽車制動時的精度要求較高,很難達到,所以通常制動時不是按照I曲線的要求來分配前后輪制動力,而是按照固定比值來分配。本文在后驅式純電動汽車固定比值的基礎上增加比例閥,使制動力的分配曲線更加的貼合I曲線。制動力分配安全范圍如圖1所示,圖1中,折線段OCDEO圍成的區域為制動力分配安全范圍。
2.2?優化制動力分配安全范圍
變比例閥制動力分配曲線見圖1中折線段OCD,它由OC和CD兩條曲線組成,為了在使用比例閥后,折線OCD更加接近I曲線,對點C(xc,yc)進行優化。本文取同步附著系數為0.7,可求的D點坐標(xd,yd)=(5?772,2?085),以I曲線和折線OCD所夾的面積最小為優化目標,以制動力分配要求為約束條件,以前輪制動力坐標C(xc,yc)為設計變量進行優化[17],優化數學模型為
Min:
F=∫xD012Ghgb2+4hgGFf-Gbhg+2FfdFf-∫xc0ycxcFfdFf-∫xexcyd-ycxd-xc(Ff-xc)-ycdFf(5)
S.t.:?yc=Ghgb2+4hgGxc-Gbhg+2xc(6)
0≤xc≤57?720(7)
設計變量優化如圖2所示。
通過優化軟件isight優化,在迭代1?002次之后得到優化后的C點坐標(xc,yc)為(2?305,1?154),即得到直線OC和CD的方程分別為
Fr=0.5Ff(8)
Fr=0.252?1Ff+573(9)
2.3?前后輪制動力分配
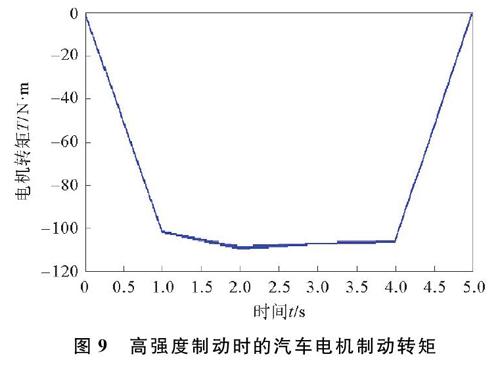
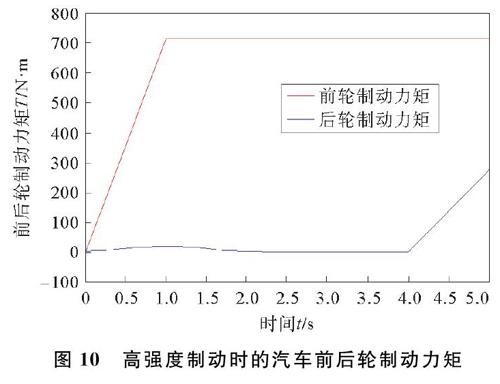
1)?當制動強度0
2)?當制動強度0.1 Freg=-0.047?6Ff+1?111.6(10) 式中,Freg為電機制動力。 3)?當制動強度0.26 Freg=Freg_max(11) F′r=Fr-Freg(12) Fr=0.5Ff(13) 式中,Freg_max為最大的再生制動力;F′r為后輪機械制動力。CD線段的制動力分配方法和BC線段相同,此時 Freg=Freg_max(14) F′r=Fr-Freg(15) Fr=0.252?1Ff+573(16) 4)?當制動強度z>0.7時,為大強度制動,屬于緊急制動狀態,為了保證制動安全性,制動過程中電機退出再生制動,只有機械制動。此時 Freg=0(17) Fr=F′r=0.252?1Ff+573(18) 3?再生制動系統建模 使用Matlab/Simulink軟件搭建車輛再生制動控制模型,汽車制動過程中,電機制動力和機械制動力分配控制策略如圖3所示。 使用AVL_cruise搭建整車模型,本文所采用的目標車型為后驅式純電動汽車,電機輸出軸通過主減速器與后輪相連,電動汽車主要參數如表1所示。 利用AVL_cruiseInterface模塊做為接口,將整車模型中的車速、制動壓力、轉速等信號變量輸入到Matlab/Simulink中,同時輸出電機負荷信號、電機制動力、前輪制動力以及后輪制動力等信號[20],對車輛進行控制,其實際作用相當于實車中的制動控制單元(brake?control?unit,BCU)。用AVL_cruise搭建車輛模型,cruise整車模型如圖4所示。 4?仿真結果分析 以初始車速為100?km/h和80?km/h,并選取幾種不同的制動強度,對本文提出的再生制動控制策略進行實驗驗證。小強度制動時的汽車電機制動轉矩如圖5所示,小強度制動時的汽車前后輪制動力矩如圖6所示。 6?小強度制動時的汽車前后輪制動力矩 由圖5和圖6可以看出,當汽車在小強度制動工況下,只有電機產生制動力矩,前輪和后輪不產生機械制動,說明電機制動足以滿足汽車制動需求。當車速降低到10?km/h時,電機退出再生制動,此時前后輪的機械制動力矩增大,汽車完全由機械制動完成汽車制動。 中強度制動時的汽車電機制動轉矩如圖7所示,中強度制動時的汽車前后輪制動力矩如圖8所示。 由圖7和圖8可以看出,當汽車進行中強度制動時,制動時間為18?s左右,電機的輸出轉矩一直發生變化,當電機制動力不足時,前輪開始機械制動,對電機制動力進行補償,電機的最大輸出轉矩在78?N·m左右并保持穩定,前后輪的制動力矩保持不變。當車速減小到10?km/h時,電機制動力退出再生制動,前后輪的機械制動增大保證制動力矩的穩定性。 高強度制動時的汽車電機制動轉矩如圖9所示,高強度制動時的汽車前后輪制動力矩如圖10所示。 由圖9和圖10可以看出,當汽車進行中強度制動時,制動時間為5?s左右,電機的輸出的轉矩沿其外特性曲線變化,當電機制動力不足時,前輪開始機械制動,對電機制動力進行補償。 電機的最大輸出轉矩在110?N·m左右并保持穩定,前后輪的制動力矩保持不變。當車速減小到10?km/h時,電機制動力退出再生制動,前后輪的機械制動增大保證制動力矩的穩定性。 當汽車處于高強度制動時,電機不參與汽車制動,故提供的制動轉矩為0,汽車所需的制動力矩全部由前后輪的機械制動力矩來提供。選擇制動能量回收率作為評價能量回收效果的指標,即 ηreg=WchgW=Wchg12mV13.62-V23.62(19) 式中,ηreg為電池的能量回收率;Wchg為進入到蓄電池的充電能量;W為汽車制動時消耗的能量;V1為制動前的車速;V2為制動后的車速。 根據式(19),在3種不同工況下,計算電動汽車的制動能量回收率,制動能量回收率如表2所示。 5?結束語 本文主要對后驅式純電動汽車的再生制動控制策略進行研究,提出了一種基于制動強度解耦式串聯再生制動控制策略,并搭建了控制策略模型和整車模型,并對該控制策略進行仿真驗證,仿真結果表明,當電動汽車在中小強度制動時,可以充分利用電機的再生制動,回收效率較高。在高制動強度下制動時,為了保證汽車的制動安全性,電機再生制動明顯減少,能量回收率下降。在大制動強度下,電機完全退出再生制動,以保證汽車制動穩定性。本文的再生制動控制策略方面并沒有考慮到電池的充放電特性對制動力分配的影響以及制動過程的平順性。后續應進一步深入對再生制動控制策略的研究,以提高電動汽車的能量回收率以及制動平順性。 參考文獻: [1]?郭棟,?朱文平,?孫宇航,?等.?城市電動公交車制動能量回收控制策略研究[J].?汽車工程,?2016,?38(3):?269-273. [2]?郭陳棟.?電動車輛再生制動系統控制策略的研究[D].?合肥:?安徽農業大學,?2013. [3]?李欣,?王佳.?節能汽車制動能量回收與再利用[J].?機械設計與制造,?2016(4):?91-93,?97. [4]?劉紅亮,?董學平,?張炳力.?電動汽車再生制動控制策略的研究[J].?合肥工業大學學報:?自然科學版,?2012,?35(11):?1484-1487. [5]?付先成,?張保成,?顏波.?電儲能車輛再生制動系統制動力分配系數設計[J].?機械工程與自動化,?2014(2):?123-125. [6]?鄧姣艷.?電動公交再生制動儲能系統研究[D].?成都:?西南交通大學,?2014. [7]?Panagiotidis?M,?Delagramraatikas?G,?Assanis?D.?Development?and?use?of?a?regenerative?braking?model?for?a?parallel?hybrid?electric?vehicle[C]∥SAE?2000?World?Congress?State?of?Michiga.?USA:?SAE,?2000. [8]?Hoon?Y,?Hyunsoo?K.?Development?of?regenerative?braking?hydraulic?module?and?HIL?simulator?for?hybrid?electric?vehicle[C]∥Proceeding?of?the?23rd?Chinese?Control?Conference.?Shanghai:?East?China?University?of?Science?of?Technology?Press,?2004:?1551-1556. [9]?金宇華,?張庭芳,?劉建春.?混合動力電動汽車制動力分配及能量回收控制策略研究[J].?機械傳動,?2011,?35(12):?34-36,?52. [10]?余志生.?汽車理論[M].?北京:?機械工業出版社,?2009. [11]?賴鋒.?重型汽車制動系統結構分析及其設計方法研究[D].?武漢:?武漢理工大學,?2006. [12]?王耀南,?劉東奇.?電動汽車機電復合制動力分配策略研究[J].?控制工程,?2014,?21(3):?347-351,?356. [13]?劉鵬.?基于iSIGHT平臺的多學科多目標優化設計[D].?西安:?西安理工大學,?2012. [14]?張京明,?王仕偉,?程志剛,?等.?混合動力汽車再生制動系統的建模與仿真[J].?計算機仿真,?2008,?25(7):?268-272. [15]?劉果.?后驅型純電動汽車再生制動系統的研究[D].?太原:?太原理工大學,?2016. [16]?周英超,?李訓明,?曲金玉.?后驅并聯式液壓再生制動汽車制動力分配研究[J].?農業裝備與車輛工程,?2013,?51(2):?9-13. [17]?初亮,?蔡健偉,?富子丞,?等.?純電動汽車制動能量回收評價與試驗方法研究[J].?華中科技大學學報:?自然科學版,?2014,?42(1):?18-22. [18]?陳斌.?純電動汽車再生制動研究[D].?重慶:?重慶大學,?2011. [19]?張亞軍,?楊盼盼.?純電動汽車再生制動系統的建模與仿真[J].?武漢理工大學學報,?2010,?32(15):?90-94. [20]?楊亞娟,?趙韓,?李維漢,?等.?電動汽車再生制動與液壓ABS系統集成控制研究[J].?合肥工業大學學報:?自然科學版,?2012,?35(8):?1054-1058,?1125. Brake?Energy?Recovery?Control?Strategy?for?Rear?Drive?Pure?Electric?Vehicle MENG?Zewena,?ZHANG?Tiezhua,b,?ZHANG?Hongxina,b,?ZHAO?Qinghaia,b,?YIN?Huaixiana,b,?HOU?Dianpinga (a.?School?of?Electromechanic?Engineering,?Qingdao?University,?Qingdao?266071,?China;b.?Power?Integration?and?Energy?Storage?Systems?Engineering?Technology?Center,?Qingdao?University,?Qingdao?266071,?China) Abstract:??In?view?of?unreasonable?power?distribution?coefficient?of?electric?vehicles,?this?paper?mainly?stu?dies?of?rear?drive?pure?electric?vehicle.?By?analyzing?the?safety?distribution?area?of?braking?force,?with?the?iSIGHT?software,?the?braking?force?distribution?area?is?optimized,?and?the?optimal?distribute?on?interval?is?obtained.?On?this?basis,?a?new?regenerative?braking?control?strategy?is?put?forward.?The?whole?vehicle?model?of?electric?vehicle?is?established?in?AVL_cruise,?and?the?regenerative?br?aking?control?strategy?model?is?established?in?matlab/Simulink.?Joint?simulation?is?carried?out?under?different?braking?intensity?conditions.?Simulation?results?show?that,?compared?with?the?original?control?strategy,?The?energy?recovery?rate?of?the?new?control?strategy?is?obviously?improved?when?the?middle?braking?intensity?is?applied,?and?the?braking?stability?of?electric?vehicle?is?improved?at?high?and?big?braking?intensity.?It?shows?that?the?control?strategy?is?reasonable,?and?provides?a?theoretical?basis?for?the?regenerative?braking?of?electric?vehicles,?indepth?study?of?energy?recovery?and?braking?stability. Key?words:??rear?drive?electric?vehicle;?braking?energy?recovery;?control?strategy;?optimize;?simulation
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44