面向林火持續偵察的多無人機分布式控制方法
2020-03-25 10:31:48劉宇軒劉虎田永亮孫聰
航空學報 2020年2期
劉宇軒,劉虎,田永亮,孫聰
北京航空航天大學 航空科學與工程學院,北京 100083
森林火災每年在世界范圍內造成巨大的財產損失與人員傷亡[1],林火的蔓延受地形、風速風向、林木可燃物載量與含水量分布等多種因素影響,具有一定的不確定性。因此,即時更新的高質量火場信息一方面可以輔助應急處置決策者進行正確的人員與物資的調配[2],另一方面,還可以使火場前線的消防人員進行更為安全且高效的林火撲滅操作[3]。
針對火場信息的獲取,傳統的地面火場瞭望由于人為誤差與視線遮擋等因素,不能準確提供大范圍火場信息;衛星遙感數據實時性較差,且分辨率不能滿足實際使用需求;而載人飛行器的使用成本較高,機上操作人員的生命往往受到火場復雜環境的威脅[4-5]。由于現有火場偵察技術的低效,森林消防人員往往在缺乏林火蔓延信息的情況下就進入前線開展撲滅工作,具有極大地人身安全隱患[3]。因此,有必要發展一種更為經濟且高效的林火持續偵察技術,實現對森林消防工作的技術支撐與能力補充。
隨著近年來無人機技術與遙測技術的發展,攜帶視覺(紅外或可見光)傳感器的多無人機協同火場偵察成為了一種可行的解決方案,并能以相對較低的成本,滿足火場信息獲取的實時性、準確性和人員安全性的需求[5-8]。目前,針對多無人機火場偵察技術,國內尚未檢索到相關研究,國外研究者主要從2個方面進行了探索。
1) 面向系統集成與實際運用,Martinez-de-Dios等[9-12]將視覺傳感器、慣性導航和GPS等集成在現有無人機平臺上,通過多次可控真實火場的實驗,充分驗證了多無人機林火偵察的技術可行性。此外,Ambrosia和Zajkowski[13]驗證了攜帶可見光相機低空短航時(Low-Altitude Short-Endurance,LASE)無人機與攜帶紅外相機的中空長航時(Medium-Altitude Long-Endurance,MALE)無人機組合在林火信息收集中的作用。
2) 面向多無人機火場偵察協同控制策略,Casbeer等[3]假設無人機只能在有限距離內同基站及其他無人機進行火場信息交換,以降低信息交換延遲為協同控制目標,控制無人機對(UAV pair)沿順時針與逆時針按序出動。在此基礎上,Alexis等[14]假設無人機在匯合后進行折返,并基于火場信息共享與匯合點(rendezvous point)重計算,實現了多無人機在擴張火線上的動態分布。Ghamry和Zhang[4]基于簡化的橢圓火場蔓延模型構建無人機的參考路徑,并使用引導-跟隨(leader-follower)與滑模控制(Sliding Mode Control,SMC)方法,將多個四旋翼無人機均勻分布在預設的參考路徑上。與此方法類似,Sujit等[6]基于可擴張圓形火場假設,通過拍賣算法研究了多無人機多火點的分配問題,并通過擴張狀態控制器使環繞圓形林火邊界的無人機等距分布。Kumar等[15]基于林火邊界形狀函數構建偵察效用函數,并通過該效用函數梯度下降、無人機間相互作用勢函數與人工阻尼量生成每個無人機的控制向量,實現分布式的多無人機協同火場邊界偵察。同樣是勢場控制(Potential Field Control,PFC),Pham等[2]基于無人機矩形下視場角模型構建了偵察代價函數,用于實現無人機自主火場覆蓋與偵察。
相對于多無人機火場偵察的系統集成與應用,上述分布式或集中式火場偵察協同控制算法仍處于初步的理論研究階段,且具有如下幾個需要改進的地方:
1) 林火蔓延模型過分簡化,大部分研究中火線幾何形狀過于理想化。部分算法需要火線準確的地理幾何信息用于生成無人機參考路徑或者人工勢場。
2) 過分簡化的飛行約束,上述二維平面的無人機協同控制算法沒有考慮地形對無人機飛行控制的影響;沒有根據林火熱輻射等因素設置無人機安全飛行約束;沒有考慮風速對無人機飛行的影響;并且忽略了煙霧對觀測的遮擋作用。
3) 上述算法沒有具體定義多無人火場信息偵察效能,并研究火線延長與所需無人機數量的匹配關系。隨著無人機數量的增加,上述集中式多無人機控制算法往往具有較大計算成本。
本文針對目前多無人機火場偵察研究中存在的不足,基于經過強化學習訓練的神經網絡,提出了多無人機分布式雙層控制方法,作為初步嘗試與創新,本文中的方法是對上述問題的進一步分析與研究,實現了多無人機在局部信息下的火場持續偵察分布式控制。
1 無人機火場偵察建模
1.1 無人機控制模型
本文涉及的無人機控制模型如圖1所示,其主要由3大模塊構成,分別是無人機運動學模型、無人機飛控系統與多無人機雙層控制架構。

圖1 無人機控制模型
首先,對于無人機運動學模型的構建,參考文獻[16-17],在左手直角坐標系下,本文采用如下的固定翼無人機運動學模型作為多無人機雙層控制架構的控制對象:
(1)
(2)
式中:i∈{1,2,…,N}為無人機索引編號,N為無人機總數;(xi,yi,zi)為無人機空間坐標;Vi為無人機空速控制量(可取3個離散值:最大空速Vmax、巡航空速Vc以及最小空速Vmin);φi為無人機爬升角;ψi為航向角;Φu為無人機最大爬升角速度;Φd為最小爬升角速度;Ψl為無人機最大航向左轉角速度;Ψr為最大航向右轉角速度;[vwx,vwy,vwz] 為風速矢量,設風速大小為Vw;ui、vi分別為歸一化的無人機爬升角與航向角控制變量。
此外,無人機運動模型還應具有如下約束:
(3)
式中:φmin為無人機最小爬升角;φmax為最大爬升角;Δt為仿真步長;tn為仿真幀時刻;M為當前幀計數;Lmax為最大飛行距離。該約束對無人機的爬升性能和留空時間進行了限制。
其次,無人機運動學模型以多無人機雙層控制架構的輸出[ui,vi,Vi]為輸入,基于式(1)與式(2)的微分方程,采用歐拉方法生成控制執行間隔Δtc后無人機的空間位移量[Δxr,i,Δyr,i,Δzr,i],并將其作為當前無人機飛控系統的導航參考量。本文假設無人機飛控系統為理想黑盒,在每一個控制時間間隔Δtc(本文中,Δtc=Δt)內,無人機飛控系統結合傳感器觀測量,通過內置的導航控制算法,可生成無人機飛行操縱時序的直接控制量(即橫縱測三軸與推力控制量),并通過相應控制機構實現對應舵面偏轉與推力增減,最終使得無人機實現給定的參考位移。
最后,多無人機雙層控制架構的具體設計與控制量[ui,vi,Vi]的生成,將在第3節中詳細介紹。
綜上所述,本文在無人機實際飛行控制系統之上,通過構建的多無人機雙層控制架構與運動學模型,基于理想飛控系統假設,將控制目標從無人機直接操縱量的控制轉移到對無人機預期空間位移的控制。因此,本文提出的多無人機雙層控制架構的控制對象為上述無人機運動學模型,其中[ui,vi,Vi]為相互獨立的控制變量。
1.2 林火蔓延模型
作為多無人機協同偵察的對象,林火行為的建模至關重要。一方面,實時甚至是超實時的林火蔓延仿真可以作為虛擬應用環境,輔助設計與檢驗多無人機協同偵察控制算法。另一方面,在未來的實際使用中,林火蔓延模型可以根據無人機前方偵察到的最新火場情況,對火勢的蔓延進行預測,為其他消防力量提供必要的火勢預警。
近年來,隨著計算機技術的進步,林火建模與仿真有了較大的發展,一系列林火蔓延模型被提出[18-19]。根據林火呈現形式,火焰蔓延模型主要分為3種:向量模型、柵格模型以及水平集模型[19]。上述3種模型的優缺點如表1所示。

表1 火焰蔓延模型分類
相較于其他2種模型,林火蔓延柵格模型的離散化林火邊界形式(如圖2所示)可以集成更多林火屬性(如溫度、火焰高度,火線寬度等),但普遍存在的邊界變形問題極大限制了該模型的精度。為此,作為對柵格模型的改進,本團隊提出的蔓延速度誘導元胞自動機(SVICA)準經驗模型[19],在解決邊界變形問題的基礎上,還體現了地形、風速風向、可燃物載量與含水量分布等因素對林火蔓延的影響。因此,本文采用SVICA林火蔓延模型用于多無人機火場偵察控制算法的輔助設計與仿真驗證。
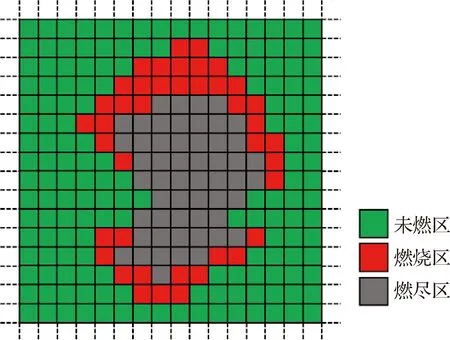
圖2 林火柵格模型
1.3 林火偵察傳感器模型
假設無人機可通過機載的慣性測量單元(Inertial Measurement Unit,IMU)、GPS以及陀螺儀無延時準確獲取空間位置與運動信息(xi,yi,zi,φi,ψi)。在此假設基礎上,本文控制算法涉及到的機載對地測距與火場偵察傳感器的簡化建模如圖3所示。
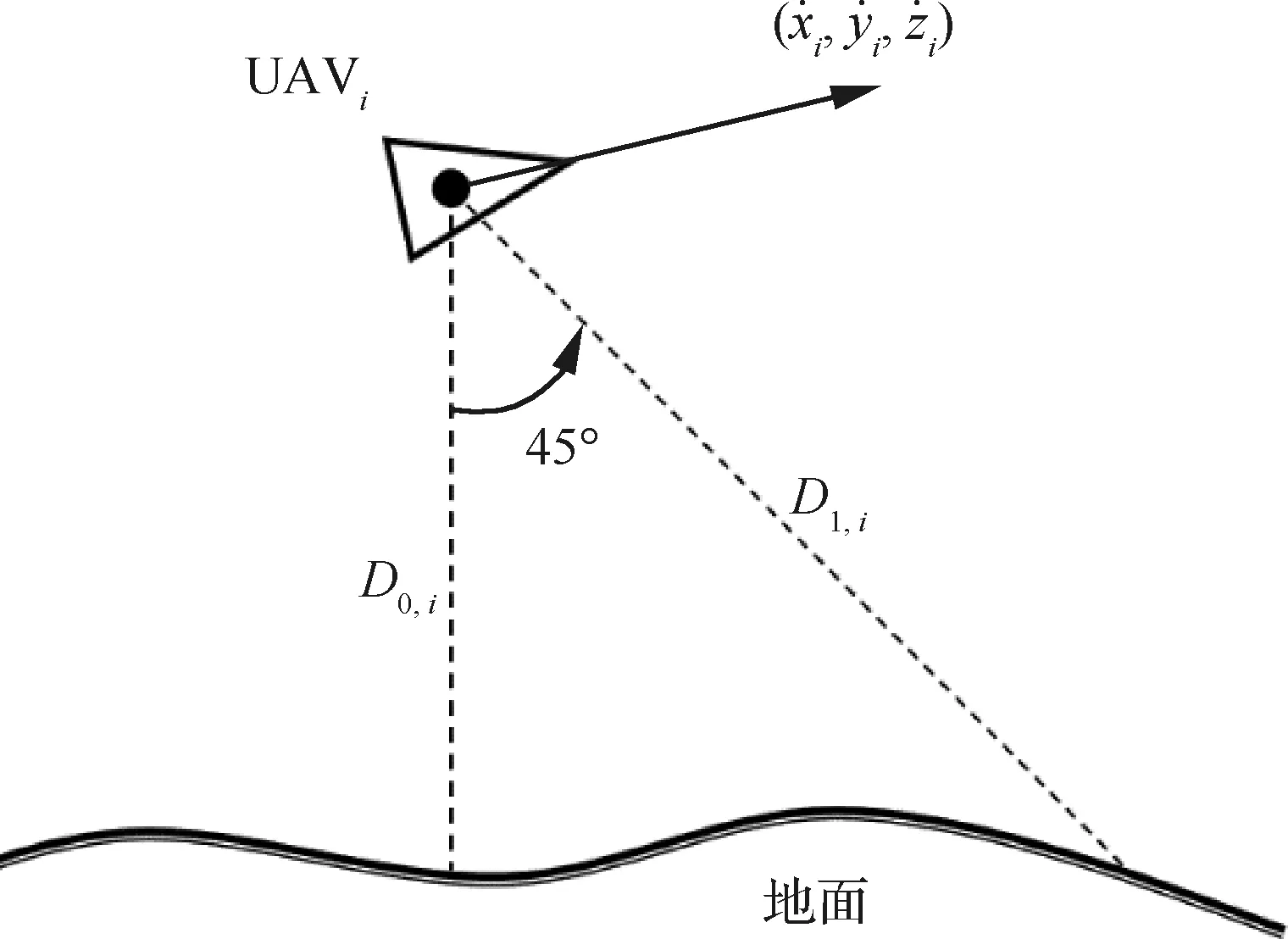
圖3 對地測距傳感器模型
如圖3所示,處于爬升性能約束內的無人機UAVi,其機載對地測量傳感器實時準確返回無人機的真高D0,i以及無人機鉛錘線前向45°對地測距值D1,i。


圖4 林火偵察傳感器模型
2 約束分析與問題描述
林火蔓延過程產生的大量煙霧,極大地降低了視覺傳感器的性能[9, 20],同時,考慮到飛行安全,無人機不能離火線過近或者穿越火場上空亂流。基于上述分析,無人機需要以較低的高度沿火場外圍飛行,執行持續的偵察任務。對于任意無人機UAVi,需要滿足以下約束條件:
(4)
式中:Hr為參考飛行真高;Ht為高度波動閾值;Rs為無人機安全距離;Rr為參考探測距離;Rt為距離浮動閾值;函數min(*)為獲取集合中最小元素。
在定義多無人機火場協同偵察整體效能之前,還需要對以下幾個概念進行說明。首先,在林火蔓延柵格平面內,每個正方形區塊Cx,z的邊長為a,(xa,za)為當前區塊坐標,Sx,z為當前區塊狀態(0為未燃燒,1為正在燃燒,2為已燃盡)。火線上的區塊定義為
(5)
此外,每個火線區塊對應一個偵測延遲Tx,z,初始值為0。當任意無人機首先偵測到火線區塊時,所有火線區塊的Tx,z開始計時。當區塊進入任意無人機偵測范圍時,該延遲清零;當脫離偵測范圍時,重新計時。因此,多無人火場協同偵察效能可用以下幾個指標衡量:
(6)
式中:card(*)函數為獲取集合元素個數;函數max(*)為獲取集合中最大元素;E和S分別為所有火線區塊偵測延時的期望與標準差;Tmax為當前火線偵測延時最大值,該值反映了火線區塊被無人機偵察的最大時間間隔。
綜上,以動態蔓延的林火為火場偵察的對象,本文提出的多無人機分布式控制方法的控制目標為:首先,在滿足所有約束的前提下,實現多架無人機在動態蔓延的林火外圍持續飛行。其次,考慮到火場復雜邊界形狀與風速引起的無人機地速沿飛行路徑分布不均勻等問題,提出新的無人機分布控制算法,盡量均勻地降低每個火線區塊被無人機偵測的時間間隔,并對不可控墜機與留空時間限制等因素引起的無人機數量變化有動態的適應性,本文將之定義為無人機群環繞路徑上動態時域均勻分布問題。最后,本文需要研究不同無人機初始數量與火線區塊偵測效能指標的關系,最終驗證無人機火場偵察出動策略的設計。
3 無人機雙層控制設計
3.1 控制架構
適用于林火持續偵察的多無人機雙層控制架構如圖5所示。本文提出的控制架構主要由無人機整體的策略層算法與無人機個體的行動層控制2個層級組成。策略層算法主要由火場偵察參數設置、路徑均勻分布控制、航向控制權重生成及發射回收控制策略構成。

圖5 多無人機雙層控制架構
由于本文采用的運動學模型中,航向角控制變量vi、爬升角控制變量ui與速度控制變量Vi對無人機預期航跡的控制相互獨立,行動層因此可分為3大獨立功能:地形跟隨、速度調整與航向自主控制。其中,地形跟隨功能根據實時對地距離探測信息、當前爬升角信息與參考飛行真高,生成爬升角控制量ui。速度調整功能包括無人機的定時加速與定時減速2個子功能。根據策略層無人機路徑均勻分布算法,實現無人機空速Vi在Vmax、Vc以及Vmin之間的離散切換。根據任務流程與外界環境因素,航向自主控制功能又由火場環繞、抗風修正與進出火場3個子功能構成。航向控制量vi最終由上述3子功能控制量輸出(va、vf和vp)加權求和獲得:
vi=w1va+w2vf+w3vp
(7)
式中:w1、w2和w3為航向控制量權重。
綜上,無人機UAVi行動層控制一方面需要無人機的一系列直接觀測量,同時還需要來自策略層算法生成的行動層控制變量(即參考飛行高度Hr、加減速時間tacc和tdec、參考探測距離Rr、以及參考飛行路徑pr)以及航向自主控制子功能的控制權重。
考慮到多無人機協同控制的復雜度與問題的聚焦度,本文將簡化無人機發射回收的流程(包括相關策略層與行動層控制算法的設計),并將研究重點放在進入火場任務區后無人機協同偵察控制實現與偵察效能分析,具體內容參考。
3.2 行動層控制
在行動層控制的設計中,地形跟隨功能與火場環繞功能使用基于強化學習(Reinforcement Learning,RL)的人工神經網絡(Artificial Neural Network,ANN)實現輸入量與控制量的映射,而抗風修正、定時加減速與進出任務區功能則使用傳統的基于人為規則的方式實現。
對于無人機UAVi,其地形跟隨功能ANN的結構如圖6所示,它包含2個隱含層,每層64個神經元;輸出層為俯仰控制量ui;輸入層包含3個輸入量,分別為s1,i、s2,i和s3,i,其定義為
(8)

s0,i=sgn(r0-r12)
(9)

圖6 地形跟隨ANN結構

圖7 火場環繞ANN結構
式中:函數sgn(*)為符號函數。
本文使用的上述兩個人工神經網絡ANN皆采用Swish函數[21]作為神經元的激勵函數,使用深度增強學習(PPO)算法[22]進行訓練。其中,地形跟隨ANN的訓練獎勵值Ru定義為
(10)
火場環繞ANN的訓練獎勵值Rv定義為
(11)
在上述神經網絡的強化學習過程中,若訓練對象獎勵值取得最小值,則重置對象的狀態。在完成一定步數的學習后,則停止ANN的強化學習,并按需對神經網絡的控制進行一定的人工修正,以實現預期控制目標。
對于行動層抗風修正功能,若只考慮到水平均勻風場對無人機飛行的影響,根據無人機水平速度投影與水平風速的夾角關系,本文采用的比例修正規則為
(12)
對于行動層定時加減速功能,若加速時間tacc和減速時間tdec都為零,則無人機空速Vi取巡航速度值Vc;若tacc>0且tdec=0,則無人機空速Vi在未來tacc時間內,取最大空速Vmax;同理,若tdec>0且tacc=0,則無人機空速Vi在未來tdec時間內,取最小空速Vmin。tacc與tdec不能同時非零,其值的定義將在策略層部分詳細定描述。
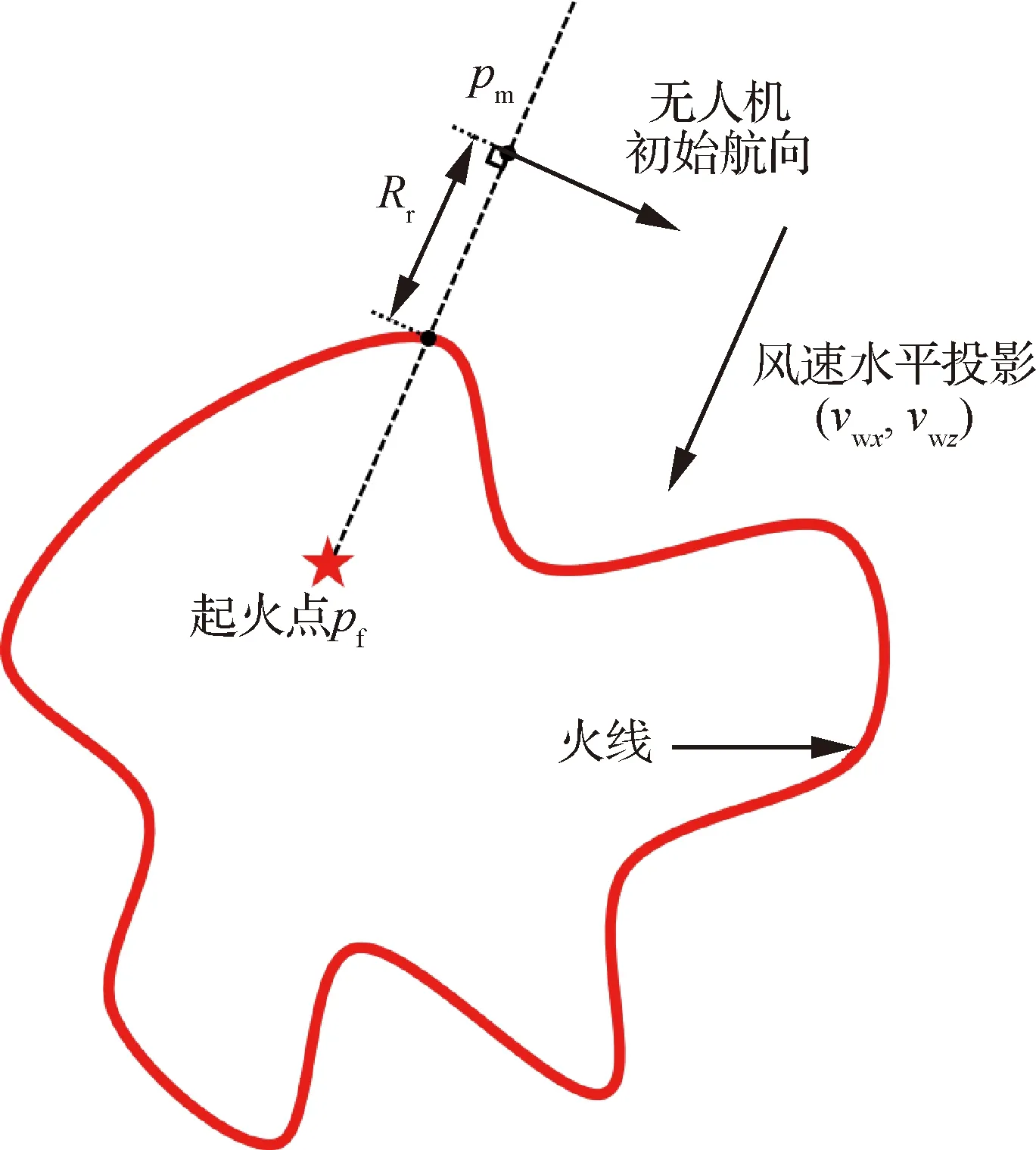
圖8 進出火場任務區假設

進出任務區航向控制首先使用Dubins[23]方法在策略層進行參考路徑的規劃,即生成無人機發射點(或回收點)與任務區集結點pm之間的水平投影路徑。然后根據當前無人機與參考路徑之間的距離及無人機航向,構建簡化的比例引導控制,最終生成對應航向控制量vp。由于進出火場任務區的航向控制并不是本文研究的重點,為了無人機協同火場偵察任務流程完整性,故只對其實現進行方法上的論述。在具體研究中,無人機進出火場任務區的控制將簡化為無人機在任務集結點pm的出動與回收問題。
3.3 策略層設計
作為多無人機火場偵察的協同控制的核心,策略層算法首先通過火場偵察參數設置模塊,設定每個無人機UAVi何時進入任務區并按照給定的參考飛行高度Hr與偵察距離Rr開始環繞火場飛行。無人機群在環繞火場偵察的過程中,每個無人機即時局部的觀測量被收集起來,用以實現火場態勢的整體態勢感知。
其次,策略層路徑均勻分布控制模塊基于累計飛行距離等信息,實現無人機群在環繞路徑時域上的近似均勻分布,其具體算法如下:
假定所有無人機按統一方向(順時針或逆時針)沿火場外圍飛行,無人機可隨時通過機間通信,動態確定環繞先后順序與當前運行無人機總數N。以最開始進入火場的無人機為1號機,對無人機UAVi按照式(13)賦予設置出動順序與隊列編號Xi,若出現插隊或掉隊的無人機,則立即對無人機群的索引與隊列編號進行更新。
Xi=ii∈{1,2,…,N}
(13)
當無人機UAVk(k∈{1,2,…,N})到達記錄起止點時,考慮達到火場面積的增加對無人機路徑的延長作用,任意無人機UAVi可在接收的最新Lall中可查找對應時刻ni的里程,并定義其標準路徑里程Lstd,i為
(14)
式中:ni為無人機UAVi標準里程在Lall的索引編號,可通過式(15)計算:
(15)
當所有無人機完成Lstd,i(i∈{1,2,…,N})的更新,定義當前標準路徑偏移量Loffset為
Loffset=Lone,1-Lstd,1
(16)
然后,根據當前各自路徑里程Lone,i與標準里程Lstd,i及Loffset,任意無人機UAVi定時加速時間tacc,i與定時減速時間tdec,i的計算方法為
若Lstd,i-Lone,i+Loffset≥0,則無人機UAVi當前里程相對理想里程滯后,加速時間tacc,i為
(17)
同理,若Lstd,i-Lone,i+Loffset<0,則無人機當前里程相對理想里程超前,減速時間tdec,i為
(18)
基于上述計算,在下一個無人機到達起止點前,任意UAVi將按照最大空速Vmax(或Vmin)立刻執行持續tacc,i(或tdec,i)時間的加速飛行(或減速飛行),并在結束時恢復巡航空速Vc。此外,若環繞火場的無人機數量N發生變化時,則需要重新計算各無人機tacc,i和tdec,i,并立即執行對應定時加減速飛行。在上述算法的設計中,為了獲得每一圈標準的里程集合Lall,1號無人機UAV1始終以巡航空速Vc環繞火場。綜上可知,隨著無人機依次抵達里程記錄起止點并觸發所有無人機定時加減速操作,無人機群將逐步實現環繞火場路徑時域上的動態均勻分布。
然后,針對航向控制權重的生成,本文考慮風速對無人機航向的影響,策略層算法通過在特定時間點改變航向控制權重值,實現無人機火場環繞與進出任務區行動間的切換,其對應的權值(w1,w2,w3)為
(19)
式中:ka和kp為控制量比例系數,用于調整風速修正項在航向控制vi的比例,系數的大小與風速大小相關。ka具體數值的計算將在實驗部分給出,kp由于進出任務區控制的簡化,將不在本文中具體討論。
4 仿真實驗與結果分析
本文使用Unity[24]作為仿真實驗平臺,并使用ML-agents工具箱[25]實現基于PPO算法的神經網絡訓練。
如圖9所示,Unity中大地直角坐標系為左手坐標系,無人機航跡坐標軸及無人機運動模型變量(xi,yi,zi,φi,ψi)的定義如圖9所示。對于質心處在點oi的無人機UAVi,航跡軸zk,i指向無人機的地速方向,xk,i始終與水平面平行。

圖9 Unity平臺下坐標系說明
為了充分驗證本文提出的多無人機分布式火場偵察控制算法,林火蔓延仿真部分沿用SVICA模型復現的希臘斯佩特塞斯島1990年森林火災的案例[19]。仿真的結果如圖10所示,隨著仿真的進行,從起火點向外,每小時火帶位置與形狀被記錄下來,最終仿真的11小時過火面積與真實過火面積誤差在3.22%[19],仿真的火焰蔓延行為具有較高的可信度。同時,對于無人機飛行的影響因素,本文繼續沿用案例[19]構建的島嶼三維地形及風速設定,三維地形如圖11所示,風場為均勻水平北風,風速為10 m/s。
基于表2所列參數值,將首先在無風情況下完成地形跟隨與火場環繞兩個ANN的訓練,之后在考慮風速情況下,通過實驗獲取最佳的航向控制量比例系數ka,最終完成整個多無人機分布式控制架構。最后,通過一系列的動態火場蔓延偵察實驗,驗證本文提出的控制方法。

圖10 SVICA林火蔓延仿真結果

圖11 Unity中斯佩特塞斯島嶼三維地形

表2 仿真參數列表
在進行環繞火場ANN訓練之前,首先在如圖10所示的三維地形上,使用5架相鄰的無人機以不同的隨機初始高度按照式(10)給出的獎勵值,通過PPO算法進行3倍速仿真加速學習。以2 000步為一個訓練周期,共20萬步的ANN學習情況如圖12(a)所示。


圖12 ANN訓練結果
其后,結合訓練好的地形跟隨ANN,在圖13所示的2小時(自起火計時)仿真蔓延形成的靜態火場,進行火場環繞ANN的訓練。在兩個重置坐標ps1和ps2以及對應重置航向上,各放飛5架無人機,并按照式(11)給出的獎勵值,同樣使用PPO算法進行3倍速仿真加速學習。總計20萬步的強化學習仍以2 000步為一個周期,火場環繞ANN的訓練結果如圖12(b)所示。

圖13 ANN訓練用仿真靜態火場
基于無風條件下完成訓練的地形跟隨與火場環繞兩個ANN,在10 m/s北風條件下,使用圖13所示靜態火場,以不同的控制量比例系數ka,在對應pm處順時針放飛單無人機UAV1,通過實時仿真(未加速),研究其一周最近火場測距min(R1)的變化情況,其標準差與平均值的實驗結果如圖14所示。
考慮到參考探測距離為100 m,ka在0.92處取得最小的最近測距標準差15.64 m以及局部較大的平均值93.50 m。為了保證風速影響下無人機環繞火場的距離穩定性,本文在后續實驗中,令ka=0.92。至此,面向林火持續偵察的多無人機分布式控制架構完成構建,下面將通過一系列仿真實驗對該架構進行驗證與分析。

圖14 不同ka對火場環繞的影響
假設所有無人機在火場蔓延兩小時開始自圖13所示的任務區集結點pm按圖示方向順時針進入火場,初始速度為Vc,以第1個無人機進入火場時刻為計時零點,無人機之間進入時間間隔為Tgap。根據無人機發射回收設定,當無人機由于航程Lmax限制自動脫離環繞序列,假設立刻有一無人機自脫離位置補充進偵察隊列。
在檢驗多無人機火場協同偵察之前,先通過單無人機UAV1的動態火場環繞飛行實時仿真,測試無人機行動層控制的效果。單無人機UAV1在第一圈環繞火場的爬升與航向角控制情況如下。
如圖15所示,在行動層控制模塊的作用下,無人機UAV1能夠在參考飛行真高Hr=50 m上下約1 m范圍內保持定高飛行,在參考探測距離Rr=100 m上下約40 m范圍內保持與火場的水平距離,且大于無人機安全距離Rs=40 m。由此可見,在風速及動態火場不規則外形等因素的共同作用下,無人機的航向探測距離的維持雖然波動較大,但基本滿足飛行安全約束。圖16通過正交與透視投影直觀展示了無人機UAV1火場環繞的三維航跡線。

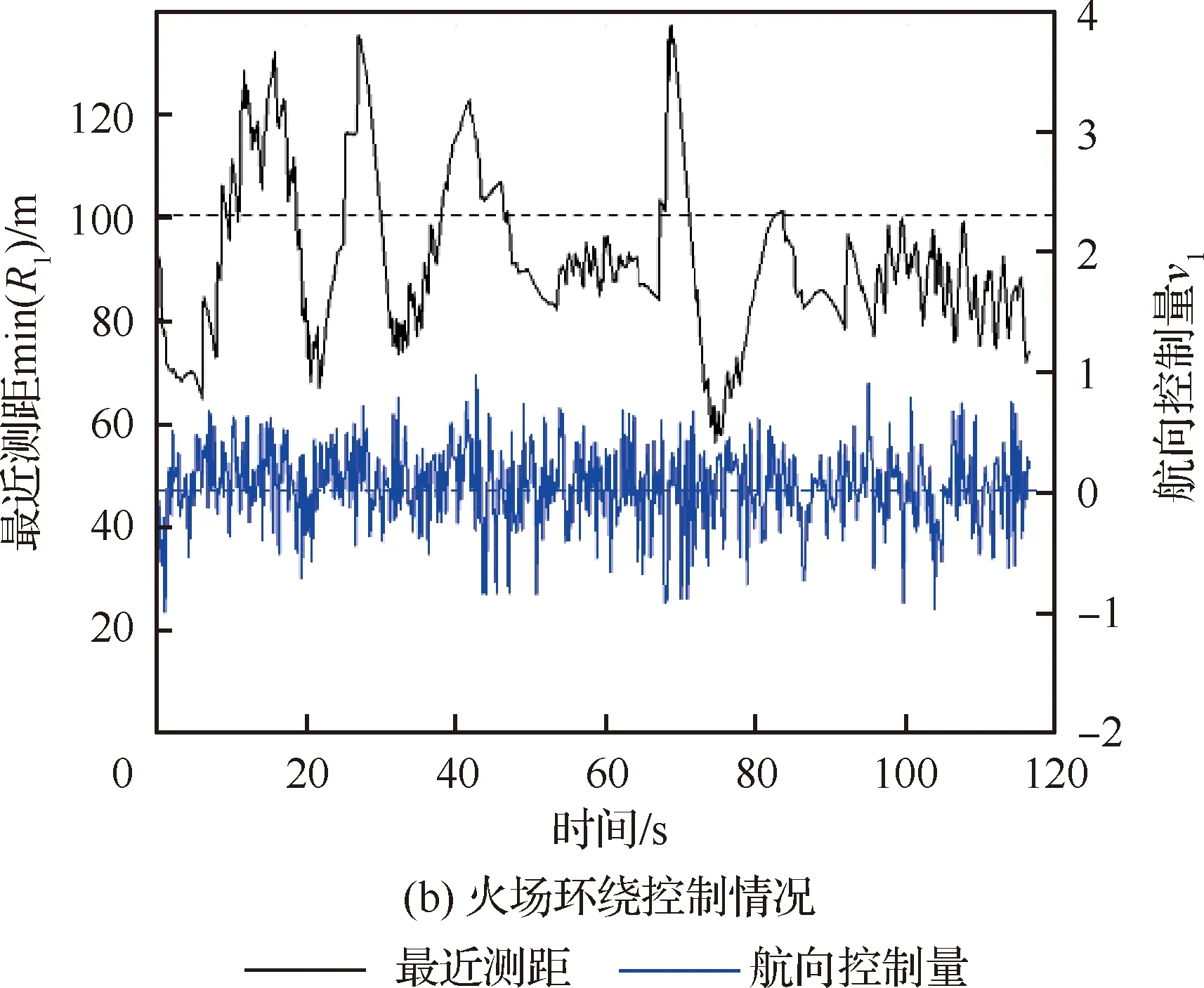
圖15 無人機UAV1爬升和航向控制情況
在行動層火場環繞與地形跟隨功能完成驗證的基礎上,下面測試多無人機路徑時域均勻分布算法的有效性以及對無人機數量變化的動態適應。


圖16 無人機UAV1環繞火場第一圈航跡線
假定5架無人機按照Tgap=10 s的時間間隔從pm依次發射,分別進行2次持續時間1 000 s的5倍速超實時仿真實驗:一個保持5架無人機初始出動間隔作為對照組實驗,另一個使用本文提出的均勻分布方法控制無人機適當加減速。兩次實驗記錄的3個火場協同偵察效能指標的變化情況如圖17和圖18所示。

圖17 效能指標Tmax的變化情況


圖18 效能指標E和S的變化情況
從圖17和圖18可知,當1號無人機在115.2 s完成第1圈偵察之前,所有無人機保持初始的出動間隔環繞火場,2次實驗對應的火線偵測延時期望E和標準差S以及偵測延時最大值Tmax的變化相同。對于使用時域均勻分布方法的那5架無人機,當1號無人機在115.2 s跨過里程記錄起止點后,方法開始控制無人機群進行適當的加減速以完成時間間隔上的均勻分布。可見經過后續2周的動態調整,當1號無人機在341.9 s第3次跨過里程記錄起止點后,火場協同偵察效能指標的變化趨于穩定,并以相鄰2個無人機時間間隔為周期小幅震蕩,且都隨著火場面積的增大有小幅度的增漲趨勢。反觀沒有使用均勻分布方法的那5架無人機火場偵察結果,由于風速造成無人機地速的不一致性與無人機群的相對密集的分布,對應的3個效能指標都在115.2 s后呈現大幅度周期性震蕩,且震蕩周期與無人機環繞火場一周用時基本一致。
2次實驗分別取342~1 000 s的結果進行統計,可得使用均勻分布方法的5架無人機E的平均值為2.66 s,S的均值為3.78 s,Tmax的均值為13.84 s,分別遠遠小于未使用均勻分布方法E的平均值17.03 s、S的均值19.74 s以及Tmax的61.98 s。穩定且較小的E、S和Tmax意味著,每個火線區塊被無人機群以較小時間間隔均勻的探測,無人機群的火場偵察能力得到了較為充分的利用。
在此基礎上,考慮無人機的數量的變化對均勻分布方法效果的影響。同樣使用5架無人機進行2次持續1 000 s的5倍速超實時仿真實驗。在都使用均勻分布方法的情況下,一次實驗在第500 s時去掉隊列編號為2的無人機,另一個實驗于第500 s時在pm處再加入1架無人機。
實驗結果如圖19和圖20所示,在無人機群已處于穩定均勻分布情況下,添加或去除一個無人機,偵測延時期望E和標準差S在經過一定時間的震蕩,在約600 s后趨于穩定,無人機群重新恢復到當前數量下的穩定均勻分布狀態。具體而言,使用兩次測試600~1 000 s數據進行統計,并與圖17與圖18(b)所示的未改變無人機數量的情況作對比:補充一個無人機后,6架無人機偵察下E的平均值下降到1.57 s,S的均值降為2.55 s,Tmax的均值將至10.23 s;損失1個無人機后,在4架無人機偵察下E的平均值增加到為5.00 s,S的均值增至5.93 s,Tmax的均值增加到20.12 s。

圖19 無人機補充或損失情況下E和S的變化情況

圖20 無人機補充或損失情況下效能指標Tmax的變化情況
通過上述實驗可知,本文提出的分布式控制方法可實現無人機群火場環繞路徑上時域的動態分布,且對于無人機數量的變化具有較高的魯棒性。下面通過一系列5倍速超實時仿真實驗具體研究無人機數量對火場偵察效能的影響。

由圖21可知,無人機單周環繞火場路徑長度在這1 000 s仿真過程中呈線性增長,線性增長率約為0.37 m/s,進而可推知火場邊界線的長度在上述仿真過程中也呈線性增長趨勢。在這種火場擴張近似穩定情況下,由表3所列的10次實驗可以得出,隨著無人機數量的增加,3個協同火場偵察效能指標快速下降,火場的態勢感知的實時性與均勻性顯著提高。
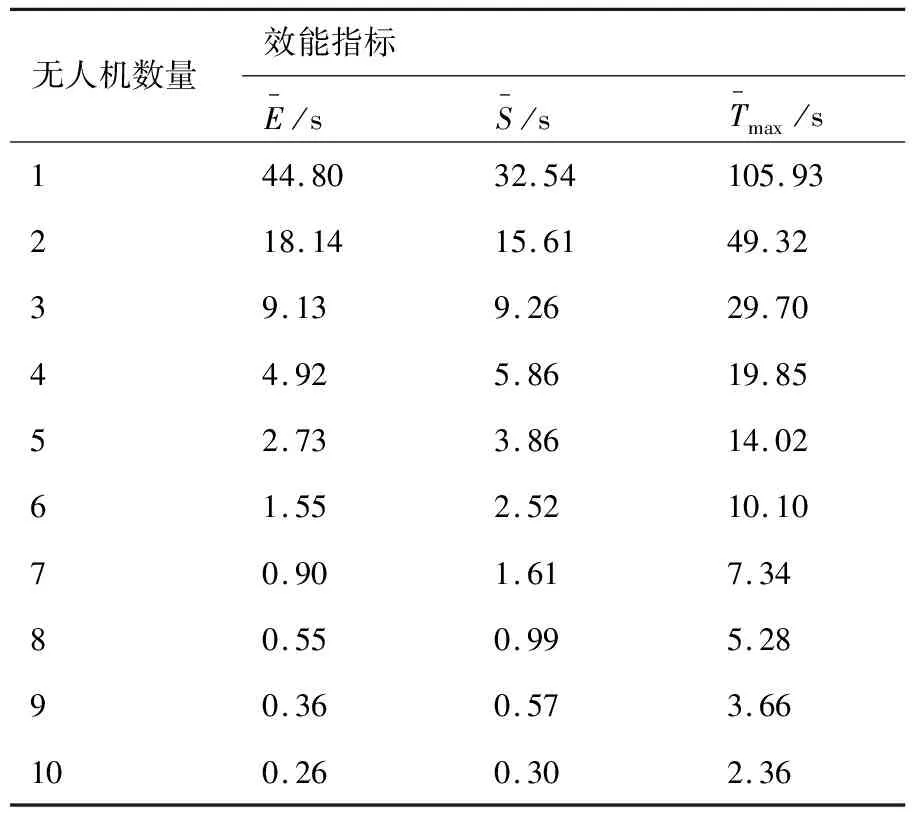
表3 無人機數量變化對效能指標影響

圖21 10架UAV均勻分布方法單周標準里程變化


表4 無有效覆蓋半徑rcover計算結果

(20)


圖22 2小時持續偵察測試結果
由圖22實驗結果可知,在500~7 200 s的無人機群環繞火場持續偵察實驗中,上述出動回收策略按照指定閾值T′max控制無人機的補充,分別在第1 075 s、3 195 s和5 604 s各增加了一架增援無人機。具體而言,由于航程限制,初始的5架無人機都進行了4次替換,后3架增援無人機分別進行了3次、2次和0次替換,2小時持續偵察實驗總共投入28架次無人機。參考圖22中虛線標注的區域,由于火場的不規則蔓延,部分火線區塊被包含在已經燃盡的區塊內部,且超出環繞火場無人機的偵測距離,在其自動熄滅前造成了Tmax的異常增高(特別是2 749 s到3 157 s區間內,Tmax一度達到279 s),進而使全局的E和S顯著增高。實際情況中,被過火區域包圍的火線不具有安全威脅,這些異常增高區間可忽略。
在持續2小時的火場偵察中,無人機單周標準里程估計由最初的3 163.0 m增加到了5 493.3 m,上述無人機出動回收規則首先較好的估計了Tmax的增長趨勢,其次適時出動的增援無人機,使得3個偵察指標控制在了可接受的范圍內。實驗結果充分證明了本文提出的多無人機分布式控制方法在動態火場持續偵察上的可行性與有效性。
5 結 論
1) 在作者以往林火蔓延仿真研究的基礎上,通過對無人機及傳感器的建模,完成了較為復雜的仿真環境的構建。在此基礎上,提出了多無人機持續火場偵察的效能指標。
2) 建立了多無人機分布式雙層控制架構,并基于PPO強化學習算法完成了無人機行動層火場環繞與地形跟隨兩個ANN訓練,并通過人工抗風修正方法實現了無人機基于局部偵察信息的自主火場環繞。在此基礎上,提出了多無人機火場偵察時域均勻分布的速度調整方法,實現對無人機群在數量可變情況下,等時間間隔火場環繞的動態控制。
3) 通過一系列仿真實驗與效能指標分析,本文提出的多無人機分布式控制方法得到充分的驗證。在此基礎上,通過對無人機數量與火場偵察效能的分析,提出了無人機出動閾值的概念,并通過長時間的仿真火場偵察實驗,綜合驗證了本文提出的多無人機分布式控制架構在火場持續偵察任務中的可行性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
