皮帶輸送機(jī)糾偏裝置的設(shè)計應(yīng)用*
2020-03-25 06:51:22郭波
機(jī)械研究與應(yīng)用 2020年1期
郭 波
(同煤集團(tuán)燕子山礦,山西 大同 037003)
0 引 言
皮帶輸送機(jī)具有輸送距離遠(yuǎn),功耗低,工作可靠的優(yōu)點,廣泛應(yīng)用于煤礦的生產(chǎn)運輸過程[1]。由于皮帶輸送機(jī)運行工況較為復(fù)雜,如運輸距離遠(yuǎn),所受載荷不均勻等問題,造成皮帶機(jī)在實際應(yīng)用中會產(chǎn)生很多故障[2]。皮帶機(jī)運行過程中皮帶的左右偏移會造成煤料灑落、皮帶機(jī)結(jié)構(gòu)受到破壞,零部件遭到磨損等問題,皮帶機(jī)的使用壽命大大降低[3]。
目前同煤集團(tuán)燕子山煤礦缺少對皮帶輸送機(jī)糾偏裝置的應(yīng)用,只對跑偏信號進(jìn)行監(jiān)測,當(dāng)檢測到故障信號時,對皮帶機(jī)需進(jìn)行斷電維修處理,而皮帶機(jī)跑偏的修復(fù)時間、物料清理時間等過程會直接耽誤和影響正常生產(chǎn)。因此,筆者針對皮帶輸送機(jī)跑偏故障的自動檢測與故障處理問題,分別進(jìn)行檢測裝置與糾偏裝置的設(shè)計探究,以解決燕子山煤礦皮帶機(jī)的自動糾偏問題。
1 皮帶跑偏故障的機(jī)理分析
皮帶機(jī)的主體結(jié)構(gòu)由皮帶、滾筒、托輥、驅(qū)動電機(jī)與傳動裝置等組成,主體簡化結(jié)構(gòu)如圖1所示,圖中省略了皮帶機(jī)的驅(qū)動部分。空載狀態(tài)下,皮帶的驅(qū)動和改向都通過滾筒完成,各滾筒之間的皮帶依靠托輥承載,皮帶的運行方向與滾筒和托輥的俯視中心線重合,在這種運行狀態(tài)下,皮帶機(jī)的輸送量最大,運行狀態(tài)最穩(wěn)定。皮帶在空載狀態(tài)下,運行方向主要受到自身重力的影響,如果安裝時,皮帶對稱布置的狀態(tài)較好,中線兩側(cè)的力相互抵消,兩側(cè)的皮帶在重力作用下向中間靠攏,皮帶將自動居中運行,不發(fā)生跑偏。
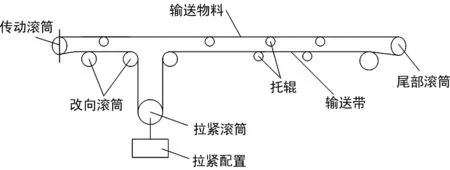
圖1 皮帶輸送機(jī)結(jié)構(gòu)簡化圖
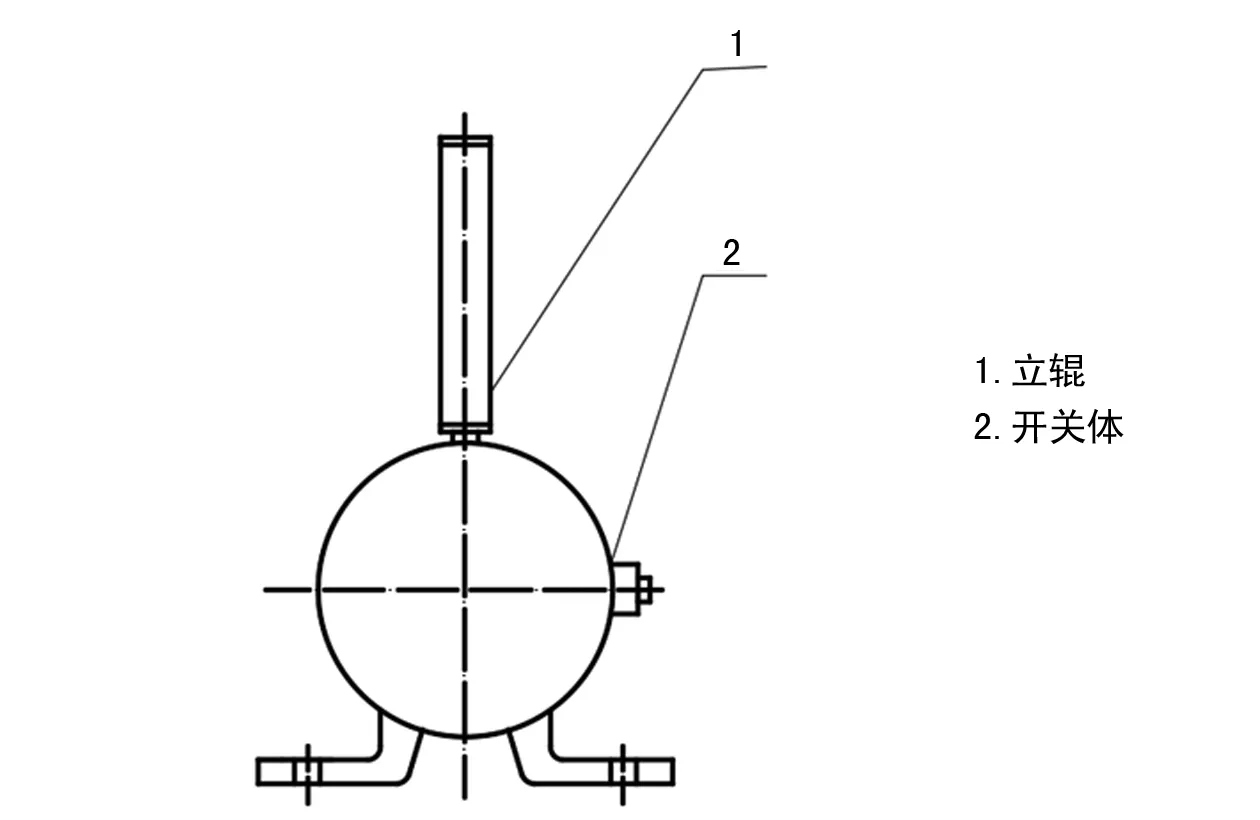
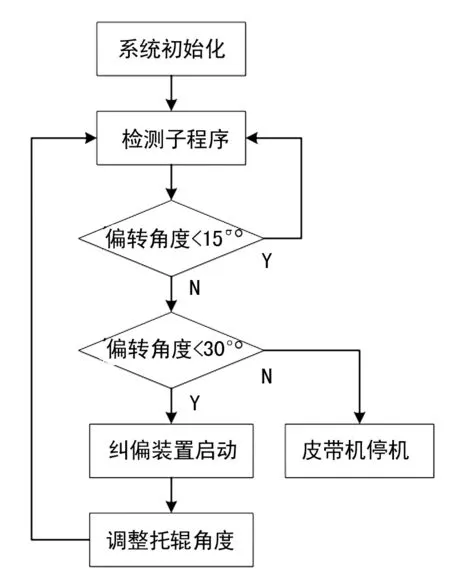
皮帶機(jī)主體結(jié)構(gòu)穩(wěn)定,無傾斜時,重載情況下的受力分布如圖2所示,此處將煤料分為左側(cè)煤料,中間煤料與右側(cè)煤料三部分,其中中間皮帶部分在物料的重力作用下,受到豎直向下的正壓力F;左側(cè)物料在重力作用下,對皮帶的左側(cè)斜面施加垂直于斜面向下的壓力F1與沿斜面向下的推力F2,F(xiàn)1與F2的矢量和為FG,右側(cè)物料與皮帶的受力情況與左側(cè)對稱,施加沿斜面向左的推力與垂直向下的壓力。當(dāng)F2′=F2時,皮帶處于居中狀態(tài),輸送機(jī)運行狀態(tài)良好,無跑偏;當(dāng)F2′>F2時,皮帶受到總體向左的推力,推力大小Fa=F2′-F2,皮帶左移,發(fā)生跑偏故障;當(dāng)F2′ 圖2 皮帶輸送機(jī)重載受力示意圖 結(jié)合以上理論分析,重點通過對皮帶機(jī)跑偏檢測裝置與糾偏裝置的設(shè)計,以解決皮帶機(jī)跑偏后自動糾偏的問題,縮短故障處理的時間,為煤礦正常生產(chǎn)運行提供保障。 為了實現(xiàn)皮帶機(jī)自動可靠的糾偏效果,裝置需要滿足的要求:適應(yīng)性強(qiáng);測量信息準(zhǔn)確;通訊穩(wěn)定可靠;無檢測盲區(qū);安裝簡單,操作方便。 皮帶機(jī)由于托輥軸線與主題機(jī)構(gòu)中心線不重合,滾筒圓柱度誤差大、接投不合格等原因,皮帶上的煤料可能會偏離運行中心,當(dāng)偏移量到達(dá)一定值后,輸送帶與側(cè)面的機(jī)架發(fā)生摩擦,造成磨損、撒料等后果。跑偏檢測裝置的作用就是監(jiān)測皮帶的運行情況,當(dāng)偏移量超過系統(tǒng)設(shè)定闕值后,檢測裝置將信號傳輸?shù)娇刂破鳎瑢ζ屏窟M(jìn)行糾正,避免發(fā)生安全事故。 皮帶的跑偏檢測裝置如圖3所示,安裝于皮帶輸送機(jī)的兩側(cè),當(dāng)皮帶發(fā)生偏移時,皮帶會觸碰到檢測裝置的立輥,皮帶帶動立輥轉(zhuǎn)動,打開裝置內(nèi)部的開關(guān),發(fā)出跑偏信號。立輥設(shè)有縱向回轉(zhuǎn)功能,當(dāng)煤料隨著皮帶的偏移對立輥發(fā)生沖擊時,立輥可沿著皮帶的運行方向發(fā)生一定角度的偏轉(zhuǎn),隨后依靠彈簧或者人工進(jìn)行復(fù)位。 跑偏檢測裝置的工作方式為分級檢測,當(dāng)立輥偏轉(zhuǎn)角度為15°~30°時,發(fā)出一級跑偏故障信號,利用糾偏裝置對皮帶位置進(jìn)行調(diào)整;當(dāng)皮帶繼續(xù)發(fā)生偏移,偏轉(zhuǎn)角度達(dá)到30°以上時,發(fā)出二級跑偏故障信號,皮帶機(jī)停機(jī)檢修。跑偏檢測裝置立輥的作用力取決于立輥的回轉(zhuǎn)角度,在保證立輥可自動復(fù)位的前提下,作用力應(yīng)當(dāng)越小越好,一般設(shè)置為20~60 N。 圖3 皮帶輸送機(jī)跑偏檢測裝置示意圖 在煤礦實際生產(chǎn)過程中,當(dāng)皮帶發(fā)生偏移時,無法立即停機(jī)維修,這時就要借助到糾偏裝置對皮帶的位置實現(xiàn)一個動態(tài)調(diào)整。常用的糾偏措施有以下四種:調(diào)整托輥的高低或與皮帶的夾角;調(diào)整擋料板與皮帶的接觸位置;調(diào)整驅(qū)動滾筒和改向滾筒相對皮帶的位置。此處設(shè)計的糾偏裝置主要是通過改變調(diào)心托輥的偏移角度,來實現(xiàn)皮帶位置的調(diào)整。 由皮帶受力分析可知,皮帶的跑偏不僅與物料自身重力影響有關(guān),還與兩邊托輥的角度有關(guān)。比如,當(dāng)皮帶向左偏移后,通過增大左側(cè)調(diào)心托輥的偏移角度,降低右側(cè)可將皮帶調(diào)心托輥的偏移角度,可實現(xiàn)皮帶位置的糾正。此設(shè)計的皮帶輸送機(jī)糾偏裝置安裝示意圖如圖4所示。 圖4 皮帶糾偏裝置安裝示意圖1.檢測裝置安裝支架 2.立輥 3.調(diào)心托輥 4.皮帶 5.平行托輥 6.開關(guān)體 此裝置采用推桿的方式控制托孤角度。糾偏托輥組分為調(diào)心托輥組與前傾托輥組,針對不同皮帶輸送機(jī),其具體布置方式可分為兩種:對于短距離皮帶輸送機(jī),在每10組槽形托輥的承載分支設(shè)置一組調(diào)心托輥組;對于中長距離的皮帶輸送機(jī),在輸送機(jī)的頭部和尾部分別設(shè)置前傾托輥組,在其他適當(dāng)位置設(shè)置調(diào)心托輥組。 糾偏裝置的控制器由PLC及相應(yīng)的控制電路組成,負(fù)責(zé)對檢測信號的處理,控制調(diào)心托輥組的偏轉(zhuǎn)角度。PLC控制器選用西門子公司的S7-300系列CPU314型號,具有結(jié)構(gòu)簡單,維護(hù)方便的特點,可滿足糾偏裝置的控制精度需求。糾偏裝置工作的流程設(shè)計如圖5所示。 圖5 糾偏裝置軟件流程圖設(shè)計 系統(tǒng)初始化后,皮帶機(jī)啟動,運行檢測子程序,監(jiān)測皮帶運行的位置情況。當(dāng)檢測到立輥偏轉(zhuǎn)角度在15°~30°范圍之間時,啟動糾偏裝置,PLC控制器根據(jù)偏轉(zhuǎn)的具體角度,計算調(diào)心托輥組所需的調(diào)整角度,糾正皮帶的位置。當(dāng)檢測到偏轉(zhuǎn)角度大于30°時,糾偏裝置報警,切斷皮帶輸送機(jī)電源,進(jìn)行斷電維修。 所設(shè)計的皮帶輸送機(jī)糾偏裝置,分為檢測裝置與執(zhí)行裝置兩部分,通過檢測皮帶的偏移量,可實時糾正皮帶的位置。根據(jù)實際應(yīng)用效果,裝置對偏轉(zhuǎn)角度處于15°~30°之間的糾偏效果可達(dá)85%,對偏轉(zhuǎn)角度>30°的情況同樣具有糾偏預(yù)警功能,改善了皮帶機(jī)的糾偏效果,提高了皮帶2~3倍的使用壽命。 所設(shè)計的皮帶輸送機(jī)糾偏裝置,有效的改善了燕子山煤礦皮帶機(jī)的糾偏效果,避免了頻繁停機(jī)維修帶來的經(jīng)濟(jì)損耗,有較好的實際應(yīng)用價值。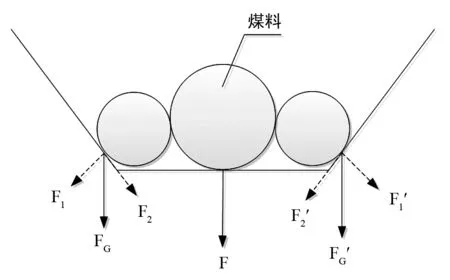
2 皮帶機(jī)糾偏裝置設(shè)計
2.1 皮帶跑偏檢測裝置設(shè)計
2.2 皮帶糾偏裝置設(shè)計

3 糾偏裝置工作流程設(shè)計
4 實踐應(yīng)用效果
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
裝備制造技術(shù)(2020年9期)2021-01-26 00:15:12
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
同煤科技(2015年2期)2015-02-28 16:59:14
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39