無人機測控通信系統中智能天線技術分析
2020-03-25 02:54:03孟祥宇
科學與信息化 2020年1期
摘 要 針對無人機測控與信息傳輸技術系統使用過程中存在的地面設備組成部分較為笨重,以及跟蹤速度較為緩慢問題,在地面設備上安裝了智能天線技術組件,在搭建形成測控技術系統仿真模型條件下,實現了對無人機運行路徑的有效跟蹤,在提升有用信號信噪比參數條件下,控制降低多徑干擾發生強度。文章將會圍繞無人機測控通信系統中智能天線技術,展開簡要闡釋。
關鍵詞 無人機;測控通信系統;智能天線技術;分析
為有效應對無人機測控與信息傳輸系統運行過程中普遍存在的地面設備較為笨重,以及無人機空間運行路徑跟蹤速度緩慢問題,有技術研究團隊創造性地將安裝在地面設備的傳統天線技術組件替換成智能天線技術組件,并且運用多重信號分類算法形態(MUItiple SIgnal Classification,MUSIC)實現了針對無人機機載終端設備的波達方向估計(Direction Of Arrival,DOA)技術目標,在去相關操作對抗多徑技術條件下,基于線性約束最小方差準則(Linearly Constrained Minimum Variance,LCMV)下的波束成形算法形態,完成了波束賦形處理環節,與傳統機械化跟蹤技術相比,體現出地面設備總體重量輕、制造成本低、機動性與靈活性強,以及跟蹤速度快等特點,實現了對原有技術問題的有效解決和改善[1]。
1 無人機測控通信技術系統仿真模型概述
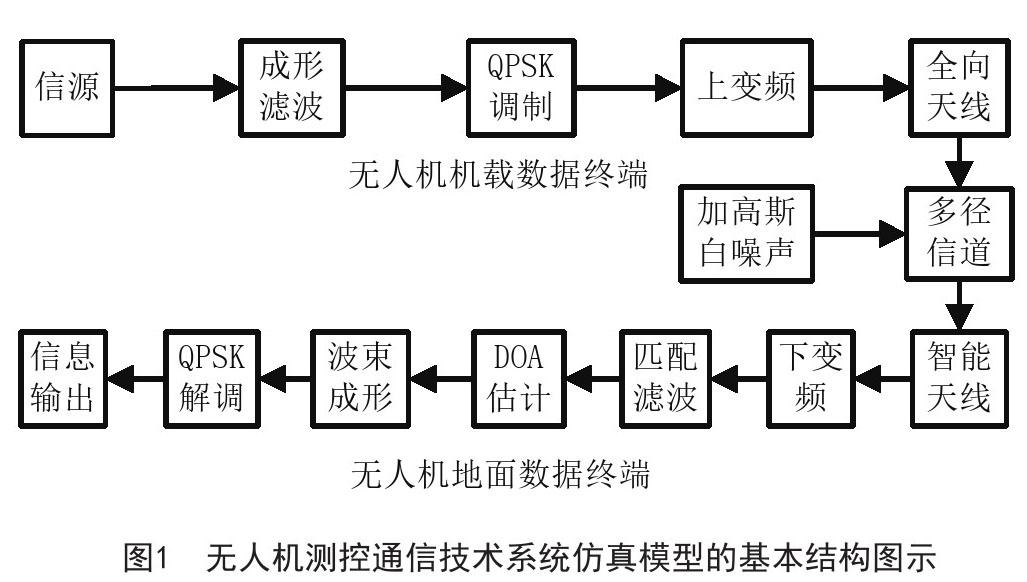
圖1表示無人機測控通信技術系統仿真模型的基本結構,這里假定機載端設備選用全向天線技術組件完成信號發射過程,地面端設備選用智能天線技術組件完成信號接收過程,且陣元個數設定值為8。
機載端設備中使用的信號源是經由隨機生成的偽隨機信號序列,其在接受成形濾波處理后會被轉化成帶限信號,之后借由四相相移鍵控(Quadrature Phash Shift Keying,QPSK)調控處理技術過程,能夠直接將比特級信號形態轉換成復調制信號形態,繼而經由上變頻技術模塊完成正交上變頻技術處理,最終借由全向天線技術組件將完成上述技術處理環節的信號向外發射。
實際對外發射的信號在經由多徑信道技術結構之后,將會與高斯白噪聲完成相互疊加過程,最終經由智能天線技術組件被地面端設備接收。在本次研究引入系統中,假定智能天線技術組件的極化處理方式為垂直極化,且陣元個數的設定值為8,陣元間距設置值為半個信號波長[2]。
在智能天線技術組件完成信號捕獲接收環節之后,要在經由正交變頻技術處理條件下,獲取對應的基帶信號,繼而運用低通濾波器技術組件開展匹配濾波技術操作環節,并且選用對半帶抗混疊低通濾波器技術組件,實現對傳輸信號的最優化接收技術目標。針對已經接收到的信號依次開展DOA估計處理環節和波束成形處理環節,最后經由開展QPSK解調處理環節,完成對原始發射信號的恢復技術處理目標。
2 波束成形算法的基本思路
現階段,具備自適應特點的波束成形技術處理算法種類較多,具體可以被劃分為基于最小均方誤差準則(Minimun Mean Square Error,MMSE)的波束成形技術處理算法、基于最大信干噪比準則(Max-Signal to Interference and Noise Ratio,Max-SINR)的波束成形技術處理算法,以及基于線性約束最小方差準則(Linearly Constrained Minimum Variance,LCMV)的波束成形技術處理算法。從宏觀角度分析,無論實際形成的波束成形技術處理算法基于上述三種基本準則中的哪一種,其在基本數量關系方面都具備等價性,均能基于某種具體形式對維納最優解加以表示[3]。綜合考慮多方面的技術制約因素,本研究選用基于LCMV準則的波束成形技術處理算法,且此種選擇基于以下兩個方面考慮:
其一,如果選用基于MMSE準則的波束成形技術處理算法,則需要在算法處理技術環節中引入參考技術信號,客觀上不利于實現對時頻技術資源的有效節約;如果選用基于Max-SINR準則的波束成形技術處理算法,則在計算處理技術環節執行過程中,必須預知待處理噪聲信號對應的數學方差,但是這一數據在實際技術應用中難以獲取,客觀上此種技術處理方法缺乏應用可行性。
其二,基于LCMV準則的波束成形技術處理算法在運用過程中僅需預知待處理信號的來波方向參數,而來波方向參數在運用DOA估計方法下可以獲取,客觀上表明基于LCMV準則的波束成形技術處理算法具備充足的技術應用可行性。
LCMV準則的實質,就是要在控制和確保有用信號的輸出處在固定狀態前提下,穩定獲取最小化的輸出功率,其數學描述方程的解為:
(1)
在(1)中,表示有用信號對應的方向矢量。
3 結束語
文章依據無人機設備測控通信系統的基本特點,以及未來發展需求,創造性地提出了在地面設備組成部分中安裝使用智能天線技術組件的方法,并且基于算法分析視角展開了簡要介紹,具備扎實且充分的參考借鑒價值。
參考文獻
[1] 陳適,金泉.探究輸電巡檢中無人機技術的應用[J].建材與裝飾,2020,(3):236-237.
[2] 王方,鄭璇,馬杰,等.無人機技術在中國野生亞洲象調查研究及監測中的應用[J].林業建設,2019,(6):38-44.
[3] 李延龍,寸杰宏,楊尚玉,等.無人機技術在輸電線路電暈放電檢測中的實際應用[J].電工技術,2019,(22):67-68,71.
作者簡介
孟祥宇(1993-),男,河北任丘市;畢業院校:燕山大學,學歷:本科,助理工程師,現就職單位:天津航天中為數據系統科技有限公司,研究方向:無人機測控通信。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
