激光測(cè)距系統(tǒng)的基本原理及應(yīng)用
2020-04-01 07:54:29羅杰黃裕健
科學(xué)與財(cái)富 2020年2期
羅杰 黃裕健
摘 要:現(xiàn)在距離的測(cè)量對(duì)人們的生產(chǎn)生活有著重要的意義,作為一種比較先進(jìn)的測(cè)距方式,激光測(cè)距已得到比較廣泛的應(yīng)用。激光測(cè)距是一種非接觸檢測(cè)技術(shù),且不受光線、環(huán)境溫濕度等影響,與其他類型的測(cè)距方式相比有著更衛(wèi)生、更耐潮濕、粉塵、高溫、腐蝕氣體等惡劣環(huán)境等優(yōu)點(diǎn)。可在不同的環(huán)境中進(jìn)行距離準(zhǔn)確的在線標(biāo)定,可直接用于水、酒、糖、飲料行業(yè)等液位控制,可進(jìn)行差值設(shè)定,直接顯示各液位罐的液位、料位高度,更可設(shè)定閾值,實(shí)現(xiàn)實(shí)時(shí)報(bào)警。本文介紹激光測(cè)距系統(tǒng)的基本原理,及其在工業(yè)計(jì)量中的應(yīng)用。
關(guān)鍵詞:激光;測(cè)距;脈沖式;相位式
1引言
如今,激光測(cè)距已在日常生活和社會(huì)生產(chǎn)中有著非常廣泛和實(shí)用的應(yīng)用。隨著激光技術(shù)和數(shù)字處理技術(shù)等科學(xué)技術(shù)不斷發(fā)展,激光測(cè)距將逐漸在生產(chǎn)和生活中有更全面的應(yīng)用。在社會(huì)生產(chǎn)生活中,我們多數(shù)情況下將激光運(yùn)用在自動(dòng)化控制,測(cè)繪等領(lǐng)域,也在精確定位方面運(yùn)用到激光。在高尖端領(lǐng)域,還可被用于測(cè)量飛機(jī)、云層、導(dǎo)彈及人造衛(wèi)星高度,在人工智能領(lǐng)域,能應(yīng)用于機(jī)器人的避障系統(tǒng)及測(cè)量系統(tǒng)。在軍事上,可用于戰(zhàn)場(chǎng)上測(cè)量火炮、坦克對(duì)目標(biāo)的距離,也可測(cè)量地形數(shù)據(jù),更好地提升精確打擊能力,提高武器的性能。總結(jié)起來說,激光測(cè)距等一類的非接觸式測(cè)量方法對(duì)我們的生產(chǎn)和生活具有很高的使用價(jià)值和重要意義。它能在航空航天領(lǐng)域帶來更新的突破,也能在軍事上提高軍隊(duì)的戰(zhàn)斗能力及武器裝備的性能。所以我們?cè)诜墙佑|式測(cè)量方面,需要我們進(jìn)行系統(tǒng)地、深入地研究。
中國在激光測(cè)距方面的研究開始于20世紀(jì)80年代。從古至今,我國已掌握了基本技術(shù)關(guān)于激光測(cè)距,同時(shí)也用此處理成功了許多工程問題,并研究制作出許多國產(chǎn)測(cè)距儀。例如,我國具有很高的性能的激光測(cè)距儀是由中國航天科工集團(tuán)制造的,它的射程可遠(yuǎn)達(dá)200米,精度有0.5 cm,是至今我國中性能比較高的產(chǎn)品。另一個(gè)由上海精密機(jī)械研究所制造的便攜式測(cè)距儀。
2激光測(cè)距系統(tǒng)的基本原理
2.1 激光測(cè)距系統(tǒng)的基本原理
目前,脈沖法和相位法更廣泛地應(yīng)用于激光測(cè)距領(lǐng)域。本文簡單介紹兩類激光測(cè)距方法。并對(duì)兩種方法進(jìn)行多方面的比較。
2.1.1 脈沖式激光測(cè)距原理
激光脈沖寬度只有幾十納米,這就說明了激光的瞬時(shí)功率比較大,能量集中。利用激光脈沖的上述特性,我們可以實(shí)現(xiàn)遠(yuǎn)距離測(cè)量。在實(shí)際測(cè)量過程中,常常是利用目標(biāo)物體的漫反射原理將激光脈沖反射回來,而不需要特定的合作目標(biāo)就能實(shí)現(xiàn)距離的測(cè)量。由于激光器具有連貫性好,亮度高,方向性強(qiáng),抗干擾性強(qiáng)等優(yōu)點(diǎn),因此受到土木工程師,工程師和軍事工程師的廣泛喜愛[1]。
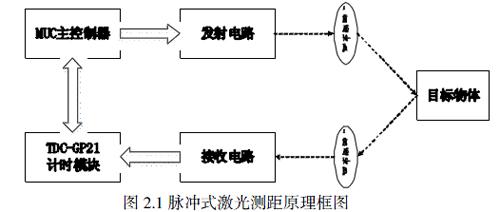
傳統(tǒng)的專用集成電路脈沖式激光測(cè)距儀的工作原理是在激光測(cè)距系統(tǒng)和被測(cè)目標(biāo)之間獲得的。通過計(jì)算目標(biāo)物體的距離值可以獲得激光脈沖所需的往返時(shí)間值。其原理如圖2.1所示:
圖2.1 脈沖式激光測(cè)距原理框圖
我們知道,激光脈沖持續(xù)的時(shí)間很短,當(dāng)它射向目標(biāo)物體時(shí),通過計(jì)算從到達(dá)被測(cè)目標(biāo)物體處反射信號(hào)的往返時(shí)間,則可間接地測(cè)量出距離。如圖2.1所示,主控制器通過發(fā)射電路,驅(qū)動(dòng)激光二極管向被測(cè)物體發(fā)射一段持續(xù)時(shí)間很短的單次激光脈沖。根據(jù)漫反射的原理,一些激光脈沖將發(fā)射到其他地方,另一部分將被光電傳感器反射回來并接收。 定時(shí)模塊主要負(fù)責(zé)檢測(cè)測(cè)量對(duì)象處的脈沖到達(dá)和測(cè)量對(duì)象反射回接收器之間的時(shí)間間隔,從而可以計(jì)算測(cè)距系統(tǒng)和被測(cè)對(duì)象之間的距離[2]。
通過上面的分析敘述,以及圖示,我們就可以利用一些常數(shù)和已知數(shù)據(jù),計(jì)算出被測(cè)目標(biāo)與激光測(cè)距傳感器的距離。假設(shè)t為激光脈沖往返的飛行時(shí)間,c是常數(shù),為光在空氣中的傳播的速度,L為被測(cè)物體的距離,則實(shí)際距離可通過公式(2.1)計(jì)算得出:
由公式(2.1)可知,這是一種間接測(cè)距法,距離的計(jì)算方法簡單且直觀,因?yàn)楣馑賑的數(shù)量級(jí)較大,為了使測(cè)距達(dá)到更好的精度,則要求計(jì)時(shí)t的精度要較高。
2.1.3 相位式激光測(cè)距原理
我們通常調(diào)節(jié)光強(qiáng)度是用相位的激光測(cè)距技術(shù),所以相位激光測(cè)距的精度以毫米為單位準(zhǔn)確度高。相位激光測(cè)距儀使用氣體激光器,具有良好的單色性和出色的相干性,如二氧化碳。
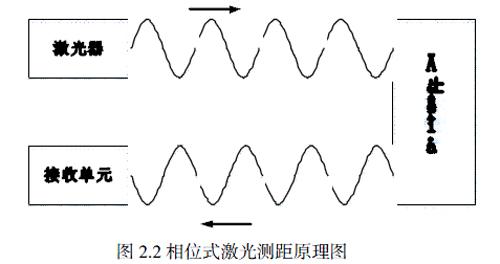
相位激光測(cè)距是測(cè)激光傳遞時(shí)間用實(shí)驗(yàn)過程中回傳波所引起的相位變化,最終我們找到目標(biāo)距離[3],其原理圖如圖2.2所示。要想系統(tǒng)時(shí)間測(cè)的很準(zhǔn)確,就需要被測(cè)目標(biāo)距離很大,因?yàn)楣馑偬臁S孟辔粫r(shí)間測(cè)量來調(diào)制光束的振幅要用無線電波頻率,并測(cè)量激光在目標(biāo)之間來回所引起的相位延遲。也可以使用激光的波長來計(jì)算對(duì)應(yīng)于相位延遲的長度。相位法通常用于精密激光測(cè)距儀,因?yàn)橄辔患す鉁y(cè)距通常可以達(dá)到毫米級(jí)的測(cè)量。所以要想得到很清楚的反射成像,則要我們把目標(biāo)物體固定在其中一個(gè)位置處[4]。測(cè)量單元、發(fā)射單元、接收單元為相位法激光測(cè)距系統(tǒng)的主要部件。
圖2.2 相位式激光測(cè)距原理圖
當(dāng)我們考慮到測(cè)量當(dāng)中的誤差結(jié)相位式激光測(cè)距的主要原理,可以把誤差的來源進(jìn)行列舉,大致分為以下幾種[5]:
(1)由于媒介轉(zhuǎn)換過程中,折射率會(huì)發(fā)生變化,則此會(huì)引起光速誤差;
(2)來自調(diào)制頻率不穩(wěn)定性產(chǎn)生的誤差;
(3)來自相位測(cè)量中的誤差。
根據(jù)系統(tǒng)誤差產(chǎn)生的原因,為減小誤差對(duì)測(cè)量準(zhǔn)確度帶來的影響,這就要求我們要重點(diǎn)考慮相位測(cè)量電路和調(diào)制頻率發(fā)生電路在整體電路系統(tǒng)的設(shè)計(jì)中的重要性,要悉心設(shè)計(jì),將誤差來源進(jìn)行把控。其實(shí),在電路及光路系統(tǒng)自身來說,在數(shù)據(jù)處理的過程中,我們可以通過改變固定偏量的方式來修正這類的附加相移;但我們無法修正隨機(jī)產(chǎn)生的附加相移,這些隨機(jī)的附加相移會(huì)根據(jù)測(cè)量環(huán)境的變化而不同,總體上會(huì)對(duì)實(shí)驗(yàn)結(jié)果產(chǎn)生較大的影響。
相位式激光測(cè)距的一般公式為:
公式(2.2)中D為已調(diào)制的激光在空氣中的傳輸距離,如果設(shè)在距離D上的往返時(shí)間為t,同設(shè)光在大氣中的傳播速度為c,那么距離D可由公式(2.3)表示為:
參考圖2.2,調(diào)制波最后到達(dá)激光發(fā)射處時(shí)相位超出了初始激光發(fā)射時(shí)相位的 ? ?角,此時(shí)有公式(2.4):
其中f表示為調(diào)制波的頻率。
將上述兩式合并,可得:
其中, ? ? ?為調(diào)制波經(jīng)過的N個(gè)周期與尾數(shù) ? ? ? ?的和,則公式(2.5)可以表示為:
在公式(2.6)中,其中整數(shù)N是無法得知的,學(xué)術(shù)上稱之為模糊距離[6]。為了克服模糊距離的缺點(diǎn),現(xiàn)在大多數(shù)測(cè)量都是用多測(cè)尺頻率進(jìn)行的,也就是說,當(dāng)我們采用較低的調(diào)制波進(jìn)行測(cè)量時(shí),由于波長較長,我們可以估算出測(cè)量目標(biāo)的大致距離,再通過一個(gè)較高頻率的調(diào)制波進(jìn)行測(cè)量,就可以精確地得到尾數(shù),與此同時(shí),我們可以根據(jù)低頻率測(cè)尺得出估算距離,計(jì)算得到整周期的個(gè)數(shù)N。通過多次的測(cè)量,則運(yùn)用不同頻率測(cè)尺的探測(cè),可以解決遠(yuǎn)距離測(cè)距與高精度之間的矛盾。
2.2 脈沖法與相位法激光測(cè)距的比較
從目前激光測(cè)距的應(yīng)用方面看,最常用的還是脈沖法和相位法,下面用表2.1,從五個(gè)方面對(duì)脈沖法和相位法測(cè)距進(jìn)行直觀地分析比較。
表2.1 脈沖式激光測(cè)距與相位式激光測(cè)距的比較
從表中可以看出,根據(jù)兩種測(cè)距方法的比較,則可根據(jù)自身的使用需求,選擇最合適的方法作為激光測(cè)距系統(tǒng)的測(cè)距方法。
3.激光測(cè)距系統(tǒng)的應(yīng)用
隨著我國工業(yè)的進(jìn)步,我們將會(huì)在越來越多的地方需要應(yīng)用到激光測(cè)距系統(tǒng)等類似的非接觸性測(cè)量系統(tǒng)。在工業(yè)生產(chǎn)中,我們不可避免的要用到液位控制系統(tǒng),液位測(cè)量的方法主要有接觸式和非接觸式兩種,多數(shù)情況下,譬如在飲料生產(chǎn)中,為保證飲料的可食用安全,并不適宜采用接觸式液位控制,亦或在化學(xué)產(chǎn)品生產(chǎn)中,因接觸性反應(yīng),也應(yīng)采用非接觸式測(cè)量系統(tǒng)。激光測(cè)距系統(tǒng)則將很好的應(yīng)用在非接觸式液位控制系統(tǒng)中,由此,激光測(cè)距系統(tǒng)的在工業(yè)上可實(shí)用性有很大的延伸。
參考文獻(xiàn):
[1]趙亞飛. 脈沖式激光測(cè)距機(jī)的設(shè)計(jì)與實(shí)現(xiàn)[D].鄭州.鄭州大學(xué),2017.
[2]田海軍,楊婷,趙楊輝.高精度脈沖式激光測(cè)距系統(tǒng)的設(shè)計(jì)[J].機(jī)床與液壓,2017,45(03):118-122.
[3]汪濤.相位激光測(cè)距技術(shù)的研究[J].激光與紅外,2014(01):29-31.
[4]程義濤,楊進(jìn)華.相位激光測(cè)距發(fā)射系統(tǒng)實(shí)驗(yàn)研究[J].長春理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2015,33(01):29-31.
[5]Jing Huang,Bao Quan Dong. The Research of Phase Method of Laser Ranging Measurement System[J]. Advanced Materials Research,2012,1673(479).
[6]Chi Zhang,Hu Huang. Design and Experiment of Phase Laser Ranging System Based on MEMS Mirror for Scanning Detection[J]. Key Engineering Materials,2015,3928(645).
