基于Arduino控制器的智能滅火救援機(jī)器人的設(shè)計(jì)與開發(fā)
2020-04-08 09:37:27閆旭吳穎建齊瑞紅
商情 2020年6期
閆旭 吳穎建 齊瑞紅

【摘要】近年來火災(zāi)事故頻頻發(fā)生,為減少當(dāng)中的人員傷亡,本文設(shè)計(jì)一款基于Arduino控制器的智能機(jī)器人代替人類實(shí)施滅火救援任務(wù)。本系統(tǒng)包含Arduino UNO的主控板、超聲波模塊、紅外模塊和攝像投等,并配置WiFi模塊實(shí)現(xiàn)手機(jī)無線控制。經(jīng)測(cè)試該系統(tǒng)運(yùn)行平穩(wěn),靈敏度高,實(shí)用性強(qiáng)。
【關(guān)鍵詞】救援機(jī)器人? Arduino? 消防控制
引言:由于機(jī)器人本身的智能性、靈活性以及可再生性,機(jī)器人已經(jīng)逐漸應(yīng)用于各行各業(yè)。面對(duì)無情的火災(zāi),消防官兵無法預(yù)測(cè)事故現(xiàn)場(chǎng),貿(mào)然進(jìn)入難免造成人員傷亡。因此,應(yīng)用智能機(jī)器人代替人類實(shí)施滅火救援任務(wù)是很好的選擇。縱觀消防救援機(jī)器人的發(fā)展,從最初的完全由程序控制的反應(yīng)比較機(jī)械的救援機(jī)器人到現(xiàn)在的具有感應(yīng)和反饋功能的消防機(jī)器人,消防機(jī)器人功能越來越復(fù)雜,也越來越智能化。然而當(dāng)前的消防機(jī)器人在自動(dòng)檢測(cè)方面還存在一定的缺陷,本文通過PWM的方式控制兩個(gè)舵機(jī),實(shí)現(xiàn)二自由度舵機(jī)的控制,利用超聲波測(cè)距傳感器實(shí)現(xiàn)對(duì)數(shù)據(jù)的采集,并使用Arduino單片機(jī)進(jìn)行數(shù)據(jù)采集、分析和車體的控制。整個(gè)系統(tǒng)可自動(dòng)檢測(cè)到前方一定距離的火源并自行前往實(shí)施滅火任務(wù)。
一、系統(tǒng)總體設(shè)計(jì)
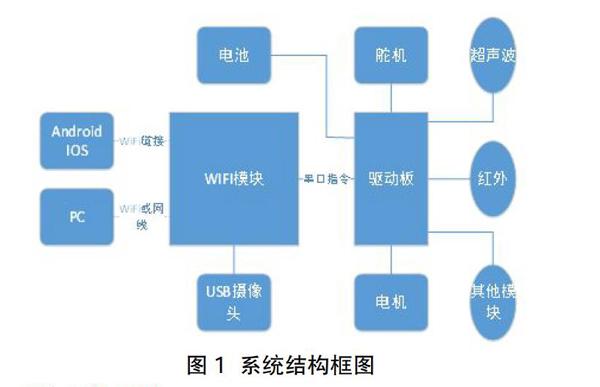
本設(shè)計(jì)以Arduino UNO R3主板和Robot-LinkV4.0 WIFI模塊為核心,以智能機(jī)器人為運(yùn)動(dòng)主體結(jié)構(gòu)來設(shè)計(jì)的,通過手機(jī)、平板等移動(dòng)設(shè)備或者PC端作為控制終端,經(jīng)過WIFI傳輸指令來控制機(jī)器人的運(yùn)行,并擁有紅外傳感器和超聲波測(cè)距模塊來實(shí)現(xiàn)機(jī)器人在尋跡、測(cè)距、滅火,機(jī)器人在移動(dòng)過程中通過攝像頭采集畫面,由WIFI信道傳遞到控制端,操作人員可以根據(jù)機(jī)器人返還的畫面來控制機(jī)器人的行動(dòng)。系統(tǒng)主要包括電源模塊,電機(jī)驅(qū)動(dòng)模塊,傳感器模塊,視頻采集模塊,WIFI傳輸模塊以及其他模塊,如圖1所示。
二、系統(tǒng)硬件設(shè)計(jì)
(一)電源模塊
電源所使用的的帶大電流保護(hù)板的18650鋰電池組,使用標(biāo)準(zhǔn)的5.5mm*2.1mm的圓形接口。經(jīng)過下位機(jī)驅(qū)動(dòng)板上的總開關(guān)后,給整個(gè)系統(tǒng)供電。①經(jīng)過大電容濾波后,直接電池電壓。給電機(jī)驅(qū)動(dòng)芯片供電,去驅(qū)動(dòng)小車電機(jī)。②經(jīng)過DC-DC降壓為5V,給舵機(jī)供電。經(jīng)過DC-DC降壓為5V后,給WIFI模塊、攝像頭供電。③經(jīng)過其他穩(wěn)壓芯片后,提供合適電壓給芯片、傳感器。
(二)WIFI模塊
WIFI模塊通過采集掛載在USB接口的MJPG格式的攝像頭的數(shù)據(jù),并編碼封裝成http協(xié)議的視頻流,默認(rèn)推送到8080端口。Android/IOS/PC設(shè)備,連接到WIFI模塊的熱點(diǎn)后,打開控制軟件,會(huì)自動(dòng)從8080端口獲取MJPG視頻流,并進(jìn)行解碼、顯示。由此實(shí)現(xiàn)了WIFI只能機(jī)器人的實(shí)時(shí)視頻傳輸功能。
此外,XRbot-Link WIFI模塊固件內(nèi)置了ser2net應(yīng)用程序,在WIFI模塊啟動(dòng)后,開啟TVP Sever,并開始監(jiān)聽2001端口,等待客戶端連接。當(dāng)Androd/IOS/PC設(shè)備連接到WIFI模塊的熱點(diǎn)后,打開控制軟件,開始作為TCP Client,通過2001端口,跟TVP Sever握手。此時(shí),上位機(jī)控制軟件既可以Write觸發(fā)的指令到2001端口,經(jīng)由Ser2net推送到WIFI的TTL硬件串口,再對(duì)下位機(jī)驅(qū)動(dòng)板進(jìn)行指令解析、執(zhí)行;也可以持續(xù)Read由下位機(jī)驅(qū)動(dòng)板通過串口發(fā)給WIFI模塊后,被ser2net程序轉(zhuǎn)發(fā)到2001端口的數(shù)據(jù),并進(jìn)行顯示。
(三)PWM舵機(jī)控制
舵機(jī)由脈沖寬度調(diào)制(Pulse Width Modulatio, PWM)來控制角度,PWM的高電平時(shí)間0.5-2.5mms對(duì)應(yīng)舵機(jī)的0-180°。脈沖寬度和舵機(jī)角度對(duì)應(yīng)關(guān)系如圖2所示。
舵機(jī)分為數(shù)字舵機(jī)和模擬舵機(jī)。模擬舵機(jī)需要持續(xù)的PWM來驅(qū)動(dòng),而數(shù)字舵機(jī)只需要給一次角度就可以穩(wěn)定在這個(gè)角度。
(四)傳感器模塊
此模塊主要有超聲波模塊和紅外傳感器。超聲波模塊采用的時(shí)間差測(cè)距法,通過超聲波發(fā)射器向前方發(fā)射40KHz超聲波,在發(fā)射的同時(shí)開始計(jì)時(shí),超聲波在空氣中傳播時(shí)碰到障礙物就立即反射回來,超聲波接收器收到反射波就立即停止計(jì)時(shí)。聲音在空氣中的傳播速度為v,而根據(jù)計(jì)時(shí)器記錄的發(fā)射和接收回波的時(shí)間差Δt,就可以計(jì)算出發(fā)射點(diǎn)到障礙物的距離s,即:
S=v*Δt/2
以上算出來的距離單位是米,代碼中一般使用厘米,所以會(huì)在結(jié)果上乘以100。
紅外傳感器部分通過紅外線照射到物體表面后發(fā)生反射,紅外接收頭在接收到反射回來的紅外光信號(hào)后,會(huì)改變自身電阻,當(dāng)反射線強(qiáng)度大到一定程序,電阻低于設(shè)定值,會(huì)觸發(fā)比較器狀態(tài)變化,輸出低電平,在我們看來就是檢測(cè)到障礙物了。
(五)電機(jī)模塊
電機(jī)就是一種將電能與機(jī)械能想換轉(zhuǎn)換的電磁機(jī)械裝置,一般有兩種應(yīng)用形式:
第一種是把電能轉(zhuǎn)換為機(jī)械能,稱之為電動(dòng)機(jī);第二種把機(jī)械能轉(zhuǎn)換為電能,稱之為發(fā)電機(jī)。直流電機(jī)的轉(zhuǎn)動(dòng)方向和電流方向有關(guān),當(dāng)電流從正->負(fù)時(shí),電機(jī)順時(shí)針旋轉(zhuǎn),反之逆時(shí)針旋轉(zhuǎn);兩邊同時(shí)正轉(zhuǎn)2,前進(jìn);同時(shí)反轉(zhuǎn),后退;左正右反,原地右轉(zhuǎn);反之,原地左轉(zhuǎn)。
三、系統(tǒng)軟件設(shè)計(jì)
(一)開發(fā)環(huán)境
本程序在Arduino IDE的開發(fā)環(huán)境下進(jìn)行開發(fā)與調(diào)試,采用Arduino代碼編寫程序。Arduino ide是一款專業(yè)的Arduino開發(fā)工具,主要用于Arduino程序的編寫和開發(fā),擁有開放源代碼的電路圖設(shè)計(jì)、支持ISP在線燒,同時(shí)支持Flash、Max/Msp、VVVV、PD、C、Processing等多種程序兼容的特點(diǎn)。
(二)整體調(diào)試
通電后,程序開始初始化,舵機(jī)寫入角度,超聲波傳感器開始運(yùn)行,當(dāng)檢測(cè)到前方出現(xiàn)物體時(shí),會(huì)反饋給操作端,并下達(dá)指令滅火。
四、總結(jié)
本文以Arduino為核心控制板,設(shè)計(jì)了一種能進(jìn)行自動(dòng)滅火救援的智能機(jī)器人,完成了硬件和軟件的結(jié)構(gòu)設(shè)計(jì),經(jīng)過試驗(yàn)驗(yàn)證,設(shè)計(jì)的機(jī)器人實(shí)現(xiàn)了距離判斷和進(jìn)行滅火的功能。試驗(yàn)結(jié)果良好。在現(xiàn)代救援過程中具有很高的實(shí)用性。
參考文獻(xiàn):
[1]陳偉哲, 黃夢(mèng)醒, 吳迪,等. 消防輔助救援機(jī)器人群設(shè)計(jì)研究[J]. 軟件工程, 2019,(9).
[2]田帥,吳長(zhǎng)忠, 宋翔文. 基于STM32的消防救援機(jī)器人設(shè)計(jì)[J]. 科技創(chuàng)新導(dǎo)報(bào), 2018, v.15;No.440(08):132-134.
[3]姜志海,單片機(jī)原理及應(yīng)用[M].北京:電子工業(yè)出版社,2005.
[4]倪銀堂, 呂迪洋, 王振豪. 消防機(jī)器人的研究現(xiàn)狀綜述與展望[J]. 自動(dòng)化應(yīng)用, 2017,(2):28-29.
基金項(xiàng)目:北京聯(lián)合大學(xué)“啟明星”大學(xué)生科技創(chuàng)新項(xiàng)目(201911417SJ105)
作者簡(jiǎn)介:閆旭(1997-),男,北京人,主要研究方向電子系統(tǒng)設(shè)計(jì);*通訊作者:齊瑞紅 (1974-),女,河南周口市人,碩士,高級(jí)工程師,主要研究方向?yàn)橛?jì)算機(jī)科學(xué)技術(shù)和智能教學(xué)系統(tǒng)管理。