列車設(shè)備箱自動裝配系統(tǒng)設(shè)計
2020-04-10 06:39:48楊智才林群煦吳月玉劉勝祥翟玉江鄭錦瑞
機(jī)械 2020年3期
關(guān)鍵詞:設(shè)備
楊智才,林群煦,吳月玉*,,劉勝祥,翟玉江,鄭錦瑞
列車設(shè)備箱自動裝配系統(tǒng)設(shè)計
楊智才1,林群煦1,吳月玉*,1,劉勝祥1,翟玉江1,鄭錦瑞2
(1.五邑大學(xué) 軌道交通學(xué)院,廣東 江門 529020;2.中車廣東軌道交通車輛有限公司,廣東 新會 529100)
目前列車設(shè)備箱的裝配采用人工或半自動化的方法進(jìn)行裝配,主要存在需要人員多、工作周期長等問題。為此,本文提出一種列車設(shè)備箱智能裝配系統(tǒng)設(shè)計的研究。首先,設(shè)備箱放置于機(jī)器人上面以后,機(jī)器人通過自主循跡方式運(yùn)動到車輛下方的設(shè)備箱安裝位置;其次,采用攝像頭進(jìn)行圖像識別和定位,令設(shè)備箱的安裝孔與車輛底部的螺栓或裝配孔對準(zhǔn),并抬升到預(yù)定位置;最后,操作人員進(jìn)行設(shè)備箱螺栓的緊固后,機(jī)器人退出安裝位置并自主運(yùn)動回預(yù)定位置,準(zhǔn)備其他設(shè)備箱的裝配。此系統(tǒng)能夠顯著減少人手、縮短裝配時間。
列車設(shè)備箱;智能裝配;自主循跡
《中國制造2025》提出把智能制造作為信息化和工業(yè)化深度融合的主攻方向,而為了服務(wù)國家實(shí)現(xiàn)制造強(qiáng)國的戰(zhàn)略目標(biāo),各行業(yè)骨干企業(yè)和高等院校、科研院所等建立了一批產(chǎn)業(yè)創(chuàng)新聯(lián)盟、協(xié)同推進(jìn)智能裝備和產(chǎn)品的研發(fā)工作[1-2]。先進(jìn)軌道交通裝備是大力推動的重點(diǎn)領(lǐng)域突破發(fā)展之一,立足自身的基礎(chǔ)和優(yōu)勢,五邑大學(xué)軌道交通學(xué)院與生產(chǎn)企業(yè)協(xié)同研發(fā)一種列車設(shè)備箱智能裝配系統(tǒng)[3]。
目前列車設(shè)備箱的裝配多為定位作業(yè),天車、人、氣墊搬運(yùn)車等一起協(xié)同工作完成裝配,主要存在精度、需要人員多、工作周期長等問題[4-5]。為此,本設(shè)計開展列車設(shè)備箱的自動化裝配的研究,從而減少人手、縮短裝配時間。
1 總體設(shè)計
如圖1所示,列車設(shè)備箱智能裝配系統(tǒng)由搬運(yùn)平臺和機(jī)器人控制系統(tǒng)兩大部分組成。機(jī)器人控制系統(tǒng)由硬件和軟件組成:硬件包括上位機(jī)(工控機(jī))和與傳感器、下位機(jī)連接的端口設(shè)備;軟件指基于ROS(Robot Operating System,機(jī)器人操作系統(tǒng))、Qt(Qt Creator,界面開發(fā))和OpenCV(Open Source Computer Vision Library,計算機(jī)視覺)開發(fā)的機(jī)器人操作系統(tǒng),用于接收、分析傳感器的信號,與下位機(jī)通信,從而控制和檢測搬運(yùn)平臺的運(yùn)動狀態(tài),提供可視化界面為操作人員監(jiān)控設(shè)備箱自動裝配機(jī)器人提供方便[6]。
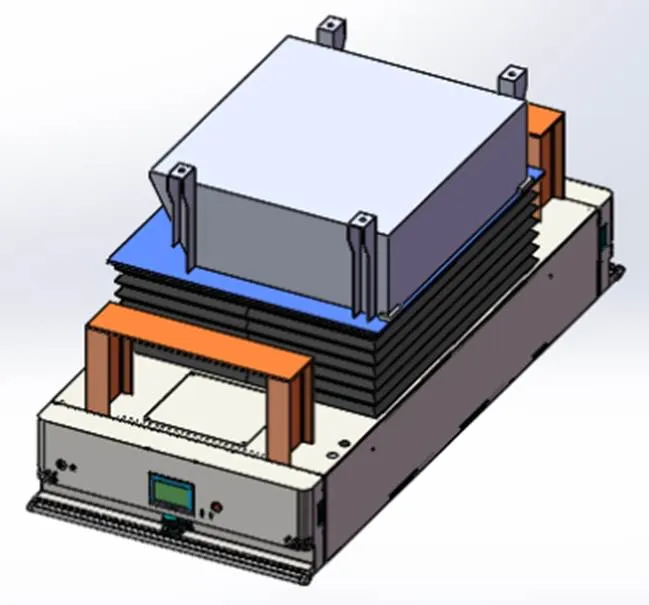
圖1 列車設(shè)備箱自動裝配機(jī)器人
裝配機(jī)器人停放于上料點(diǎn),設(shè)備箱通過天車等方式放置在機(jī)器人上;機(jī)器人依靠電子羅盤、激光雷達(dá)和攝像頭實(shí)現(xiàn)自主導(dǎo)航,移動到與車下設(shè)備箱平行處;接著,機(jī)器人平移到設(shè)備箱的安裝工位處。通過攝像頭跟蹤螺栓上標(biāo)志物的位置,首先調(diào)整機(jī)器人移動底盤的姿態(tài),接著進(jìn)行四自由度運(yùn)動裝置的精密調(diào)節(jié),令設(shè)備箱的安裝孔與車輛底部的螺栓精確對中,最后完成設(shè)備箱的舉升[7]。
1.1 搬運(yùn)平臺
搬運(yùn)平臺是設(shè)備箱自動裝配的實(shí)體,由機(jī)械結(jié)構(gòu)和下位機(jī)組成。搬運(yùn)平臺可以采用人工操控方式完成設(shè)備箱的自動裝配;操作人員通過機(jī)器人操作系統(tǒng)輸入控制任務(wù)以后,搬運(yùn)平臺接受上位機(jī)(工控機(jī))的指令,進(jìn)行設(shè)備箱的自動裝配。
總體機(jī)械結(jié)構(gòu)如圖2所示,搬運(yùn)平臺由底部的移動底盤和底盤上的四自由度運(yùn)動裝置兩大部分組成。本方案的設(shè)計在不增加其他輔助元器件的前提下可以完成不同規(guī)格設(shè)備箱的裝配。支撐架在放置比較長的設(shè)備箱時作為輔助支撐作用。針對不同的設(shè)備箱要設(shè)置相應(yīng)的定位夾具進(jìn)行定位和緊固,同時設(shè)置多個水平泡保證設(shè)備箱的平衡度。
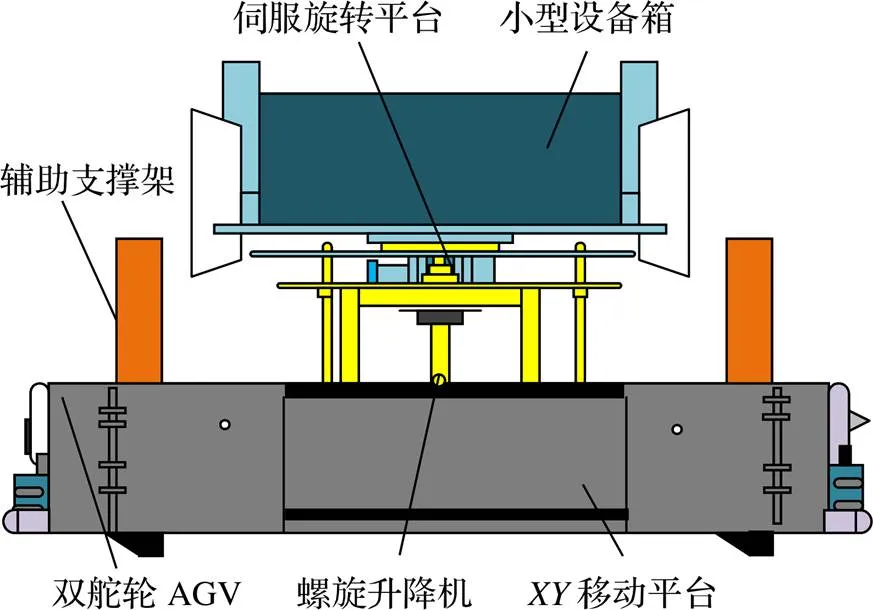
圖2 設(shè)備箱自動裝配機(jī)器人示意圖
設(shè)備箱通過紅外、超聲波傳感器等監(jiān)測設(shè)備箱是否遇到障礙物或者即將觸碰到車體,機(jī)器人可作出預(yù)警提示并停止運(yùn)動,同時需要操作人員現(xiàn)場排除障礙,確認(rèn)可繼續(xù)工作[8]。除了對中定位攝像頭以外,還安裝了多個觀察其他安裝孔的攝像頭,對抬升過程中安裝孔和螺栓的干涉進(jìn)行人工判斷和自動識別監(jiān)控。設(shè)置限位接觸開關(guān)防止設(shè)備箱過度抬升與橫梁發(fā)生碰撞,保證設(shè)備的安全。針對不同設(shè)備箱,螺栓對中定位裝置的支撐塊采用多自由度的滑軌加限位的靈活方式,便于操作并保證裝配精度。
1.2 移動底盤
由于設(shè)備箱安裝空間狹小,外界干擾比較大,對設(shè)備的靈活度要求高,在能滿足重載并不破壞工作地面的前提下,該系統(tǒng)的移動底盤如圖3所示。
運(yùn)動采用雙舵輪驅(qū)動、輔助萬向輪承載的方式。雙舵輪驅(qū)動行走方向可實(shí)現(xiàn)前進(jìn)后退、左右平移,轉(zhuǎn)彎半徑可實(shí)現(xiàn)直接平移或原地轉(zhuǎn)90°[9]。在直線運(yùn)動模式下,直線度達(dá)到運(yùn)行5 m的偏差不超過1 cm。在最大負(fù)載時,速度不低于20 m/min;在低速階段,運(yùn)動速度可以低至1 mm/s。
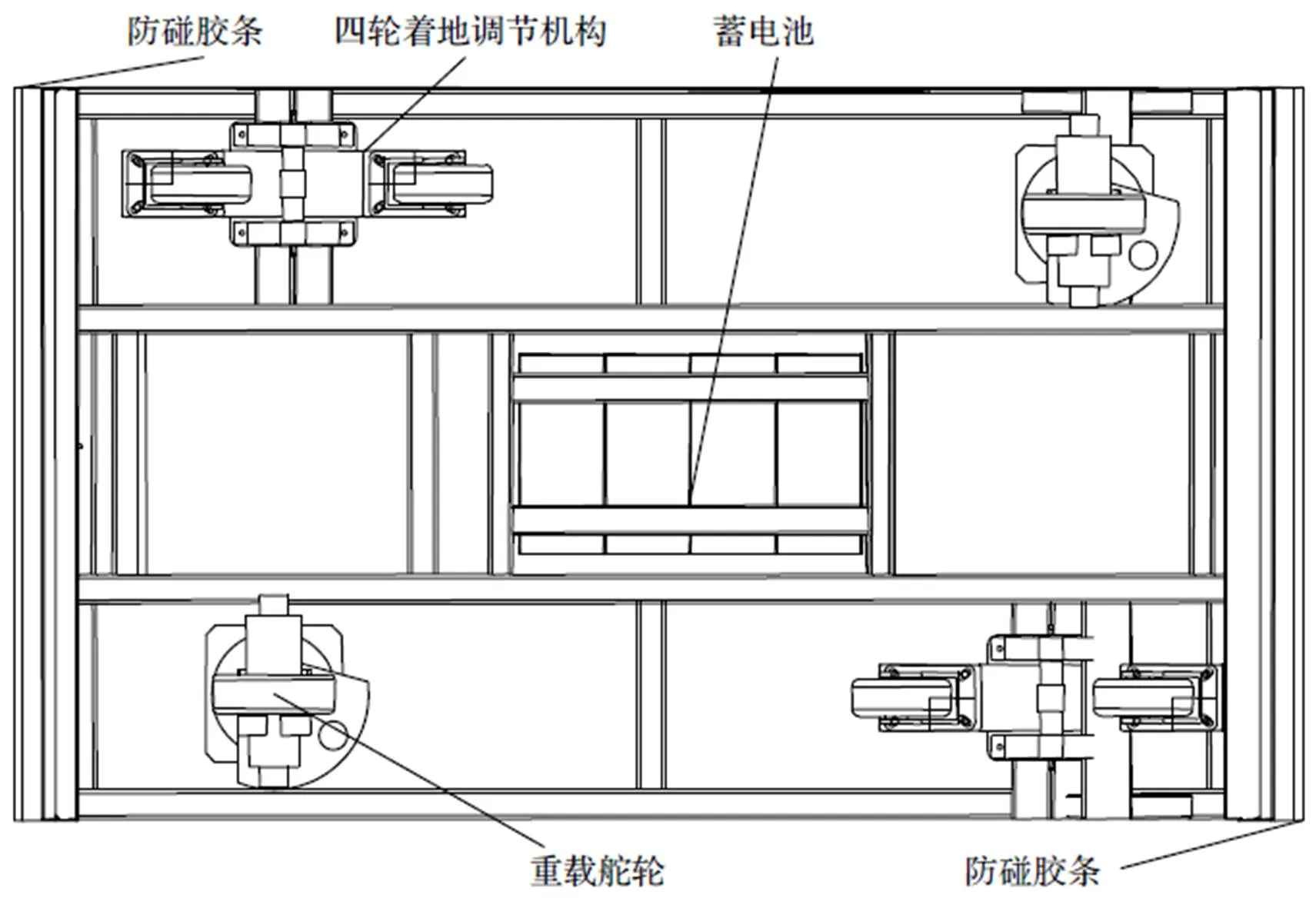
圖3 移動底盤結(jié)構(gòu)圖
1.3 四自由度運(yùn)動裝置
對角雙舵輪驅(qū)動的精度并不高,為了滿足裝配的高精度要求,精確定位采用四自由度的定位裝置。該四自由度運(yùn)動裝置具有、和軸的平移,以及繞軸旋轉(zhuǎn)的四個自由度,實(shí)現(xiàn)設(shè)備箱安裝孔和螺栓的最終對中定位[10]。最大負(fù)載能力為1 t,放置負(fù)載的平臺面積為2 m×1.5 m(最終尺寸根據(jù)實(shí)際要求來確定)。和軸運(yùn)動的范圍是±100 mm(即總行程為200 mm),定位精度為0.05 mm,軸的運(yùn)動精度為0.1 mm。旋轉(zhuǎn)運(yùn)動的精度為0.05 mm/1.5 m(0.05 mm表示旋轉(zhuǎn)時,搬運(yùn)平臺的四個角處的位移精度,1.5 m表示搬運(yùn)平臺中心到四個角的距離),對應(yīng)的旋轉(zhuǎn)角度精度為0.0019°。旋轉(zhuǎn)角度的范圍是±5°。旋轉(zhuǎn)機(jī)構(gòu)選用伺服旋轉(zhuǎn)平臺。為保證安裝精度,盡量減小負(fù)載放置于四自由度裝置后的傾斜。
2 導(dǎo)航方式
在不增添其他導(dǎo)航設(shè)備并盡量減少標(biāo)志物安裝的前提下,實(shí)現(xiàn)裝配系統(tǒng)的自主導(dǎo)航,本系統(tǒng)采用三級定位和導(dǎo)航的方式,實(shí)現(xiàn)機(jī)器人的自主巡航和螺栓對中定位裝配。機(jī)器人的運(yùn)行路徑如圖4所示。
2.1 第一級定位和導(dǎo)航
第一級定位和導(dǎo)航從處(上料點(diǎn))到處及處,采用高精度電子羅盤、光電導(dǎo)航傳感器和舵輪內(nèi)置的編碼器結(jié)合的導(dǎo)航方式[11]。電子羅盤可以保證機(jī)器人在整個運(yùn)行過程中保持姿態(tài)與車體縱向以及地面黃線平行。在處,機(jī)器人裝載設(shè)備箱后將根據(jù)電子羅盤的信號調(diào)整自身的姿態(tài)直到與車體平行。舵輪轉(zhuǎn)向,機(jī)器人由處平移,直到光電導(dǎo)航傳感器檢測到處黃線后停止。光電導(dǎo)航傳感器選用8位光電導(dǎo)航傳感器,經(jīng)過測試該傳感器可以檢測綠色油漆地板上的黃線。
在電子羅盤不斷修正機(jī)器人姿態(tài)以及光電導(dǎo)航傳感器檢測地面黃線的共同作用下,機(jī)器人從處直線運(yùn)行到處。如圖4所示,從1處到2處地面是沒有黃線的,這需要依靠電子羅盤和舵輪的直線性保證航向不偏移,同時舵輪內(nèi)置的編碼器可以計算從處開始的路程(如果沒到處附近機(jī)器人不會停止運(yùn)行),從而保證順利通過無黃線線路。部分黃線破損比較嚴(yán)重,對光電導(dǎo)航傳感器的檢測會造成一定的影響,甚至?xí)?dǎo)致機(jī)器人偏離黃線。為此,用編碼器計算從處開始的位移量,如果沒到處附近機(jī)器人不會停止;降低光電導(dǎo)航傳感器對破損黃線的敏感度,也就是光電傳感器的檢測結(jié)果不是以某時刻而是以一段時間內(nèi)的結(jié)果為準(zhǔn)。
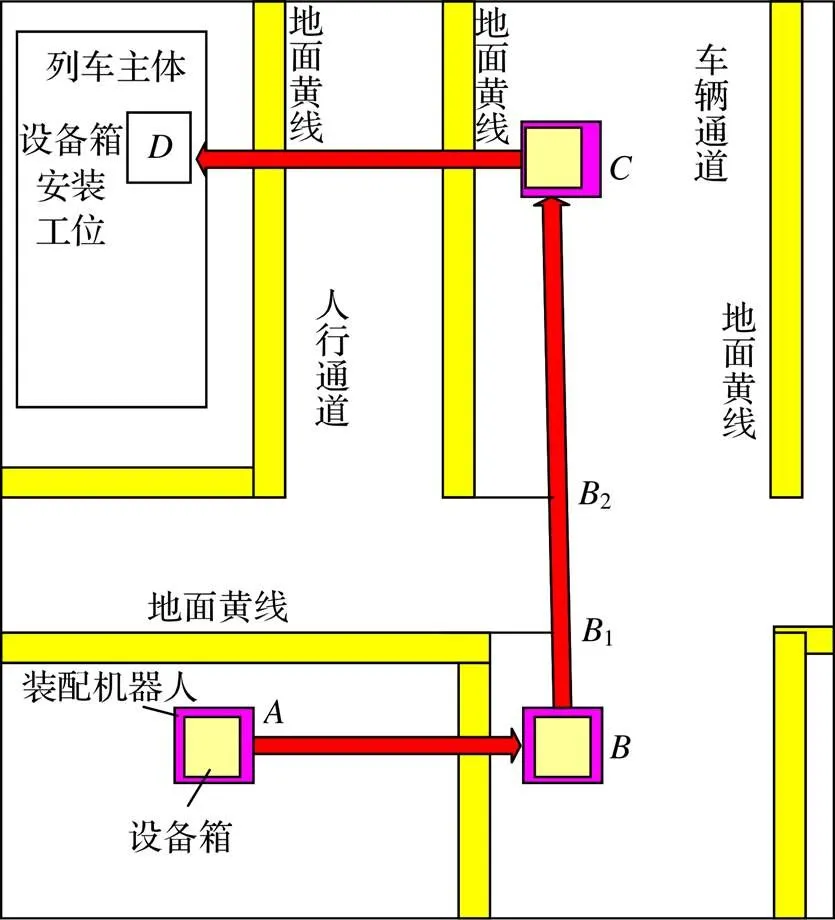
圖4 裝配機(jī)器人搬運(yùn)路徑
2.2 第二級定位和導(dǎo)航
第二級定位和導(dǎo)航,機(jī)器人從處運(yùn)動到處。依靠電子羅盤、激光雷達(dá)和攝像頭完成機(jī)器人在安裝位置的定位,定位精度預(yù)計達(dá)到10 cm以內(nèi)。
激光雷達(dá)可以掃描周圍物體、建立二維地圖,根據(jù)標(biāo)志物與自身的相對位置,引導(dǎo)機(jī)器人精確定位和運(yùn)行[12]。激光雷達(dá)的一大特點(diǎn)是能夠測量物體的反光率,不同的反光率用不同的顏色顯示出來。根據(jù)這一特點(diǎn),在標(biāo)志物上粘貼具有強(qiáng)反光率的貼紙,將有利于避免激光雷達(dá)受到周圍物體的干擾。
為實(shí)現(xiàn)機(jī)器人沿列車縱向方向(軸方向)的精確定位,在左側(cè)螺栓左側(cè)的地面分別設(shè)置兩個粘貼了強(qiáng)反光率貼紙的標(biāo)志物,兩個標(biāo)志物的縱向位置與兩個螺栓對應(yīng),如圖5所示。激光雷達(dá)監(jiān)測到兩個標(biāo)志物與自身的相對位置,從而實(shí)現(xiàn)機(jī)器人的縱向定位。

圖5 裝配機(jī)器人縱向定位原理圖
為實(shí)現(xiàn)機(jī)器人的橫向(軸)定位,在對角的兩個螺栓底部中心加上紅色的標(biāo)志物,該標(biāo)志物帶磁性可以吸附在螺栓上,如圖6所示。同時,在設(shè)備箱對應(yīng)的安裝孔位置放置兩個豎直朝上的攝像頭。機(jī)器人向左運(yùn)動時,攝像頭會對螺栓底部的紅色標(biāo)志物進(jìn)行視覺檢測和位置計算,直到攝像頭運(yùn)行到螺栓正下方位置。即實(shí)現(xiàn)了機(jī)器人的橫向定位[13],如圖7所示。
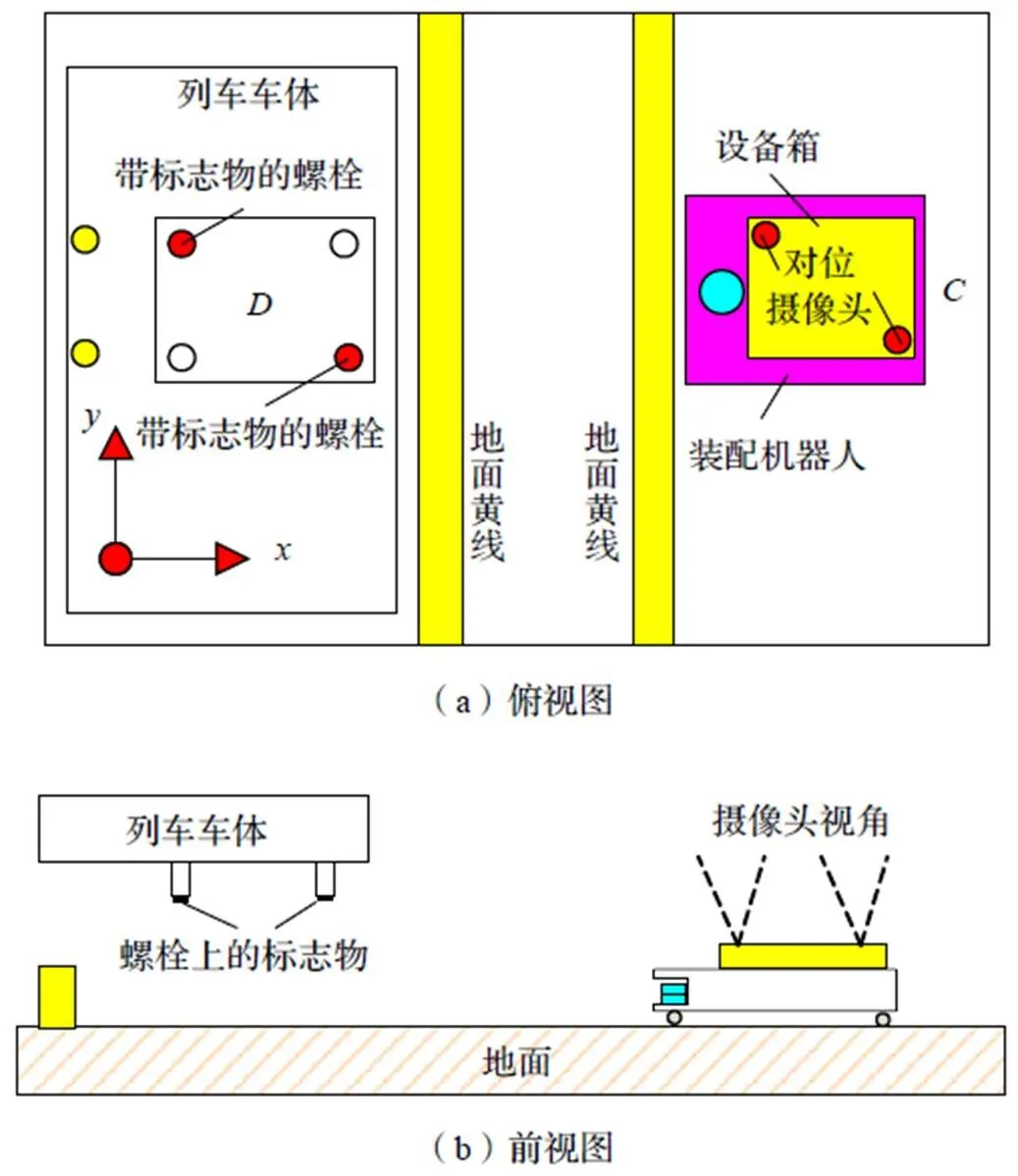
圖6 裝配機(jī)器人橫向定位原理圖
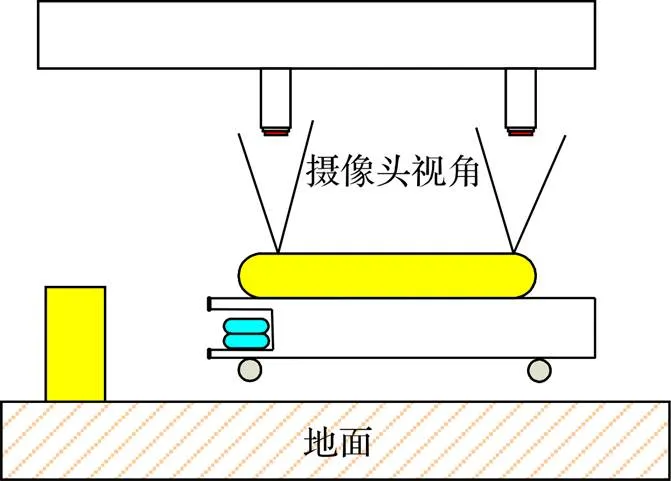
圖7 裝配機(jī)器人通過攝像頭進(jìn)行橫向定位原理圖
綜上所述,依靠電子羅盤、激光雷達(dá)和攝像頭可以完成機(jī)器人在安裝工位的定位。
2.3 第三級定位和導(dǎo)航
第三級定位和導(dǎo)航,在處(設(shè)備箱安裝工位)完成。通過攝像頭跟蹤螺栓上標(biāo)志物的位置,首先調(diào)整機(jī)器人移動底盤的姿態(tài),接著進(jìn)行四自由度運(yùn)動裝置的精密調(diào)節(jié),令設(shè)備箱的安裝孔與車輛底部的螺栓精確對中[14],最后完成設(shè)備箱的舉升。
如圖8所示設(shè)備箱的安裝孔向螺栓的左側(cè)有一定偏移量,如圖9所示設(shè)備箱向右移動,令安裝孔與對應(yīng)螺栓對中。如圖10所示為設(shè)備箱被抬升令螺栓插入設(shè)備箱安裝孔的過程,在此過程中滑塊頂住車體底部的安裝梁,并帶動定位套和攝像頭向下退出安裝孔。

圖8 設(shè)備箱對中裝置示意圖
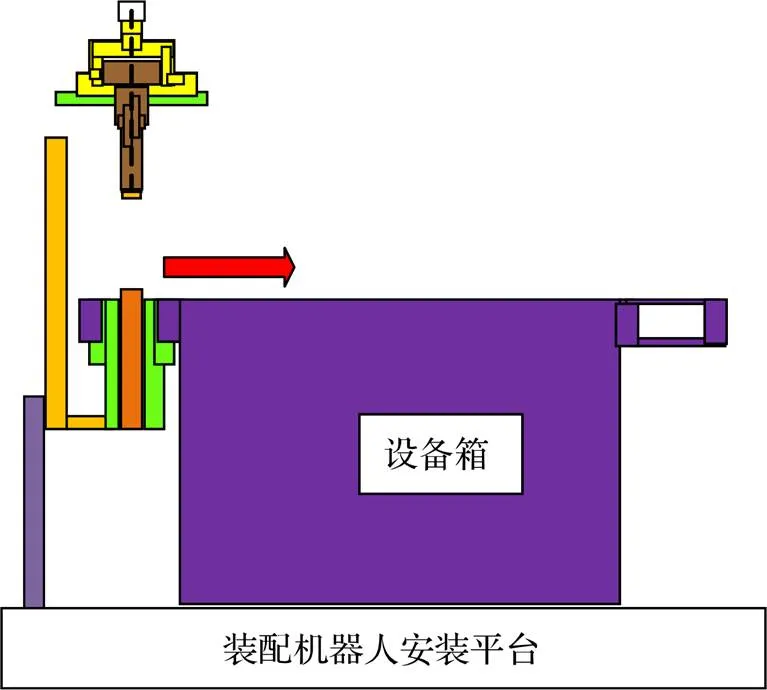
圖9 設(shè)備箱對中

圖10 設(shè)備箱抬升
3 控制系統(tǒng)
列車設(shè)備箱自動裝配機(jī)器人的控制系統(tǒng)如如11所示。
上位機(jī)(工控機(jī))和基于Qt、OpenCV和ROS開發(fā)的機(jī)器人操作系統(tǒng),監(jiān)控分析電子羅盤、光電導(dǎo)航傳感器、激光雷達(dá)和攝像頭的信號,同時與下位機(jī)通信,從而控制和檢測搬運(yùn)平臺的運(yùn)動狀態(tài),提供可視化界面為操作人員監(jiān)控設(shè)備箱自動裝配機(jī)器人提供方便[15]。
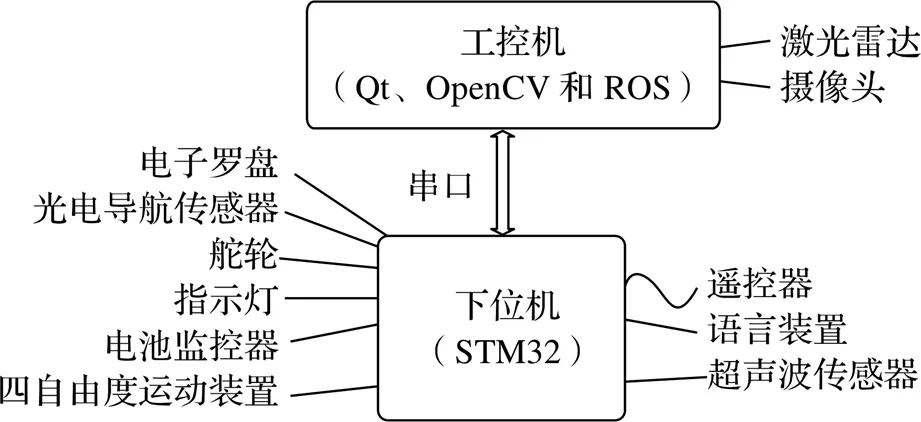
圖11 機(jī)器人控制系統(tǒng)
下位機(jī)可接收無線或有線遙控器的控制信號,當(dāng)遙控器向下位機(jī)發(fā)送運(yùn)動指令,下位機(jī)控制移動底盤的運(yùn)動和四自由度運(yùn)動裝置的動作。移動底盤和四自由度運(yùn)動裝置的運(yùn)動狀態(tài),如電池電量、裝配進(jìn)度、速度、轉(zhuǎn)彎半徑、抬升高度、四自由度運(yùn)動裝置的位移量和旋轉(zhuǎn)角度、設(shè)備箱安裝孔與螺栓的對位圖像等在遙控器中顯示。下位機(jī)也可以由上位機(jī)發(fā)送控制指令進(jìn)行控制(機(jī)器人處于自動運(yùn)動模式),下位機(jī)同時把運(yùn)動狀態(tài)信息傳送給上位機(jī),遙控器上有控制按鈕,可以在人工操控和機(jī)器人自動運(yùn)動兩種模式之間進(jìn)行轉(zhuǎn)換[16]。
4 結(jié)語
本文提出了一種列車設(shè)備箱智能裝配系統(tǒng)設(shè)計,系統(tǒng)能夠通過自主循跡方式運(yùn)動到車輛下方的設(shè)備箱安裝位置,采用攝像頭進(jìn)行圖像識別和定位,實(shí)現(xiàn)設(shè)備箱與安裝螺栓或安裝孔的自動對位。減少列車設(shè)備箱裝配所需人員數(shù)量,縮短裝配時間,實(shí)現(xiàn)裝配過程的自動化。
[1]“中國制造2025”重點(diǎn)發(fā)展10大領(lǐng)域[A]. 中國經(jīng)濟(jì)月報,2015(7)[C]. 中國經(jīng)濟(jì)改革研究基金會,2015:2.
[2]羅向陽,鮑官軍. 國內(nèi)高校機(jī)器人研究現(xiàn)狀分析[J]. 機(jī)械,2018,45(6):37-42.
[3]季旭全,王君臣,趙江地,等. 基于機(jī)器人與視覺引導(dǎo)的星載設(shè)備智能裝配方法[J]. 機(jī)械工程學(xué)報,2018,54(23):63-72.
[4]王福斌,王福平,陳至坤,等. 天車機(jī)器人設(shè)計[J].機(jī)床與液壓,2015,43(21):50-52,57.
[5]陳濤,李艷文. 基于S7-200控制的動車擋風(fēng)玻璃裝配機(jī)器人設(shè)計[J]. 制造業(yè)自動化,2015,37(18):37-41.
[6]游繼強(qiáng). GSK RB08工業(yè)機(jī)器人的視覺定位系統(tǒng)的設(shè)計與應(yīng)用[D]. 廣州:華南理工大學(xué),2016.
[7]李元鋒,李正生,王洋. CCD攝像頭圓目標(biāo)中心定位方法[J].應(yīng)用光學(xué),2010,31(6):956-960.
[8]王耀南,魏書寧,印峰,等. 輸電線路除冰機(jī)器人關(guān)鍵技術(shù)綜述[J]. 機(jī)械工程學(xué)報,2011,47(23):30-38.
[9]孟琦. 雙轉(zhuǎn)向架驅(qū)動自動導(dǎo)引車車載控制系統(tǒng)關(guān)鍵技術(shù)研究[D]. 北京:機(jī)械科學(xué)研究總院,2014.
[10]張曉鵬. 基于Stewart機(jī)構(gòu)的船載穩(wěn)定平臺的分析與設(shè)計[D]. 青島:中國海洋大學(xué),2013.
[11]許偉. 基于激光雷達(dá)環(huán)境信息處理的機(jī)器人定位/導(dǎo)航技術(shù)研究[D]. 南京:南京理工大學(xué),2006.
[12]肖灑,宋天中. 基于激光雷達(dá)的機(jī)器人定位與地圖構(gòu)建[J]. 農(nóng)業(yè)裝備與車輛工程,2019,57(2):49-53.
[13]張強(qiáng). 室內(nèi)移動機(jī)器人視覺導(dǎo)航方法研究[D]. 長沙:中南大學(xué),2013.
[14]許鵬. 基于視覺伺服機(jī)理的遙操作機(jī)器人虛擬力反饋控制研究[D]. 長春:吉林大學(xué),2014.
[15]熊艷. 移動機(jī)器人激光導(dǎo)航系統(tǒng)研究與實(shí)現(xiàn)[D]. 重慶:重慶郵電大學(xué),2016
[16]胡凡. 視覺定位裝配機(jī)器人的運(yùn)動控制系統(tǒng)設(shè)計[D]. 西安:陜西科技大學(xué),2017.
Design of Intelligent Assembly System for Train Equipment Box
YANG Zhicai1,LIN Qunxu1,WU Yueyu1,LIU Shengxiang1,ZHAI Yujiang1,ZHENG Jinrui2
(1.School of Railway Tracks and Transportation, Wuyi University,Jiangmen 529020, China; 2.CRRC Guangdong Rolling Stock Co., Ltd., Xinhui 529100, China)
At present, the assembly of train equipment box is generally carried out manually or semi- automatically, which requires more manpower and longer working cycle. In this paper, a study on the design of intelligent assembly system for train equipment box is conducted to solve the problems. First, the equipment box is placed on the robot, and the robot moves to the installation position of the equipment box under the vehicle by way of independent tracking. Then, the camera is used for image recognition and positioning, so that the installation hole of the equipment box is aligned with the bolt or assembly hole at the bottom of the vehicle, and lifted to the predetermined position. Finally, after the operator fastens the bolt of the equipment box, the robot moves from the installation position back to the preset position automatically to prepare for the assembly of other equipment boxes. It turns out that this system can significantly reduce the human cost and assembly time.
train equipment box;intelligent assembly;independent tracking
TP273
A
10.3969/j.issn.1006-0316.2020.03.006
1006-0316 (2020) 03-0031-06
2019-10-29
國家重點(diǎn)研發(fā)計劃(2018YFB1201601);國家自然基金(51307170);廣東省自然科學(xué)基金(2018A030310046);五邑大學(xué)青年科研基金(2016zk02);2019五邑大學(xué)學(xué)生創(chuàng)新創(chuàng)業(yè)項(xiàng)目(2019CX05,2019CX16,2019CX17);江門市基礎(chǔ)與理論科學(xué)研究類科技計劃項(xiàng)目(2016030100040006742)
楊智才(1993-),男,甘肅慶陽人,碩士研究生,主要研究方向?yàn)閳D像識別與定位技術(shù);林群煦(1983-),男,廣東江門人,博士,副教授,主要研究方向?yàn)橹悄芑b配、無人駕駛。
吳月玉(1995-),女,廣東湛江人,碩士研究生,主要研究方向?yàn)橄冗M(jìn)制造技術(shù)與裝備、圖像識別,E-mail:2919628580@qq.com
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00