城市環(huán)境下數(shù)據(jù)缺失定位算法比較
2020-04-13 08:46:56崔先強(qiáng)高天杭
導(dǎo)航定位學(xué)報(bào) 2020年2期
王 勛,崔先強(qiáng),高天杭
城市環(huán)境下數(shù)據(jù)缺失定位算法比較
王 勛,崔先強(qiáng),高天杭
(中南大學(xué) 地球科學(xué)與信息物理學(xué)院,長(zhǎng)沙 410083)
針對(duì)在城市峽谷、樹(shù)木茂盛、隧道等環(huán)境下進(jìn)行全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)動(dòng)態(tài)測(cè)量,容易因衛(wèi)星數(shù)量不足而造成常規(guī)的最小二乘定位算法無(wú)法完成定位解算的問(wèn)題,對(duì)現(xiàn)有的4種GNSS數(shù)據(jù)缺失定位算法進(jìn)行比較分析:介紹4種算法的基本原理,并分析其在實(shí)際應(yīng)用中的優(yōu)缺點(diǎn);然后使用實(shí)測(cè)數(shù)據(jù)對(duì)4種算法的性能進(jìn)行評(píng)估。結(jié)果表明:在3顆觀(guān)測(cè)衛(wèi)星的情況下,偽距預(yù)報(bào)算法在3個(gè)方向上的精度都要優(yōu)于其他3種算法;當(dāng)觀(guān)測(cè)衛(wèi)星數(shù)少于3顆時(shí),偽距預(yù)報(bào)和卡爾曼(Kalman)濾波算法的定位精度均會(huì)隨可見(jiàn)衛(wèi)星數(shù)的減少而降低,但偽距預(yù)報(bào)算法的定位精度始終優(yōu)于Kalman濾波算法。
動(dòng)態(tài)全球衛(wèi)星導(dǎo)航系統(tǒng);城市峽谷;偽距預(yù)報(bào);卡爾曼濾波;可靠性
0 引言
在城市環(huán)境中進(jìn)行動(dòng)態(tài)全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)測(cè)量時(shí),經(jīng)常會(huì)因?yàn)檎趽鯁?wèn)題而引起觀(guān)測(cè)數(shù)據(jù)的缺失,導(dǎo)致無(wú)法獲得連續(xù)的定位結(jié)果。如何在數(shù)據(jù)缺失條件下獲得連續(xù)、可靠的高精度GNSS導(dǎo)航定位服務(wù)一直都是研究的熱點(diǎn)。隨著GNSS的快速發(fā)展,各個(gè)定位系統(tǒng)不斷完善,并且衛(wèi)星的數(shù)目也越來(lái)越多,加上對(duì)GNSS系統(tǒng)兼容與互操作問(wèn)題的深入研究,使得多個(gè)定位系統(tǒng)進(jìn)行融合定位成為可能,可為用戶(hù)提供更高質(zhì)量的定位、導(dǎo)航、授時(shí)(positioning, navigation and time, PNT)服務(wù)[1-2]。多系統(tǒng)融合定位,在一定程度上能夠改善由于觀(guān)測(cè)衛(wèi)星數(shù)不足而引起的定位問(wèn)題,但是在遮擋較為嚴(yán)重的地方,數(shù)據(jù)質(zhì)量差、精度低,也會(huì)出現(xiàn)組合后的可見(jiàn)衛(wèi)星數(shù)不足的情況[3-6]。文獻(xiàn)[7]提出3星結(jié)合鐘差預(yù)報(bào)算法以及3星結(jié)合高程固定算法來(lái)解決城市中遇到的一些定位問(wèn)題,這2種方法可以提高城市定位的連續(xù)性,但是只能解決3顆觀(guān)測(cè)衛(wèi)星時(shí)的定位問(wèn)題,當(dāng)可見(jiàn)衛(wèi)星數(shù)少于3顆時(shí)則不適用。文獻(xiàn)[8]提出了偽距預(yù)報(bào)算法,該算法較好地解決了城市環(huán)境下的定位問(wèn)題,但計(jì)算量較大,且計(jì)算過(guò)程較為繁瑣。卡爾曼(Kalman)濾波算法通過(guò)物理機(jī)制來(lái)進(jìn)行狀態(tài)的更新,即使沒(méi)有觀(guān)測(cè)到衛(wèi)星,也可完成位置參數(shù)的求解[9-12]。以上方法都不需要增加額外的裝置,就可以改善因?yàn)閿?shù)據(jù)缺失而無(wú)法定位的情況,實(shí)用性較廣。
隨著慣性導(dǎo)航和組合導(dǎo)航技術(shù)的快速發(fā)展,很大程度上解決了觀(guān)測(cè)衛(wèi)星不足時(shí)遇到的定位問(wèn)題,它依據(jù)慣性力學(xué)的基本原理來(lái)進(jìn)行載體位置的更新,即使沒(méi)有觀(guān)測(cè)衛(wèi)星,也可獲得當(dāng)前歷元的定位結(jié)果[13-17]。文獻(xiàn)[18]提出用原子鐘和氣壓測(cè)高儀組合來(lái)輔助北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigationsatellite system, BDS)進(jìn)行定位,極大地提高了定位的連續(xù)性。隨著偽衛(wèi)星技術(shù)的發(fā)展,數(shù)據(jù)缺失情況下的定位問(wèn)題得到了解決,并且精度較高[19]。這些方法都在很大程度上解決了城市峽谷中定位遇到的問(wèn)題,但是它們需要增加額外的裝置來(lái)進(jìn)行輔助,從而提高了觀(guān)測(cè)成本和技術(shù)難度。
目前常用鐘差預(yù)報(bào)和高程固定算法來(lái)解決3顆觀(guān)測(cè)衛(wèi)星時(shí)的定位問(wèn)題,偽距預(yù)報(bào)和Kalman濾波算法可以解決觀(guān)測(cè)衛(wèi)星數(shù)不足4顆時(shí)的定位問(wèn)題,這幾種算法不需要增加額外的裝置就可以求解缺失歷元的位置參數(shù),進(jìn)而獲得連續(xù)的導(dǎo)航定位結(jié)果。但直到目前,仍未有學(xué)者對(duì)這4種數(shù)據(jù)缺失定位算法進(jìn)行對(duì)比分析。基于此,本文將針對(duì)不同的數(shù)據(jù)缺失情況,使用BDS實(shí)測(cè)數(shù)據(jù)來(lái)分析這4種數(shù)據(jù)缺失定位算法的性能。
1 數(shù)據(jù)缺失定位算法
1.1 鐘差預(yù)報(bào)
GNSS完成定位至少需要4顆觀(guān)測(cè)衛(wèi)星,當(dāng)觀(guān)測(cè)衛(wèi)星數(shù)降到3顆時(shí),常規(guī)的最小二乘定位算法將無(wú)法完成定位的解算,此時(shí)通過(guò)鐘差預(yù)報(bào)算法可以對(duì)當(dāng)前歷元的接收機(jī)鐘差進(jìn)行預(yù)報(bào),3顆衛(wèi)星的觀(guān)測(cè)方程結(jié)合預(yù)測(cè)得到的接收機(jī)鐘差,通過(guò)最小二乘解算就可以獲得唯一的定位解。現(xiàn)有的衛(wèi)星鐘差預(yù)報(bào)模型主要包括2階多項(xiàng)式和灰色模型[20-24],它們都能滿(mǎn)足導(dǎo)航定位的需求,但是GNSS廣播星歷中使用的是2階多項(xiàng)式模型,本文中也將使用2階多項(xiàng)式模型來(lái)預(yù)報(bào)缺失歷元的接收機(jī)鐘差,其模型[24]為

采用鐘差預(yù)報(bào)輔助3星定位,即將接收機(jī)鐘差當(dāng)做已知條件來(lái)進(jìn)行處理,這樣在采用最小二乘進(jìn)行參數(shù)估計(jì)時(shí),待估參數(shù)的個(gè)數(shù)將減少1個(gè),但該算法只能解決3顆觀(guān)測(cè)衛(wèi)星時(shí)的定位問(wèn)題。另外,對(duì)于導(dǎo)航型接收機(jī)來(lái)說(shuō),其內(nèi)部的石英鐘在短時(shí)間內(nèi),穩(wěn)定性較高,所以短時(shí)內(nèi)外推計(jì)算接收機(jī)鐘差精度較高,長(zhǎng)時(shí)間內(nèi)誤差會(huì)逐漸累積。同時(shí)影響接收機(jī)穩(wěn)定性因素很多,在一些數(shù)據(jù)質(zhì)量差,或者缺失嚴(yán)重的路段,采用鐘差預(yù)報(bào)算法,其誤差也會(huì)較大。
1.2 高程固定
在城市環(huán)境中進(jìn)行動(dòng)態(tài)定位,一般道路較為平坦,在一定精度要求的范圍內(nèi),可認(rèn)為載體的高程在短時(shí)內(nèi)不發(fā)生變化。當(dāng)僅有3顆觀(guān)測(cè)衛(wèi)星時(shí),最小二乘定位算法無(wú)法得到可靠的定位結(jié)果,利用高程固定算法,就可以在高程方向上增加1個(gè)等式約束,結(jié)合3顆觀(guān)測(cè)衛(wèi)星的觀(guān)測(cè)方程,就可以完成定位的解算。
高程固定算法和鐘差預(yù)報(bào)算法類(lèi)似,同樣每次只能提供1個(gè)輔助約束條件,僅能解決3顆觀(guān)測(cè)衛(wèi)星時(shí)的定位問(wèn)題,當(dāng)觀(guān)測(cè)衛(wèi)星數(shù)少于3顆時(shí),則不適用。高程固定算法通過(guò)設(shè)定短時(shí)間內(nèi)高程不變的來(lái)進(jìn)行輔助求解。在城市環(huán)境中,一般道路較為平坦,這時(shí)采用高程固定算法精度較高,但是對(duì)于地形起伏較大的地方采用此法時(shí),誤差將會(huì)變大。
1.3 偽距預(yù)報(bào)
由于衛(wèi)星的運(yùn)動(dòng)相對(duì)來(lái)說(shuō)比較規(guī)律,而且在短時(shí)間內(nèi)偽距的變化十分接近線(xiàn)性,在一定精度要求的范圍內(nèi),可以認(rèn)為在短時(shí)間內(nèi)偽距的變化率保持不變。因此,可以利用最新幾個(gè)歷元的觀(guān)測(cè)數(shù)據(jù)進(jìn)行建模,進(jìn)而求取當(dāng)前歷元的偽距變化率,根據(jù)偽距以及偽距的變化率,就可以對(duì)偽距觀(guān)測(cè)值進(jìn)行預(yù)報(bào),具體計(jì)算公式為

采用該方法時(shí),需要對(duì)數(shù)據(jù)進(jìn)行預(yù)處理,然后對(duì)缺失歷元的偽距觀(guān)測(cè)值進(jìn)行預(yù)報(bào)。為了提高偽距預(yù)報(bào)算法的精度,將采用移動(dòng)開(kāi)窗法,每次都使用最新幾個(gè)觀(guān)測(cè)歷元的偽距來(lái)進(jìn)行建模和預(yù)報(bào),并用最新歷元的各項(xiàng)誤差來(lái)代替缺失歷元的誤差,通過(guò)最小二乘定位算法進(jìn)行求解。該算法是利用前后歷元數(shù)據(jù)的強(qiáng)相關(guān)性來(lái)進(jìn)行偽距預(yù)報(bào),由于數(shù)據(jù)連續(xù)缺失的歷元一般為數(shù)個(gè),這樣采用最新歷元的觀(guān)測(cè)數(shù)據(jù)來(lái)進(jìn)行預(yù)報(bào),精度較高,但是對(duì)于數(shù)據(jù)連續(xù)缺失較多的情況,誤差也會(huì)逐漸累積。
1.4 Kalman濾波
標(biāo)準(zhǔn)Kalman濾波模型的動(dòng)力學(xué)模型和觀(guān)測(cè)模型[25]表示為

根據(jù)數(shù)據(jù)預(yù)處理的結(jié)果,判斷當(dāng)前歷元數(shù)據(jù)是否有缺失:若沒(méi)有數(shù)據(jù)缺失時(shí),則用最小二乘定位算法求解;若有缺失,則利用式(5)~式(10)進(jìn)行Kalman濾波處理,從而得到缺失歷元狀態(tài)參數(shù)。即



Kalman濾波是通過(guò)動(dòng)力學(xué)模型和觀(guān)測(cè)模型來(lái)對(duì)狀態(tài)進(jìn)行更新,即使沒(méi)有觀(guān)測(cè)到衛(wèi)星,也可以實(shí)現(xiàn)位置參數(shù)的求解。但它是1種最佳的線(xiàn)性濾波器,對(duì)于車(chē)輛的非線(xiàn)性運(yùn)動(dòng)來(lái)說(shuō),短時(shí)間內(nèi)精度很高,長(zhǎng)時(shí)間內(nèi)誤差則會(huì)快速累積。
2 實(shí)驗(yàn)與結(jié)果分析
本次實(shí)驗(yàn)采用Trimble netR9型接收機(jī),天線(xiàn)的型號(hào)為T(mén)RM55971.00,可同時(shí)接收BDS、全球定位系統(tǒng)(global positioning system,GPS)、格洛納斯衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system, GLONASS)及伽利略衛(wèi)星導(dǎo)航系統(tǒng)(Galileo navigation satellite system,Galileo)4個(gè)衛(wèi)星系統(tǒng)的數(shù)據(jù)。測(cè)量的路線(xiàn)如圖1所示。基準(zhǔn)站架設(shè)在中南大學(xué)校本部文法樓樓頂,基準(zhǔn)站的接收機(jī)和天線(xiàn)型號(hào)與流動(dòng)站的型號(hào)相同,采樣間隔都設(shè)置為1 s,測(cè)量車(chē)如圖2所示。本次實(shí)驗(yàn)主要分析BDS在城市環(huán)境中的定位性能,將GPS和BDS雙系統(tǒng)組合實(shí)時(shí)動(dòng)態(tài)載波相位差分(real time kinematic, RTK)解算的結(jié)果作為參考值,對(duì)BDS單系統(tǒng)解算的偽距單點(diǎn)定位解進(jìn)行比較分析。

圖1 測(cè)量路線(xiàn)

圖2 測(cè)量車(chē)
為了分析BDS系統(tǒng)在城市環(huán)境下的觀(guān)測(cè)數(shù)據(jù)缺失情況,對(duì)此次實(shí)驗(yàn)BDS可用衛(wèi)星數(shù)進(jìn)行統(tǒng)計(jì),根據(jù)圖3的統(tǒng)計(jì)結(jié)果可以發(fā)現(xiàn),前400個(gè)歷元數(shù)據(jù)缺失嚴(yán)重,這是因?yàn)樵摃r(shí)間段車(chē)輛在中南大學(xué)本部行駛,樹(shù)木較多,遮擋嚴(yán)重,導(dǎo)致數(shù)據(jù)缺失較多,之后在西、北二環(huán)路上行駛,視野開(kāi)闊,遮擋較少,觀(guān)測(cè)數(shù)據(jù)質(zhì)量較好,但也存在立交橋下行駛時(shí)數(shù)據(jù)缺失較嚴(yán)重的情況。

圖3 BDS衛(wèi)星數(shù)量
2.1 3星定位算法比較
對(duì)觀(guān)測(cè)數(shù)據(jù)進(jìn)行預(yù)處理,判斷可用衛(wèi)星數(shù)為3顆的歷元,采用4種算法進(jìn)行處理,并統(tǒng)計(jì)這4種算法在3個(gè)方向的誤差,如圖4所示。圖中的K、P、C、H分別代表Kalman濾波、偽距預(yù)報(bào)、鐘差預(yù)報(bào)、高程固定4種算法。計(jì)算結(jié)果如圖4和表1所示。
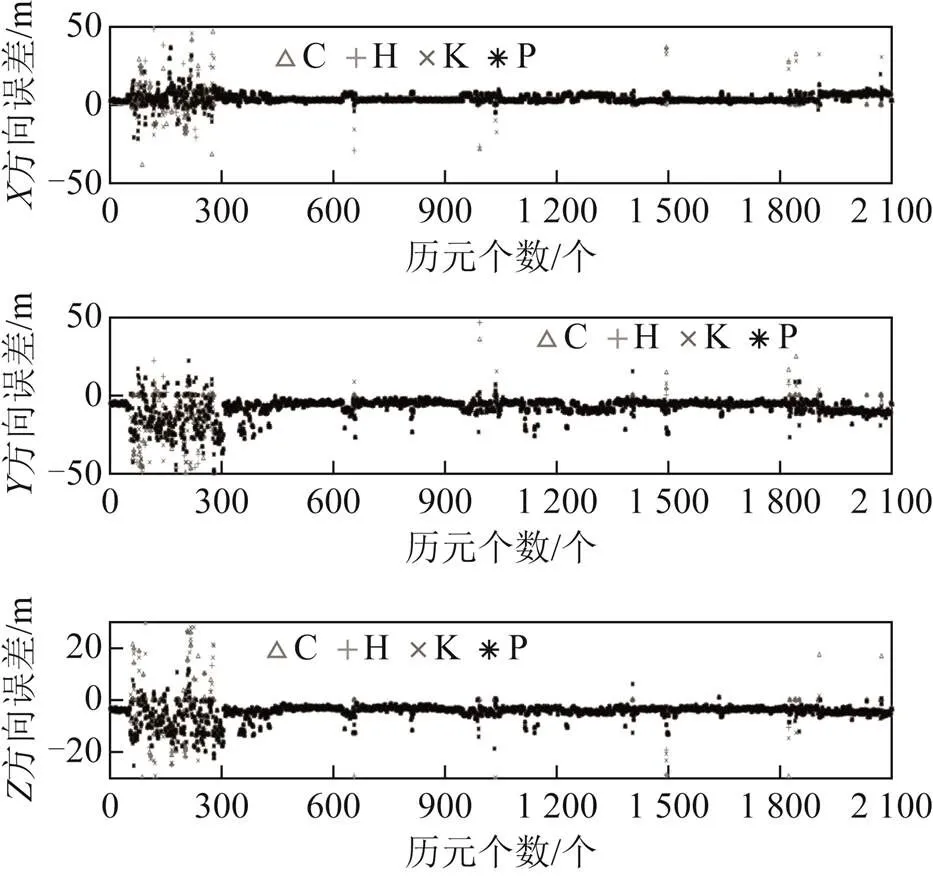
圖4 4種數(shù)據(jù)缺失定位算法誤差對(duì)比
由計(jì)算結(jié)果可以看出:
無(wú)論在全程路段還是缺失歷元情況下,偽距預(yù)報(bào)算法的精度最高,Kalman濾波算法次之,高程固定和鐘差預(yù)報(bào)算法精度相當(dāng)。由于接收機(jī)鐘差在數(shù)據(jù)缺失嚴(yán)重的地方,穩(wěn)定性較差,導(dǎo)致在進(jìn)行參數(shù)擬合時(shí),誤差較大,使得鐘差預(yù)報(bào)算法的定位精度較低。高程固定算法在道路平坦的情況下表現(xiàn)良好,但對(duì)于高程變化稍快的地方誤差很大。另一方面,當(dāng)僅有3顆觀(guān)測(cè)衛(wèi)星時(shí),如果衛(wèi)星的觀(guān)測(cè)質(zhì)量差,采用這2種方法則在進(jìn)行定位解算時(shí)沒(méi)有多余觀(guān)測(cè),在一定程度上導(dǎo)致了這2種算法精度的降低,即不具有抗干擾性。Kalman濾波則是根據(jù)物理機(jī)制來(lái)進(jìn)行載體位置的更新,它是1種最佳的線(xiàn)性濾波器,對(duì)于車(chē)輛的非線(xiàn)性運(yùn)動(dòng),在短時(shí)間內(nèi)精度較高,這也使得該方法的精度優(yōu)于高程固定和鐘差預(yù)報(bào)算法。偽距預(yù)報(bào)算法可以在觀(guān)測(cè)衛(wèi)星數(shù)不足時(shí)預(yù)測(cè)多顆衛(wèi)星的偽距觀(guān)測(cè)值,不僅在一定程度上改善了衛(wèi)星的幾何結(jié)構(gòu),而且還存在多余觀(guān)測(cè),在一定程度上減小了誤差,提升了精度,使得該方法的精度要優(yōu)于其他幾種方法。
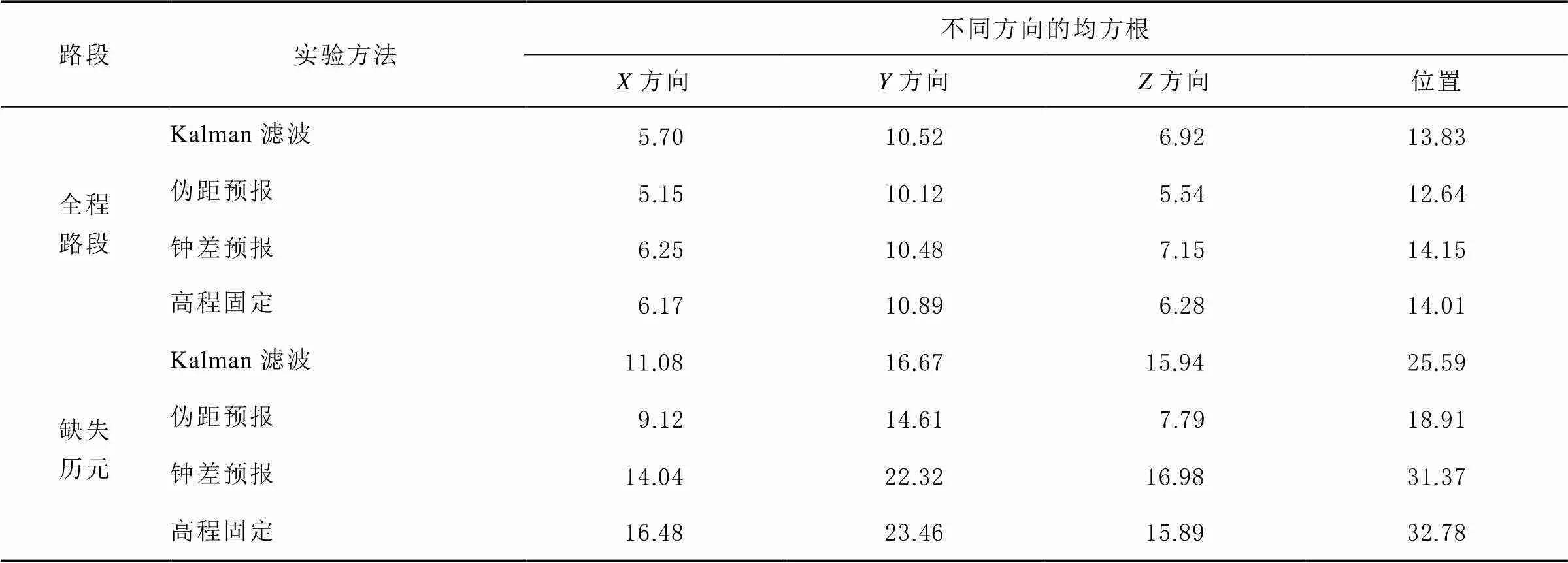
表1 4種數(shù)據(jù)缺失定位算法均方根統(tǒng)計(jì)表 m
2.2 其他情況
當(dāng)可見(jiàn)衛(wèi)星數(shù)低于3顆時(shí),鐘差預(yù)報(bào)和高程固定算法則不適用,而Kalman濾波和偽距預(yù)報(bào)算法則可以進(jìn)行載體位置的更新。為了分析這2種算法在該情況下的定位性能,分別在2顆、1顆及沒(méi)有觀(guān)測(cè)衛(wèi)星的情況下對(duì)2種算法進(jìn)行對(duì)比。
對(duì)全程路段處理結(jié)果的誤差進(jìn)行統(tǒng)計(jì),誤差曲線(xiàn)如圖5所示。從圖5中可以看出偽距預(yù)報(bào)算法的穩(wěn)定性要優(yōu)于Kalman濾波,在一些連續(xù)缺失的情況下,Kalman濾波算法的誤差出現(xiàn)了急劇增加的情況,偽距預(yù)報(bào)算法則較為平穩(wěn)。對(duì)比表1和表2全程路段的統(tǒng)計(jì)結(jié)果可以發(fā)現(xiàn):當(dāng)可見(jiàn)衛(wèi)星數(shù)依次從3顆降至0顆時(shí),2種算法的定位精度隨可見(jiàn)衛(wèi)星數(shù)的減少而降低;但不論在哪種數(shù)據(jù)缺失情況下,偽距預(yù)報(bào)算法在3個(gè)方向的精度都要高于Kalman濾波算法。

圖5 全程路段誤差曲線(xiàn)
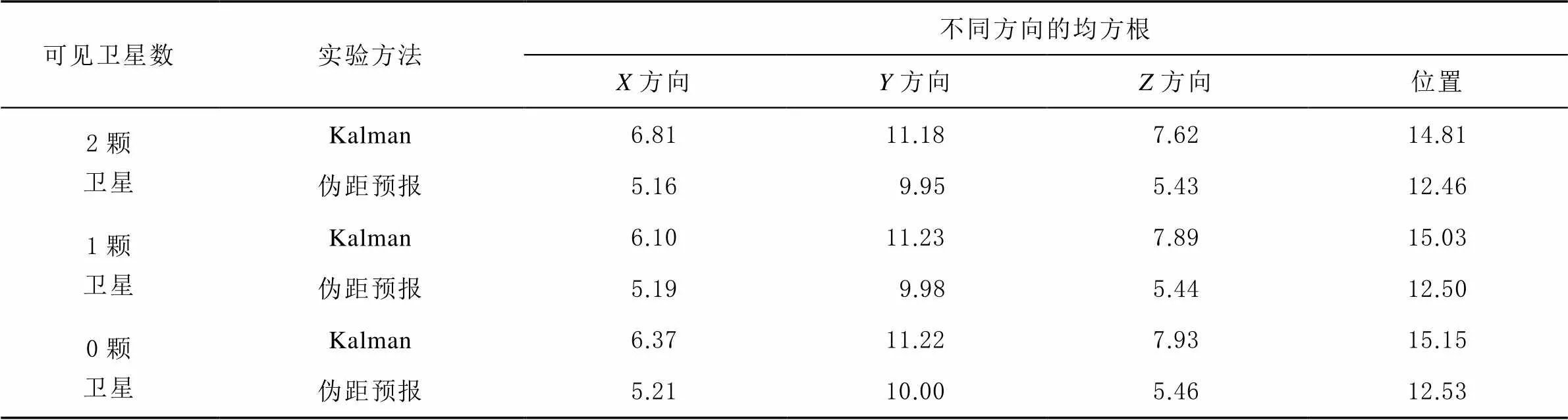
表2 全程路段誤差均方根統(tǒng)計(jì) m
對(duì)缺失歷元的誤差進(jìn)行統(tǒng)計(jì),統(tǒng)計(jì)結(jié)果如表3所示,對(duì)比表1和表3缺失歷元的統(tǒng)計(jì)結(jié)果可以發(fā)現(xiàn):當(dāng)可見(jiàn)衛(wèi)星數(shù)依次從3顆降至0顆時(shí),2種算法的定位精度隨可見(jiàn)衛(wèi)星數(shù)的減少而降低;但不論在哪種數(shù)據(jù)缺失情況下,偽距預(yù)報(bào)算法處理得到的定位精度都要優(yōu)于Kalman濾波。對(duì)比全程路段和缺失歷元的統(tǒng)計(jì)結(jié)果可以看出,當(dāng)觀(guān)測(cè)質(zhì)量較好沒(méi)有數(shù)據(jù)缺失時(shí),精度較高。

表3 缺失歷元誤差均方根統(tǒng)計(jì) m
3 結(jié)束語(yǔ)
在城市環(huán)境中進(jìn)行動(dòng)態(tài)定位,經(jīng)常會(huì)因?yàn)檎趽鯁?wèn)題引起觀(guān)測(cè)數(shù)據(jù)的缺失,導(dǎo)致無(wú)法獲得連續(xù)的導(dǎo)航定位結(jié)果。本文對(duì)目前常用的4種數(shù)據(jù)缺失定位算法在不同數(shù)據(jù)缺失情況下的定位性能進(jìn)行了對(duì)比分析,并使用BDS實(shí)測(cè)數(shù)據(jù)進(jìn)行驗(yàn)證。計(jì)算結(jié)果表明,在3顆觀(guān)測(cè)衛(wèi)星的情況下,偽距預(yù)報(bào)算法在3個(gè)方向上的精度都要優(yōu)于鐘差預(yù)報(bào)、高程固定和Kalman濾波;當(dāng)觀(guān)測(cè)衛(wèi)星數(shù)少于3顆時(shí),偽距預(yù)報(bào)和Kalman濾波算法的定位精度均隨可見(jiàn)衛(wèi)星數(shù)的減少而降低,但偽距預(yù)報(bào)算法定位精度較高。顯然,4種數(shù)據(jù)缺失定位算法中,偽距預(yù)報(bào)算法的精度最高、效果最好,它不僅提高了城市環(huán)境中定位的連續(xù)性,而且還改善了定位的精度和可靠性。但是,當(dāng)數(shù)據(jù)連續(xù)缺失的時(shí)間較長(zhǎng)時(shí),基于偽距預(yù)報(bào)的定位誤差也會(huì)逐漸累積。
[1]楊元喜, 陸明泉, 韓春好. GNSS互操作若干問(wèn)題[J]. 測(cè)繪學(xué)報(bào), 2016, 45(3): 253-259.
[2]楊元喜. 綜合PNT體系及其關(guān)鍵技術(shù)[J]. 測(cè)繪學(xué)報(bào), 2016, 45(5): 505-510.
[3]隋心, 李玉星, 沈佳琦, 等. 復(fù)雜環(huán)境下BDS/GPS緊組合高精度定位方法[J]. 導(dǎo)航定位學(xué)報(bào), 2019, 7(1): 83-87.
[4]王濤, 程鵬飛, 成英燕. GPS/GLONASS組合定位精度分析[J]. 導(dǎo)航定位學(xué)報(bào), 2017, 5(4): 113-118.
[5]王進(jìn), 楊元喜, 張勤, 等. 多模GNSS融合PPP系統(tǒng)間偏差特性分析[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版), 2019, 44(4): 475-481.
[6]栗廣才, 吳江飛, 劉衛(wèi)華, 等. GNSS多星座組合導(dǎo)航系統(tǒng)性能提升量化分析[J]. 大地測(cè)量與地球動(dòng)力學(xué), 2016. 36(5): 419-424.
[7]吳鵬. 基于高程和鐘差輔助的衛(wèi)星導(dǎo)航接收機(jī)定位技術(shù)研究[D]. 長(zhǎng)沙: 國(guó)防科學(xué)技術(shù)大學(xué), 2013.
[8]CHANG T H , WANG L S , CHANG F R . A solution to the Ill-conditioned GPS positioning problem in an urban environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 135-145.
[9]謝翔, 郭際明, 曹文濤, 等. 基于Kalman濾波算法衛(wèi)星數(shù)不足情況下的連續(xù)定位[J]. 地理空間信息, 2013, 11(1): 11-12.
[10]柯明星, 呂晶, 童凱翔, 等. 基于擴(kuò)展卡爾曼濾波的動(dòng)態(tài)協(xié)同定位算法[J]. 導(dǎo)航定位學(xué)報(bào), 2016, 4(1): 44-49.
[11]CUI Xianqiang, YANG Yuanxi. Adaptively robust filtering with classified adaptive factors[J]. Progress in Natural Science: Materials International, 2006, 16(8): 846-851.
[12]YANG Yuanxi, GAO Weiguang. A new learning statistic for adaptive filter based on predicted residuals[J]. Progress in Natural Science, 2006, 16(8): 833-837.
[13]于婷, 徐愛(ài)功, 付心如, 等. 一種自適應(yīng)卡爾曼濾波組合導(dǎo)航定位方法[J]. 導(dǎo)航定位學(xué)報(bào), 2017, 5(3): 101-104.
[14]龔琳琳, 張全, 牛小驥. 慣性導(dǎo)航算法的載體高動(dòng)態(tài)特性研究[J]. 導(dǎo)航定位學(xué)報(bào), 2015, 3(2): 71-75.
[15]郝雨時(shí), 徐愛(ài)功, 隋心, 等. 城市環(huán)境BDS/MEMS-IMU組合導(dǎo)航的模型誤差抑制方法[J]. 導(dǎo)航定位學(xué)報(bào), 2018, 6(3): 60-65.
[16]高為廣, 楊元喜, 崔先強(qiáng), 等. IMU/GPS組合導(dǎo)航系統(tǒng)自適應(yīng)Kalman濾波算法[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版), 2006. 10(5): 466-469.
[17]吳富梅, 楊元喜. 基于小波閾值消噪自適應(yīng)濾波的GPS/INS組合導(dǎo)航[J]. 測(cè)繪學(xué)報(bào), 2007, 36(2): 124-128.
[18]李博, 徐超, 李孝輝, 等. 遮擋環(huán)境下原子鐘和氣壓測(cè)高儀輔助北斗定位方法研究[J]. 電子信息學(xué)報(bào), 2018, 40(9): 2212-2218.
[19]趙娜, 趙偉, 孫妍, 等. 偽衛(wèi)星技術(shù)及其在導(dǎo)航定位中的應(yīng)用分析[J]. 導(dǎo)航定位學(xué)報(bào), 2014, 2(1): 82-86.
[20]曹士龍. 城市中GPS衛(wèi)星數(shù)不足四顆時(shí)定位技術(shù)研究[D]. 北京: 北京建筑工程學(xué)院, 2012.
[21]馬蕊, 呂晶, 胡相譽(yù), 等. 接收機(jī)鐘差模型構(gòu)建技術(shù)研究[J]. 通信技術(shù), 2017, 50(4): 622-629.
[22]劉濤, 于興旺. 高遮擋環(huán)境下衛(wèi)星數(shù)不足四顆的GPS定位研究[J]. 全球定位系統(tǒng), 2007, 32(5): 24-28.
[23]崔先強(qiáng), 焦文海. 灰色系統(tǒng)模型在衛(wèi)星鐘差預(yù)報(bào)中的應(yīng)用[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版), 2005, 30(5): 447-450.
[24]李征航, 黃勁松. GPS測(cè)量與數(shù)據(jù)處理[M]. 武漢: 武漢大學(xué)出版社, 2005: 40-43.
[25]楊元喜. 自適應(yīng)動(dòng)態(tài)導(dǎo)航定位[M]. 北京: 測(cè)繪出版社, 2017: 51-68.
Comparison of data missing positioning algorithms in urban environment
WANG Xun, CUI Xianqiang, GAO Tianhang
(School of Geosciences and Information Physics, Central South University, Changsha 410083, China)
Aiming at the problem that it is difficult to implement positioning solution for conventional least square positioning algorithm under the environment of urban canyons, dense trees, tunnels and so on in kinematic GNSS surveying, the paper comparatively analyzed the existing four GNSS positioning algorithms with inadequate satellite data: the principles of the algorithms were introduced, and the advantages and disadvantages of them in practical application were analyzed, then their performance were evaluated by measures. Result showed that: the pseudorange prediction algorithm would be superior to the other algorithms in three directions under the case of 3 visible satellites; and when the number of observed satellites is less than 3, the accuracy of pseudorange prediction and Kalman filtering algorithms would both decrease with the decrease of the number of visible satellites, while the positioning accuracy of pseudorange prediction algorithm would be always better than that of Kalman filtering algorithm.
kinematic global navigation satellite system (GNSS); urban canyon; pseudorange prediction; Kalman filtering; reliability
P228
A
2095-4999(2020)02-0043-06
王勛,崔先強(qiáng),高天杭. 城市環(huán)境下數(shù)據(jù)缺失定位算法比較[J]. 導(dǎo)航定位學(xué)報(bào), 2020, 8(2): 43-48.(WANG Xun, CUI Xianqiang, GAO Tianhang. Comparison of data missing positioning algorithms in urban environment[J]. Journal of Navigation and Positioning, 2020, 8(2): 43-48.)
10.16547/j.cnki.10-1096.20200208.
2019-07-18
國(guó)家自然科學(xué)基金項(xiàng)目(41674012)。
王勛(1993—),男,河南洛陽(yáng)人,碩士研究生,研究方向?yàn)槌鞘协h(huán)境下數(shù)據(jù)缺失定位算法。
崔先強(qiáng)(1975—),男, 湖北公安人,博士,講師,研究方向?yàn)閯?dòng)態(tài)導(dǎo)航定位數(shù)據(jù)處理及應(yīng)用。