瞬時無功理論在快速動態無功補償裝置中的應用研究
2020-04-13 02:19:48龔亮
工程技術研究 2020年1期
關鍵詞:分析
龔 亮
(中海石油深圳天然氣有限公司,廣東 深圳 518120)
在當今的配網系統設計中,晶閘管投切電容器,是一種常見的無功率補償裝置。這種裝置技術可以進行比較精準的信號檢測,提高無功分量制定的精確化程度,實現動態跟蹤性能,從而提高整個無功補償的效果。瞬時無功理論在現代化的裝置設計中,有著非常廣泛的應用。
1 瞬時無功理論
瞬時無功理論可以對三相電路的無功信號進行相關探測,并結合具體的檢測原理和分析仿真模型,搭建有效的仿真組件工具。通過這種瞬時無功判斷方式,可以對快速動態下運行的裝置進行無功補償信號檢測精準性研究,探討全面提高裝置運行的有效性。
1.1 晶閘管投切電容器電路結構
電容器在低壓動態無功裝置當中的基本結構,如圖1 所示。
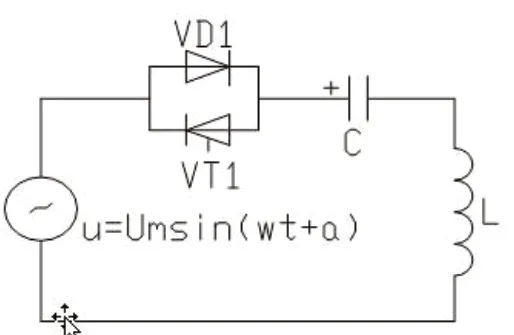
圖1 晶閘管投切電容器觸發電路結構
整個電路包含補償電容器、限流電抗器、反并聯晶閘管,以及相應的觸發裝置。電路中的雙向開關是一個關鍵的部件,它可以通過這種并聯的閘管裝置起到雙向配合的作用,能通過開通和關聯來實現整個電路支路的投退控制。一般來說,應用傳統的并聯補償裝置,不僅可以實現簡單的投切功能,前期運行成本也比較少,因此很多簡單的機械在設計時,都喜歡采用這種方式來進行功率的調節與控制。
1.2 控制精準度問題
傳統的補償方式無法精準地控制電容器具體運行,在投切過程時,可能會產生一些短暫的過渡時段,造成電壓超過負荷的現象,這不僅會影響整個功率裝置運行的可靠性與連續性,還會造成開關壽命的降低。
2 快速動態無功補償裝置
2.1 動態投切電容器
動態投切電容器主要采用晶閘管作為關鍵部件,來實現無功補償的控制能力。在設計過程中,晶閘管不僅比一般機械開關的使用壽命長,還在投切功能上的控制程度更高、安全可靠性更強,可以顯著提高整個管理的精細化水平,實現整個設備投切的“零失誤”。此外,可以大大減少系統中浪涌電流的產生,保障系統的安全。
將電容器并入組網中,可以減少設備運行對組網造成的沖擊;通過快速運行的方式,應用GDF-234 電容器對其運行電路進行仿真模擬;通過開關控制以及補償電容器的三相平衡方式,了解到不同電流仿真的具體結果。
2.2 仿真波形控制
在模擬機械開關的運行中,通過這種隨機性的判斷,對三相電流組件的具體運行波形進行仿真分析。尤其是在電容器并入組網中,對瞬間產生的浪涌電流進行模擬形態分析,通過電壓的跳變現象,探討晶閘管投切電容器的運行實際狀態。預先將電容器組器并進行充電控制,使得晶閘管的電壓和電流可以仿真配置,通過對于電流峰值的系統性分析,在時間等于0.006s 時,展現觸發裝置的控制效果,從而分析在時間為1/3、2/3 時系統的運行狀況,提高整個晶閘管電容器兩端電壓與電流的配合時刻一致性程度。通過這種仿真波形的相關涌動,判斷整個電路當中是否存在涌流現象。
3 瞬時無功理論在快速動態無功補償裝置中的具體應用
通過上述的流程控制可以看出,晶閘管投切電容器的應用可以減少整個浪涌電流在電網中存在的現象,通過“零投切”等相關的三項電壓控制方式,減少整個電流的過渡端現象,提高整個投切響應的反應速度。應用這種先進的無功率檢測方法,可以實現對于整流電路的模擬信號控制。
3.1 缺陷分析
這種晶閘管投切電容器組的設計也并不是完美的。采用這種投切方式,電網中依舊會存在一些諧波成分,如果不對這些成分進行過濾,就可能影響整個晶閘管控制裝置反應的快速性。如果不對這些諧波成分進行控制,可能會造成整個電流、電壓分析的檢測誤差大于實際設備的運行誤差。因此,在設計升級的過程中,還要應用瞬時無功理論的檢測辦法,通過算法的優化,不斷提高整個系統的動態響應能力。
3.2 三相電路瞬時無功理論
瞬時無功理論與三相電路的結合應用,主要是分析瞬時實際時功率以及瞬時虛功率。應用這種兩項交變電流,對于瞬時電壓和瞬時電流進行差異化的分析。通過建立一個模型矩陣,對不同的電流矢量進行轉化與合成,以及旋轉電流矢量進行相關的死角控制。在這個過程中,擬合是最基本的預測方法,matlab 中提供了polyfit/fit函數。
用法示例:
x=[1.0,1.5,2.0,2.5,3.0]' ;y=[0.9,1.7,2.2,2.6,3.0]';a=polyfit(x,y,1)%。對x、y 進行1 階擬合,返回y=ax+b 的兩個系數xi=1:0.1:3;yi=polyval(a,xi)%;將xi 帶入y=ax+b 得到yiplot(x,y,'o',xi,yi)。
計算得出統計之后的電流運算數值:
p=fittype('a×x+b×sin(x)+c')%,以ax+bsin(x)+c 形式擬合f=fit(x,y,p)%,求出a、b、c 系數。
3.3 判斷電流的通入狀態
判斷瞬時無功功率在三相電路中的電流狀態,可通過電壓的緩釋分析模型,建立起無功電流矩陣,并通過功率矩陣的相關組合與并注,對于三相電流的瞬時無功進行探討,分析不同電流中存在的諧波現象,以及無功功率電流的差異化法則進行運作。指令矩陣如下。

該種運算方法是通過把控整個三相電流運行的原理,進行相關的濾波器放置,并且通過節點選擇與位置判斷方法,對電網電壓波形的無畸變狀態進行優化判斷與分析。在整個網絡通路中,對基波運行功能以及電壓判斷狀態進行協調化反應,可以計算出整個檢測電流的基波分量情況。
3.4 仿真模型建設
采用晶閘管控制投切器可以實現整個無功率補償器的仿真模型搭建,通過這種三項互補的方式,可對不相容的相關功率容量進行差異化的分析。一般來說,目前常用的判斷標準為k2、k4 這幾種容量的不同組合方式,可以實現容量投入的切入點配合,從而通過組合定制的相關分析,確定每一種組合量的具體投切情況,判斷定值無功率量的實際運行效率,分析實際缺額在于10 ~15k 之間的運行實際結果。
3.5 時間控制模型分析
在時間等于0.06s 時,投入晶閘管控制投切模型進行仿真波形的模擬,對被補償之后三相電流的電壓電流運行情況,進行相關的無功缺額波形分析。通過這種優化擬合對比,運用位置判斷器進行補償前后的波形差異分析,尤其是通過晶閘補償控制裝置的具體運行,對過度反應數據以及電容器組的正常運行數值進行比對,判斷在何種情況下功率因數會明顯提高。
如公式(2)所示,當運營的約束條件xk1t1等于0,或xk2t2等于1 時,T1t2分別代表不可投入晶閘管控制投切模型的運營時段。也就意味著,如果在這一時段安排運營資源,那么資源的有效利用率將達不到原本的人力需求約束條件以及物力需求約束條件。在公式(2)中,k2 表示路線k 在最佳投切時段的運營狀態,用于描述該線路運行過程中,用電信息采集需要的最大資源量。系統可以通過該數據的優化把控對于整個線路運營的調整,需要的最大人力資源數量以及最大物力資源數量進行系統計算,從而建立整個信息分析模型的上限。

3.6 無功率缺額分析
從上述對比分析可以看出,投入晶閘管無功率差別補償設置之后,整個電網系統的無功率缺額從76k 下降到6k,實現整個無功缺額的補償功能。顯著降低諧波對于整個系統的影響,從而全面提高晶閘管投切控制裝置運行的精準化程度,避免錯誤的數據以及檢測誤差,對系統運行的穩定性與連續性造成負面影響。
在現代化的網絡結構調整中,技術人員還要應用人工智能的學習方式,對于這種瞬時無功補償理論,進行方式方法上面的拓展。尤其是建立矩陣模型、無功率檢測分析,以及遺傳粒子群算法,對動態運行狀態下的晶閘管投切控制模型進行連續動作的判斷;還要在動態補償的情況下,分析無功率補償理論的具體應用范圍,探求系統無功缺額,是否滿足目前的運行效率。電網管理人員要通過數據庫系統的建設等,不斷提高瞬時無功理論在整個組網建設當中運行的有效性。
4 結束語
綜上所述,瞬時無功率理論在目前的電網組建中有著非常廣泛的應用,通過這種快速動態無功補償裝置的升級,能夠提高整個裝置運行的精準化程度。從本文的分析可知,研究瞬時無功理論在快速動態無功補償裝置的應用,有利于人們從問題的角度了解目前裝置設計與優化的不足。對此,還應不斷加強系統性研究,進行差異化的設計與分析,以提高無功率補償裝置的優化程度。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06