基于WiFi技術的智能搜救機器人
2020-04-20 10:48:00馬喆馬小帆馬銀祥王飛洋李泓漩
鋒繪 2020年1期
馬喆 馬小帆 馬銀祥 王飛洋 李泓漩
摘 要:由于近幾年自然災害頻頻發生。本文就利用ARM Cortex內核單片機、電機驅動、WiFi模塊,攝像頭和舵機等諸多模塊制作了基于WiFi技術的智能搜救機器人,此機器人以STM32單片機為主控芯片控制電機驅動和舵機進行機器人的正常行走便于前往一些狹小的、危險的地方進行勘察和一些食物的補給,以及控制WiFi模塊和攝像頭讓營救人員可以通過手機控制機器人的行走方向和行走速度并且將一些重要的圖像傳送至營救人員的手機幫助營救人員及時確定被困人員的位置為營救人員爭取更多的時間和安全性。
關鍵詞:STM32;攝像頭;WiFi;環境監測;人員搜救
近年來地震、泥石流等自然災害頻發為人們的生命財產帶來了極大的生命財產威脅,災后搶險救援工作更是因為現場作業環境復雜、通訊中斷等問題變得極為困難。通過WiFi網絡控制的機器人能夠有效彌補傳統機器人的操控局限性,也可以實現實時視頻圖像傳輸以及機器人攜帶傳感器的相關信息采集,更能夠是機器人的控制端便捷化,多樣化。
1 系統整體設計
該機器人是以STM32單片機、WiFi模塊、電源模塊、電機驅動模塊、攝像頭模塊,溫濕度傳感器,直流電機和舵機等構成,總體控制過程是通過手機向WiFi模塊發送信號WiFi模塊接收到信號傳給單片機系統,單片機系統處理信號并傳送信號給電機驅動模塊進而控制電機轉動和舵機的運動,攝像頭模塊將拍攝到的畫面通過WiFi模塊傳送到手機方便營救人員勘察被困人員周圍的狀況并通過溫濕度傳感器測得被困人員周圍的溫度與濕度方便營救人員判斷被困人員急需的物品用機器人身上的機械臂將所需物品送給被困人員這樣將達到此機器人所研究制作的目的。
2 硬件設計
(1)采用WiFi控制模塊和手機終端進行連接,操作簡單。
(2)體積小,采用雙履帶式底盤,履帶具有很強的附著能力,可適應各種地形的特性,便于進行實時搜救工作。
(3)采用無線通信技術傳輸信息,傳遞效率高,可以實行各種復雜情況的及時通信。
(4)采用視頻攝像頭可以實現狹小地形的圖像,視頻傳輸,方便坍塌部分的空隙間的圖像傳輸,有利于救援的進行。
(5)采用機械臂,可以使機器人攜帶水和食物進入坍塌區域,滿足被困人員基本的需求,為救援延長了時間,增加被困人員的存活幾率。
(6)溫濕度傳感器,適應能力強,易于獲得較為集中的數據,可以用于測區被困人員周圍的溫度和濕度,有利于對被困人員進行及時有效的搶救。
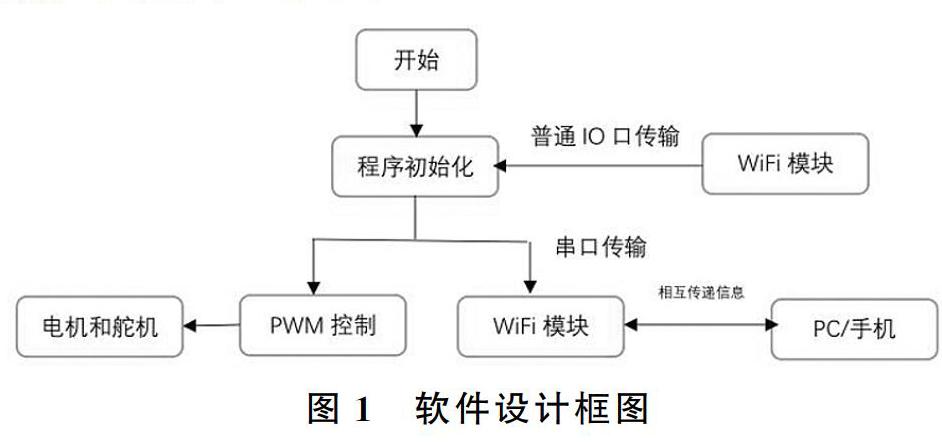
3 軟件設計
程序采用模塊化編程的方法使得整個程序布局清晰可見,軟件采用傳統的keil5編程軟件,主要程序設計就是單片機控制電機和舵機轉動并且實現單片機系統與WiFi控制模塊之間的信息交換。
本文使用PWM來控制電機和舵機的轉動,使得電機和舵機的轉速和轉向都是程序可以控制的,單片機與WiFi模塊之間通過串口進行信息傳輸,串口相對于其他通信方式簡單明了傳輸信息更加可靠,其他模塊可通過與單片機的IO口相連接來給單片機傳輸一些信息,這樣就可完成搜救機器人的軟件編寫。具體執行框圖如圖1所示。
5 結束語
由國內外地震救援的經驗來看,救援的快速性決定了救援工作的成敗。被救援人員越快受救,生還的幾率也就越大。在救援工作開展過程中,時間=生命,所以我們的機器人有很好的實用價值。綜合當代比較先進的攝像頭拍攝技術和WiFi控制技術,同時還在傳統的傳動機構上進行了改進。通過運用產品創新技術的模塊化建模的理論知識,成功為本產品的制作提供了理論依據。本產品應用前景好,制作比較簡便,有很大的研究價值。
參考文獻
[1]韋巍,何衍.智能控制基礎[M].北京:清華大學出版社,2008.
