基于多目標規劃的無人機路徑規劃
2020-04-20 11:32:44趙梵喆林躍楊永琪
價值工程 2020年9期
趙梵喆 林躍 楊永琪


摘要:本文以2017年波多黎各颶風為背景,基于多目標規劃對投放物資的無人機進行路徑規劃,充分利用GIS的數據以及引入dev準則,合理地優化無人機調度問題。
Abstract: This paper takes the 2017 puerto rico hurricane as the background, based on multi-objective planning, carries on the path planning to the unmanned aerial vehicle that puts in the material, makes full use of the GIS data and introduces the dev criterion, and reasonably optimizes the uav scheduling problem.
關鍵詞:多目標規劃;GIS;dev準則
Key words: multi-objective planning;GIS;dev criterion
中圖分類號:V279+.2? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2020)09-0208-03
1? 問題重述
隨著社會的發展和經濟的進步,無人機的發展逐步趨于成熟。無人機的應用有不同的場景和方式,例如,應用于軍事勘探和追蹤,農藥的無人噴灑,民用影像航拍等。以2017年發生颶風的波多黎各為例,利用最合理的方法向該地投放物資。
2? 問題分析
由于位置和無人機路徑規劃的不確定性,基于機會理論引入了不確定的隨機變量,然后提出了不確定的隨機多目標規劃問題。介紹了不確定隨機變量的排序關系,利用變量之間的排序關系將不確定的隨機多目標規劃問題轉化為不確定的隨機單目標規劃問題。[3]方差準則將不確定的隨機單目標規劃問題轉換為確定性的單目標規劃問題,利用改進的基于GIS的多準則決策模型對區域空間布局進行優化。首先,GIS具有強大的功能,如空間數據管理,數據處理,模型建立和操作,空間表達等。[1]尤其是它可以將醫院布局的影響因素與復雜的空間關聯性進行整合。其次,多準則決策分析模型可以考慮影響位置優化的主要因素,并以多準則的形式表達位置因素。
3? 模型假設
確定了新醫院布局的標準。
①距居民區的距離;②居住區人口密度;③與現有醫院的距離和現有醫院的規模;④距主要道路的距離;⑤設施必須位于城市規劃用地上。
4? 模型建立與求解
無人機任務分配模型主要考慮三個決策目標,即時間,路徑和有效載荷。可以將其設置為不確定空間(τ,L,M)中的不確定變量,并記錄為ε1,ε2。總之,給出了具體的無人機任務分配模型。
當時間目標函數以50km/h的速度飛行時,它會受到路徑和負載的極大影響。當以60km/h的速度飛行時,它會受到路徑的極大影響。
決策者對無人機任務中的每個目標功能有不同的偏好,并因此賦予不同的權重。因此,可以建立不確定的隨機單目標規劃模型。
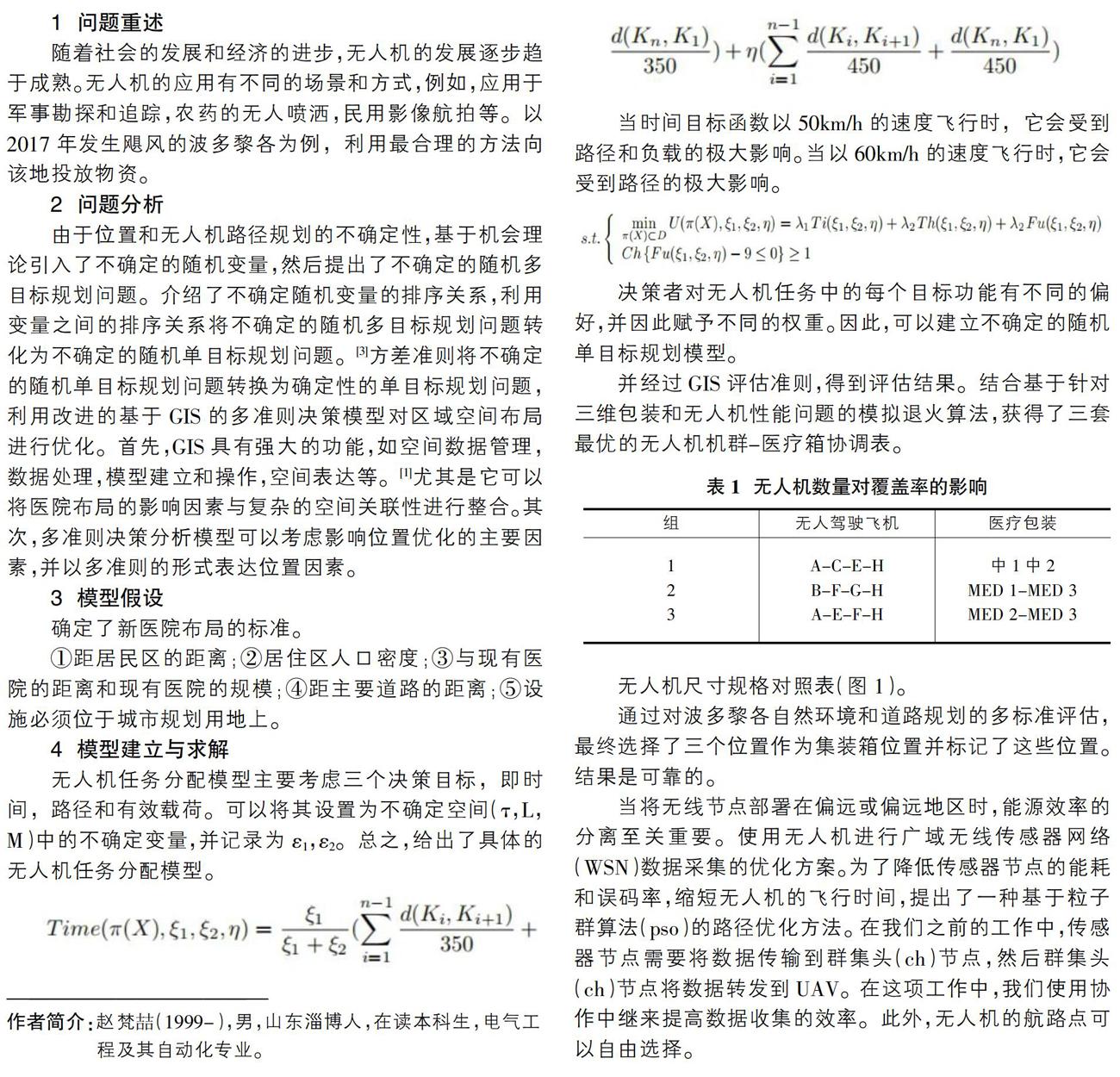
并經過GIS評估準則,得到評估結果。結合基于針對三維包裝和無人機性能問題的模擬退火算法,獲得了三套最優的無人機機群-醫療箱協調表。
無人機尺寸規格對照表(圖1)。
通過對波多黎各自然環境和道路規劃的多標準評估,最終選擇了三個位置作為集裝箱位置并標記了這些位置。結果是可靠的。
當將無線節點部署在偏遠或偏遠地區時,能源效率的分離至關重要。使用無人機進行廣域無線傳感器網絡(WSN)數據采集的優化方案。為了降低傳感器節點的能耗和誤碼率,縮短無人機的飛行時間,提出了一種基于粒子群算法(pso)的路徑優化方法。在我們之前的工作中,傳感器節點需要將數據傳輸到群集頭(ch)節點,然后群集頭(ch)節點將數據轉發到UAV。在這項工作中,我們使用協作中繼來提高數據收集的效率。此外,無人機的航路點可以自由選擇。
數值結果表明,兩條路線之間的性能差距隨著路線點數量的增加而增大,這有利于新策略的實施。另外,根據傳感器網絡的區域和傳感器節點的密度,描述了無人機的最佳路由點。這些貢獻最大程度地延長了網絡壽命和通信質量,同時最大限度地減少了無人機飛行時間。(表2)
通過無人機有效載荷和醫院位置的路徑規劃,經過計算得出調度表表3。
經過以上分析,得出基于GIS地圖的無人機飛行計劃的主要投放點。(圖2)
5? 模型評價與改進
充分利用GIS強大的數據管理,分析和可視化顯示功能,并通過引入Pev準則,將不確定的隨機單目標規劃問題轉化為原始問題的有效解決方案。但是 該模型是基于許多假設的理想情況,實際情況要復雜得多。同時隨著實例大小的增加,將生成更多的搜索樹,并且可能需要更多的計算時間。改模型需要進行改進有兩處, 考慮廣泛的影響因素,尤其是經濟和文化因素。智能優化算法模型用于更精確地研究布局優化的位置,以及 擴大研究范圍并驗證模型的泛化。
6? 總結
緊急和救災中的無人機調度優化和路線優化問題被轉換為多行銷業務員問題。對要巡邏的區域進行路線規劃。通過利用最低點上方最寬搜索區域的特征并結合網格劃分,將覆蓋巡邏表面更改為有效巡邏點,從而使路線的遮擋率更小。將無人機的巡邏問題轉化為經典的VRP問題來解決。通過引入PEV準則, 將不確定的隨機單目標規劃問題轉化為確定的單目標規劃問題,并證明所獲得的最優解是有效的解決方案。[2]在對GIS進行空間分析和多準則決策模型的基礎上,將選址的影響因素分解為決策準則,并推廣到GIS中。通過GIS工具的緩沖分析和覆蓋分析,實現了模型的空間表達。從位置優化的適用性的角度出發, 形成了適合布局優化的區域分層分布圖,可以為決策者提供參考。
參考文獻:
[1]孫贇,王瑛,李超.基于P_(EV)準則的不確定隨機多目標規劃問題求解[J].南京航空航天大學學報,2018,50(05):645-652.
[2]孟祥飛,王瑛,亓堯,呂茂隆,李超.基于P_(EV)準則的I-UMOP問題求解方法[J].系統工程與電子技術,2018,40(02):338-345.
[3]左華.模糊多目標規劃解的研究[D].華北電力大學,2013.
作者簡介:趙梵喆(1999-),男,山東淄博人,在讀本科生,電氣工程及其自動化專業。