混合動力挖掘機電動回轉系統速度控制研究*
2020-04-24 01:26:20韓素賢時盛志
機電工程 2020年4期
韓素賢,姚 洪,時盛志
(1.包頭職業技術學院 電氣工程系,內蒙古 包頭 014030;2.杭州西湖新能源科技有限公司,浙江 杭州 310012;3.寧夏和寧化學有限公司,寧夏 銀川 751400)
0 引 言
近年來,隨著全球氣候變暖、環境惡化等問題日益嚴重,各行各業都對產品在節能減排方面提出了嚴苛要求。工程機械在能耗和排放方面的問題尤為突出,尤其是液壓挖掘機,其工況復雜、載荷波動劇烈,從而導致油耗高、排放差等問題。因此,各大工程機械生產商和研究機構提出了混合動力類型的挖掘機[1-3]。例如,日本KOMATSU公司已經研發出了混合動力液壓挖掘機[4]。
混合動力挖掘機采用發動機和電動機兩種動力源并行驅動液壓泵,雖然液壓泵載荷波動劇烈,但電動機對液壓泵負載進行“削峰填谷”式的補償,使得發動機工作點運行平穩,并且始終處于高效區,因此具有一定的節能效果。此外,混合動力系統以超級電容為輔助動力源,因此采用電機替代液壓馬達來驅動回轉平臺成為另一可行的節能方案。因為電機驅動的效率比閥控馬達系統傳動效率高,而且在轉臺減速時可以通過電機制動使轉臺動能得以回饋,混合動力挖掘機轉臺回轉采用電機驅動方案能進一步提高系統效率[5-6]。
挖掘機作業時,回轉動作頻繁,起制動時間短,單次回轉作業時間只有幾秒,因此,電驅動回轉系統必須滿足速度控制響應快、超調量小以及運行平穩的要求。但是轉臺的轉動慣量隨挖掘機姿態不同以及鏟斗中物料量的多少而大范圍變化;此外,在斜坡作業時,轉臺重力在斜坡上的分量產生的干擾扭矩大,這些因素易造成回轉速度波動,不利于保證回轉的操控性和舒適性。
挖掘機電機驅動回轉系統的文獻報道較少,文獻[7-9]對電機驅動回轉系統設計、建模和參數選擇方面作了介紹。但挖掘機電動回轉系統的本質是變參數、強干擾的電機速度控制問題,這方面的研究報道較多。JIN K[10]采用了滑模控制方案來解決了挖掘機回轉系統變參數引起的轉速振動的問題;陸豪[11]采用了u綜合魯棒控制方法來解決電機驅動大慣量低剛度負載的位置控制問題;針對三軸飛行仿真轉臺模型參數變化、外部擾動和摩擦非線性的問題,王衛紅[12]提出了前饋控制+自適應增益調整的方法,實現了高精度轉速控制;YAO B[13]提出了非線性自適應魯棒控制算法來解決直線電機精密運動控制中變參數、非線性摩擦力、未建模動態和飽和非線性等問題。以上文獻中的控制策略都能很好地解決電機驅動系統的大慣量、變參數和強擾動問題,但需要大量計算,對控制器硬件的性能要求較高。
筆者在文獻[14]中給出了電機驅動回轉系統的結構和控制框架,并對系統的節能效果作了評價,但是速度控制僅采用了PI調節器,并未作深入研究。
本文針對變參數、強干擾速度問題,提出基于擾動觀測器(DOB)的控制策略,并且該算法計算簡單,適合在挖掘機普通性能控制器上實現。
1 系統結構
電機驅動回轉系統由回轉平臺、目標轉速信號單元、電機控制單元、制動單元、系統監控單元組成,如圖1所示。
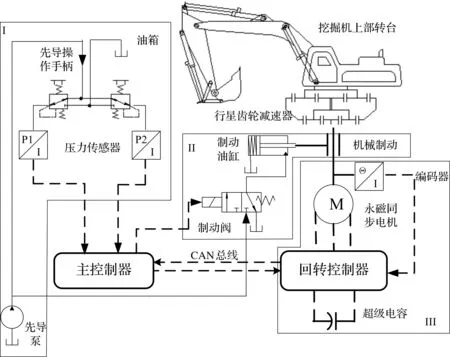
圖1 混合動力挖掘機回轉系統結構圖
回轉平臺由永磁同步電機通過行星減速器直接驅動;制動單元包括制動油缸、電磁閥和制動器,制動單元的作用是在轉臺停止旋轉時,鎖住轉臺以防受到外界干擾力矩的作用而自由旋轉,從而造成危險。目標轉速信號單元包括壓力傳感器、操作手柄、齒輪泵及液壓油箱,壓力傳感器安裝在操作手柄先導閥的出口處,檢測先導壓力并由控制器轉換成對應的電機目標轉速,用于轉臺速度控制。電機控制單元包括永磁同步電機及控制器、編碼器和超級電容,超級電容通過電機控制器連接到永磁同步電機,電機驅動轉臺旋轉時,工作在電動模式,由超級電容向電機供電;當轉臺減速或制動時,電機工作在發電模式,把轉臺動能轉化為電能向超級電容充電。系統監控單元主要是通過CAN總線網絡把主控制器、電機控制器和超級電容單元連接起來,以實現系統參數的監測與控制。
2 系統建模
2.1 轉臺
(1)
式中:TD—減速器輸出扭矩;B—阻尼比;J—回轉部分的等效慣量,文獻[15]通過試驗測試所得電機側等效慣量變化范圍0.8 kgm2~2.2 kgm2;dω/dt—轉臺的加速度;Tf—轉臺傳動系統所受的等效摩擦阻力矩;Tg—干擾力矩,包括轉臺在斜坡上,由重力產生的干擾力矩和鏟斗與外部環境作用產生的力矩。
2.2 減速器
TD=i·TE
(2)
式中:TE—電機輸出軸上的驅動轉矩;i—減速器傳動比。
2.3 電機
永磁同步電機采用矢量控制方式,電機扭矩控制系統結構如圖2所示。
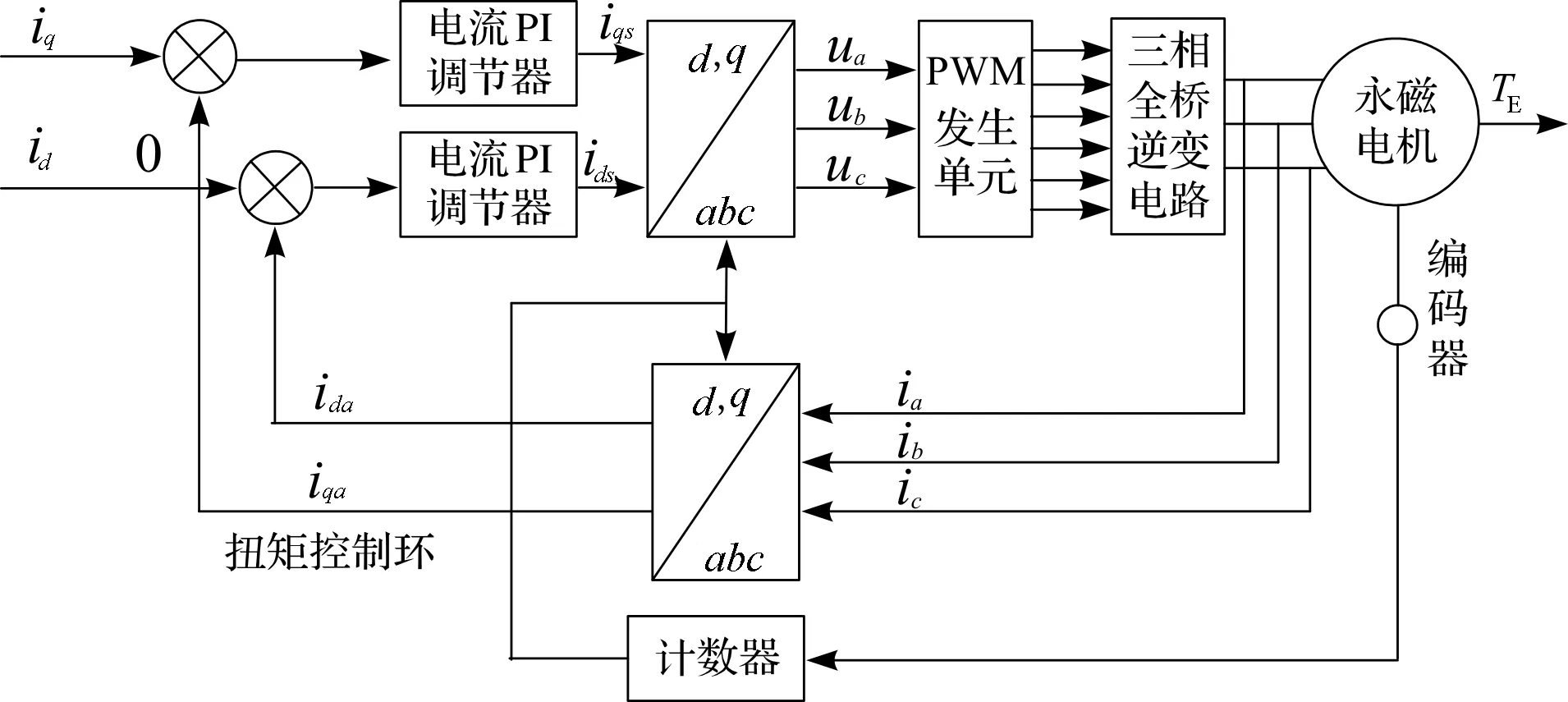
圖2 永磁同步電機扭矩控制系統結構圖
該系統實時檢測三相電流ia、ib和ic,經Clark變換將其從三相靜止坐標系變換到兩相靜止坐標系,再與轉子位置結合,經過Park變換從兩相靜止坐標系變換到兩相旋轉坐標系交直軸電流ida和iqa;交、直軸參考電流id與iq與坐標變換得到的電流進行比較,采用id=0的控制方式,再經過PI調節器,交直軸控制電流ids和iqs,結合轉子角位置進行反Park和Clark反變換得到ua、ub和uc,再經過SVPWM模塊調制為6路開關信號,從而控制三相逆變器的開通與關斷。
采用以上的控制方式后,定子電流中只有交軸分量,且定子磁動勢空間矢量與永磁體磁場空間矢量正交,電機穩態輸出轉矩與定子電流成正比,且扭矩響應時間只有幾毫秒,所以相對于轉臺的大慣性時間常數,可以忽略電機的扭矩響應的動態過程。將電機扭矩環視為比例環節,得到電機扭矩簡化模型式為:
TE=k·iq
(3)
式中:TE—電機的輸出轉矩;k—比例系數;iq—直軸控制電流。
2.4 系統模型
電機驅動回轉系統的模型為:
(4)
該模型為變參數系統,令:
(5)
式中:Td—系統的外部干擾力矩。
3 控制策略
轉臺轉速采用轉速-轉矩雙閉環控制方案,系統結構框圖如圖3所示。
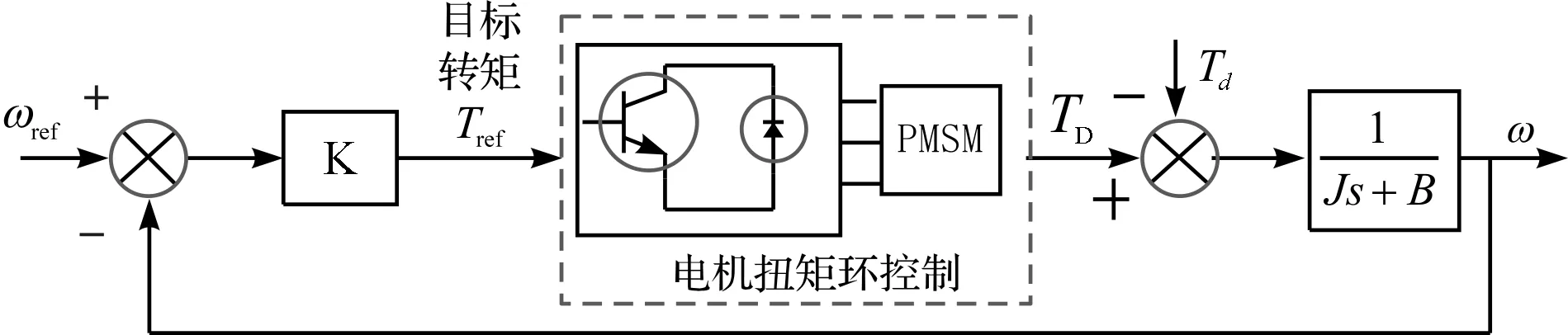
圖3 轉速雙環控制方案
圖3中:外環為轉速控制環,內環為電機扭矩控制環,因此本文的重點是對速度控制器K進行研究。
轉速閉環控制實現對目標轉速的跟蹤,為使速度控制而不受轉臺慣量變化和外部干擾轉矩的影響,筆者提出采用擾動觀測器(DOB)來抑制這些因素對轉速的影響。文獻[16]指出擾動觀測器能有效解決干擾和模型參數不確定性等問題,提高系統的魯棒性,被廣泛應用到速度、位置控制系統中。
采用DOB補償的速度控制方案如圖4所示。
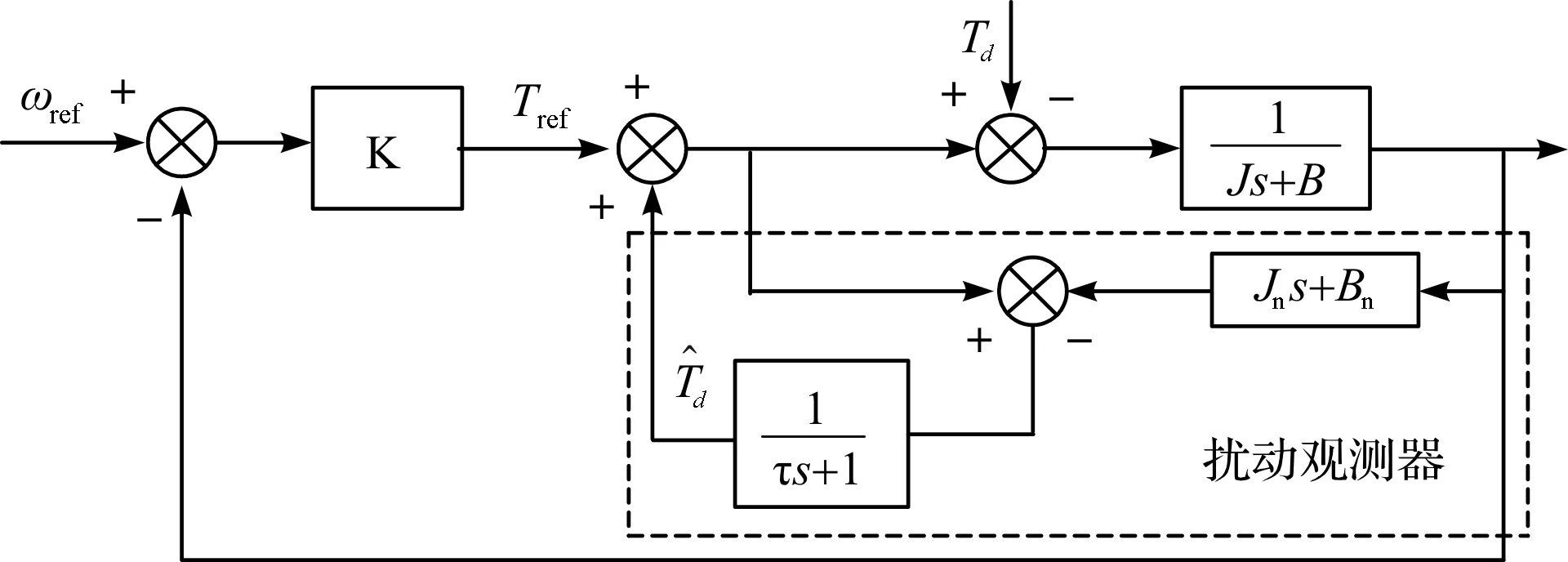
圖4 基于擾動觀測器的速度控制
圖4中:虛線框內為擾動觀測器(DOB)。因此,控制器設計主要包括擾動觀測器(DOB)和主控制器K的設計。
3.1 擾動觀測器設計
本研究將圖4中主控制器之外的部分單獨分析,并將系統模型做等價變換,擾動觀測器等價變換圖如圖5所示(其中虛線框內是擾動觀測器結構圖)。
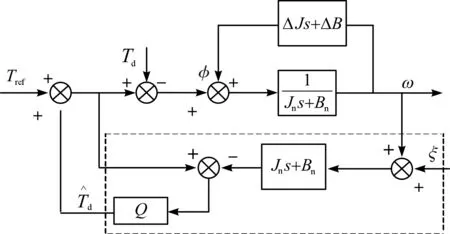
圖5 擾動觀測器等價變換Tref—主控制器的輸出轉矩;Td—干擾轉矩;ξ—測量干擾;φ—模型參數變化引起的干擾轉矩;補償轉矩;Q-濾波環節
(6)
式中:Jn—名義轉動慣量;Bn—名義阻尼比。
實際系統中,在參數變化及外部干擾的作用下,能否通過預估的V來抵消的關鍵在于擾動觀測器中Q的設計,具體說明如下:
將實際模轉化成下式:
(7)
并引入ξ測量干擾信號,則可得到下式:

(8)
對式(8)進行分析:希望通過設計Q(s),使得Td和φ對輸出沒有影響;而參數變化以及外部干擾都屬于低頻信號,為了對低頻信號充分抑制,在低頻段希望Q(s)≈1;而測量噪聲ξ大多處于高頻段,為了對高頻噪音能很好抑制,則Q(s)≈0,則可以得到理想的模型,如下式所示:
ω≈PnTref
(9)
因此,濾波器Q(s)設計為:(1)低通濾波器,低頻段近似于1,消除控制對象模型攝動及外部干擾的影響;(2)高頻段,Q(s)接近于0,達到抑制高頻測量噪聲的目的;(3)間常數τ是能影響擾動觀測器動態性能,因此τ的具體值需要試驗比較。
按照以上設計原則,所設計的Q(s)為:
(10)
3.2 主控制器
擾動觀測器的引入并不影響系統的傳遞函數,因此可以按名義系統來設計主控制器K。主控制器K采用PI控制,取等效慣量中間值得到系統模型,采用極點配置法得到主控制器系數:P=0.2,I=0.01。
4 仿真分析
為驗證以上所提出控制方案的可行性,筆者搭建Matlab/simulink仿真系統,對比PI控制和PI控制+DOB補償兩種方案在轉速控制方面的性能差別。仿真條件為:J=0.8 kgm2和J=2.2 kgm2兩種慣量,階躍干擾100 Nm,目標轉速設為先勻加速、再勻速、最后勻減速,加減速時間均為3 s,轉臺目標轉速為9.375 r/min。
仿真結果如圖6所示。
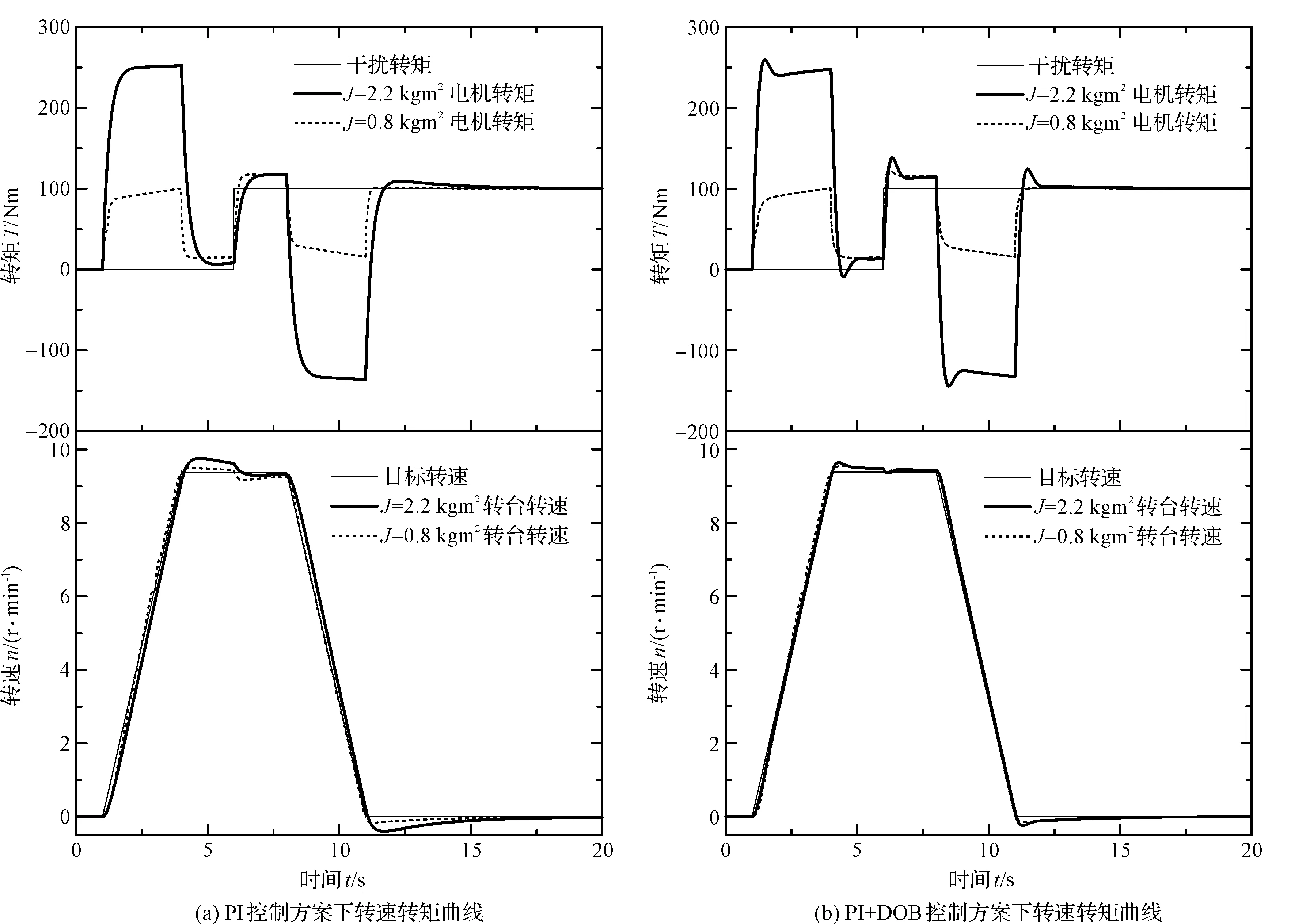
圖6 不同慣量和階躍干擾下速度扭矩曲線
圖6中:
(1)PI控制。轉臺實際轉速能跟蹤目標轉速,但慣量變化對轉速超調量影響較大,慣量J=2.2 kgm2和J=0.8 kgm2時超調量分別為4.1%和1.0%,慣量變化對超調量的影響為3.1%,這是由于模型參數變化所導致的;在階躍干擾下轉速有明顯波動,慣量J=2.2 kgm2和J=0.8 kgm2時,干擾扭矩為100 Nm不變,轉速波動量分別為3.2%和1.9%,干擾量對轉速波動的影響1.3%。因此,采用單一PI控制器,系統轉速不穩定,影響轉臺的操控和舒適性。
(2)PI+DOB控制。轉臺轉速跟蹤目標轉速,慣量變化對轉速超調量影響較小,慣量J=2.2 kgm2和J=0.8 kgm2時超調量分別為2.6%和1.6%,慣量變化對超調量的影響為1.0%,這主要取決于PI調節器參數的選擇;慣量J=2.2 kgm2和J=0.8 kgm2時,干擾扭矩為100 Nm不變,轉速波動量分別為1.2%和1.1%,外部干擾對轉速波動的影響為0.1%。
相對于PI控制,轉速波動明顯減弱,這是由于DOB環節感知實際模型參數相對于名義模型的變化和外部干擾,產生了補償作用,從而使得轉臺轉速比較一致,系統具有較好的操控和舒適性。
5 結束語
采用電機替代液壓馬達驅動挖掘機回轉平臺是混合動力挖掘機的一項有效節能措施,但是由于轉臺慣量大、變化范圍大,且受到外界干擾力矩時轉速波動明顯,容易影響回轉作業的操作性,針對該問題,本文建立了系統模型,測試了轉臺等效慣量的變化范圍,提出了PI+擾動觀測器的控制方案,搭建了系統仿真模型,在最大和最小等效慣量時,并施加階躍干擾力矩的情況下,對回轉速度控制系統仿真。
仿真結果表明:采用PI控制,轉臺實際轉速能跟蹤目標轉速,但是慣量變化對轉速超調量影響較大,并且干擾作用下轉速波動明顯,而PI+DOB控制中,DOB環節感知實際模型參數相對于名義模型的變化以及外部干擾,產生了補償作用,使轉臺慣量變化對轉速超調量的影響從3.1%下降到1%,外部干擾對轉速波動的影響從1.3%下降到0.1%。
因此,擾動觀測器環節減小了慣量變化對轉速超調的影響,增強了速度控制的抗干擾能力,改善了回轉作業的操作性,并且該控制策略結構簡單,容易在挖掘機普通性能控制器上實現。
參考文獻(References):
[1] MASAYUKI K. The development of an 8 ton class hybrid hydraulic excavator SK80H[J]. KOBELCO Technology Review, 2013,31(1):6-11.
[2] MANABU E, SEIJI I, SHINYA I, et al. Adoption of electrification and hybrid drive for more energy-efficient construction machinery[J]. Hitachi Review, 2013,62(2):118-122.
[3] INOUE H. Introduction of PC200-8 hybrid hydraulic excavator[J]. KOMATSU Technical Report, 2008,54(161):1-6.
[4] INOUE H, YOSHIDA H. Development of hybrid hydraulic excavators[J]. International Journal of Automation Technology, 2012,16(4):516-520.
[5] WANG Q F, ZHANG Y T, XIAO Q. Evaluation for energy saving effect and simulation research on energy saving of hydraulic system in hybrid construction machinery[J]. Chinese Journal of Mechanical Engineering, 2005,41(12):135-140.
[6] ZHANG Y T, WANG Q F, XIAO Q. Simulation research on energy saving of hydraulic system in hybrid construction machinery[C]. Proceedings of the Sixth International Conference on Fluid Power Transmission and Control, Hangzhou:ICFP,2005.
[7] 邢樹鑫,林明智,戴群亮.混合動力挖掘機回轉系統設計[J].工程機械,2010,41(12):38-40.
[8] 成 凱,張 俊,王鵬宇,等.混合動力挖掘機回轉系統仿真模型的建立與分析[J].建筑機械,2011(6):81-86.
[9] 郭 浩,王 輝,吳 軒,等.混合動力挖掘機電回轉系統儲能容量的優化配置[J].中國機械工程,2016,27(12):1572-1578.
[10] JIN K, PARK T, LEE H. A control method to suppress the swing vibration of a hybrid excavator using sliding mode approach[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2012,226(5):1237-1253.
[11] 陸 豪,李運華,田勝利,等.驅動大慣量低剛度負載的推力矢量控制電動伺服機構的u綜合魯棒控制[J].機械工程學報,2011,47(2):180-188.
[12] 王衛紅,姚志超,鄭連強,等.三軸飛行仿真轉臺自適應復合控制方法[J].電機與控制學報.2011,15(9):74-79.
[13] YAO B. Advanced motion control from classical PID to nonlinear adaptive robust control[C]. Proceedings of the 11th IEEE International Workshop on Advanced Motion Control, Nagaoka:IEEE,2010.
[14] 韓素賢,姚 洪,魏毅立.混合動力挖掘機電機驅動回轉系統設計[J].電氣傳動,2018,48(3):47-50.
[15] 姚 洪.混合動力挖掘機電機驅動回轉系統的控制及節能研究[D].杭州:浙江大學機械工程學院,2015.
[16] 樊玉華.分數階干擾觀測器研究[D].大連:大連交通大學電氣信息學院,2007.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19