運(yùn)行速度對(duì)馱背運(yùn)輸安全性影響的仿真分析
2020-04-28 10:24:18林武馮仁錦張皓王凱
專用汽車(chē) 2020年4期
林武 馮仁錦 張皓 王凱
眉山中車(chē)物流裝備有限公司 四川眉山 620020
1 前言
馱背運(yùn)輸是多式聯(lián)運(yùn)模式的一種,它結(jié)合了公路運(yùn)輸與鐵路運(yùn)輸?shù)膬?yōu)點(diǎn),將原有貨物單一的長(zhǎng)途汽車(chē)運(yùn)輸方式變?yōu)楣疯F路聯(lián)合運(yùn)輸方式,通過(guò)貨運(yùn)車(chē)輛或半掛車(chē)承載貨物后自行駛?cè)牖虻跹b至專用鐵路運(yùn)輸車(chē)輛,再通過(guò)鐵路完成長(zhǎng)途運(yùn)輸,到達(dá)目標(biāo)地點(diǎn)后,汽車(chē)自行開(kāi)下或吊離鐵路專用車(chē)輛并駛往最終目的地的一種快捷運(yùn)輸模式。馱背運(yùn)輸模式如圖1所示。
目前國(guó)內(nèi)外學(xué)者對(duì)于軌道車(chē)輛的運(yùn)行安全性方面做了大量的動(dòng)力學(xué)研究。國(guó)外方面,HansTrue等人探討了軌道車(chē)輛系統(tǒng)中的一些非線性情況,并提出了軌道車(chē)輛非線性臨界速度的基本算法。Schupp利用SIMPACK軟件并通過(guò)延續(xù)算法,研究了復(fù)雜軌道車(chē)輛系統(tǒng)相關(guān)的穩(wěn)定性問(wèn)題。國(guó)內(nèi)學(xué)者在該軌道車(chē)輛運(yùn)行安全領(lǐng)域內(nèi)也做了大量的研究。羅仁等通過(guò)建立在三種編組條件下列車(chē)的縱向-橫向-垂向耦合模型,對(duì)列車(chē)車(chē)組中每輛車(chē)的線性與非線性運(yùn)行穩(wěn)定性進(jìn)行了仿真研究。趙洪倫等人深入研究了眾多優(yōu)化方法,通過(guò)縱橫向定位剛度的變化以及對(duì)于其臨界速度的分析提高了列車(chē)的運(yùn)行安全性。
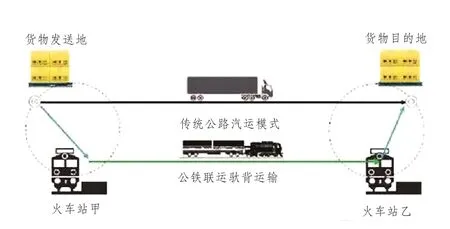
圖1 馱背運(yùn)輸模式
以上研究均針對(duì)的是普通鐵路客運(yùn)和貨運(yùn)車(chē)輛,并未針對(duì)馱背運(yùn)輸車(chē)輛進(jìn)行專門(mén)研究。目前馱背運(yùn)輸在我國(guó)尚處于起步階段,有關(guān)馱背運(yùn)輸車(chē)輛的仿真研究相對(duì)較少。本文討論的馱背運(yùn)輸車(chē)單車(chē)車(chē)體長(zhǎng)度為19.32 m,轉(zhuǎn)向架中心距為17 m。與計(jì)算車(chē)輛相比,車(chē)輛定距較小。本文應(yīng)用Simpack軟件及與軌道車(chē)輛仿真相關(guān)的理論,對(duì)鐵路馱背運(yùn)輸車(chē)輛系統(tǒng)進(jìn)行仿真,分析得出鐵路馱背運(yùn)輸車(chē)輛運(yùn)行的安全速度。
2 馱背運(yùn)輸車(chē)輛仿真
2.1 仿真樣車(chē)的選取
本仿真選用的是某型鐵路馱背運(yùn)輸車(chē),動(dòng)力學(xué)參數(shù)如表1所示,單車(chē)長(zhǎng)度約為19.32 m,車(chē)輛承載面長(zhǎng)度約為15 m,最大載重不超過(guò)49 t,如圖2所示。
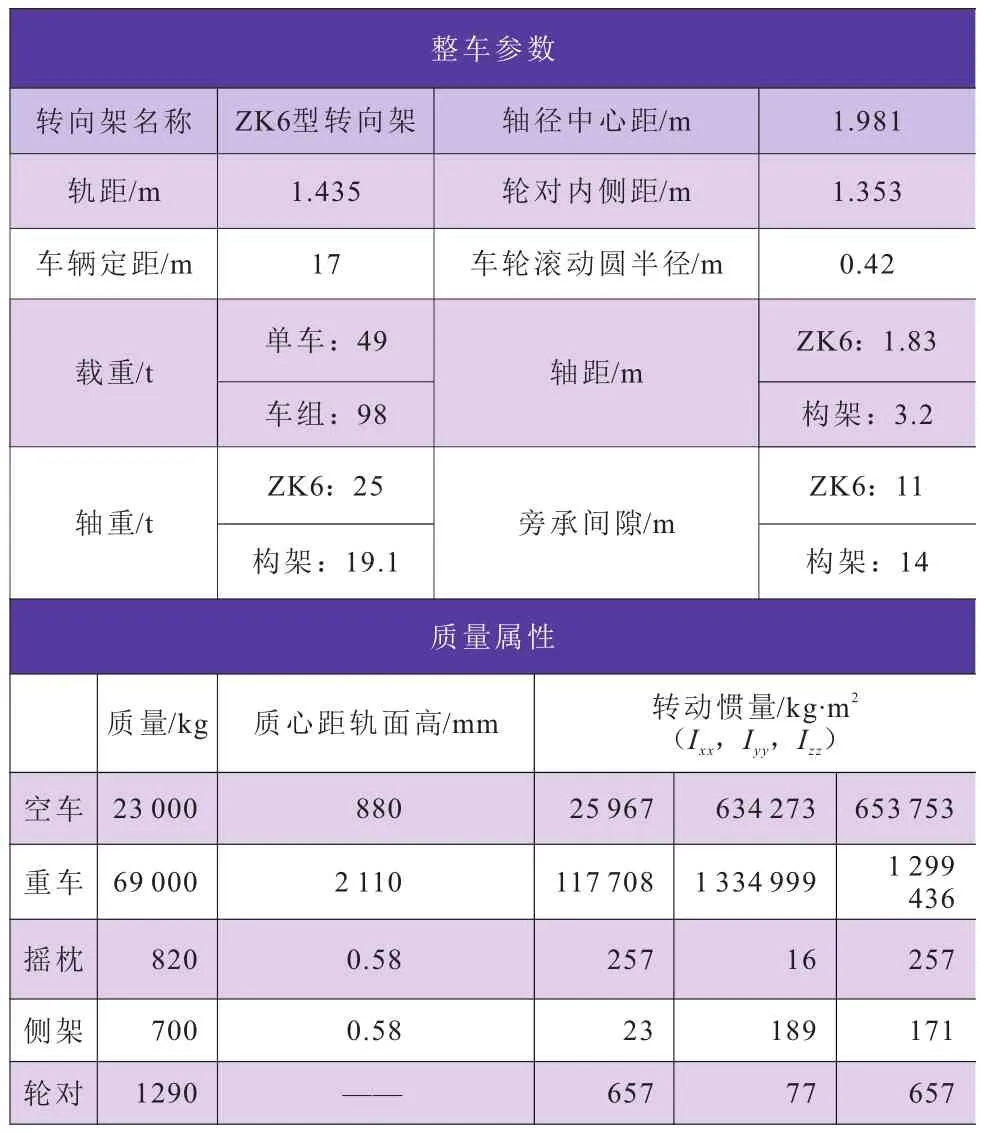
表1 鐵路馱背運(yùn)輸車(chē)輛整車(chē)參數(shù)表

圖2 仿真用馱背運(yùn)輸車(chē)輛
2.2 模型建立及簡(jiǎn)化
在Simpack軟件的rail_track模塊中依次建立輪對(duì)模型、側(cè)架模型、承載鞍模型、虛車(chē)體模型、搖枕模型,ZK6轉(zhuǎn)向架模型由以上幾個(gè)子模型組成,接下來(lái)在此模塊下建立車(chē)體模型,車(chē)體模型和前后轉(zhuǎn)向架模型裝配構(gòu)成了鐵路馱背車(chē)輛的總體模型。

圖3 半掛車(chē)空氣懸掛系統(tǒng)
運(yùn)輸?shù)陌霋燔?chē)空氣懸掛系統(tǒng)如圖3所示,參考UIC596-5鐵路貨車(chē)運(yùn)送公路車(chē)輛標(biāo)準(zhǔn),空氣懸架氣囊在鐵路運(yùn)輸過(guò)程中應(yīng)保持無(wú)氣狀態(tài),這是因?yàn)榘霋燔?chē)上鐵路馱背車(chē)輛后,就切斷了供氣系統(tǒng),在長(zhǎng)時(shí)間的運(yùn)輸過(guò)程中,由于鐵路馱背車(chē)輛顛簸運(yùn)行,氣囊里的氣體在半掛車(chē)高度控制閥作用下一點(diǎn)點(diǎn)地排出,會(huì)增加運(yùn)輸過(guò)程中的不穩(wěn)定性。放氣后半掛車(chē)支撐在氣囊緩沖塊上,緩沖塊加上導(dǎo)向臂和阻尼器就是一個(gè)剛性支撐,故半掛車(chē)可簡(jiǎn)化為一個(gè)質(zhì)量塊模型,整體模型如圖4所示。
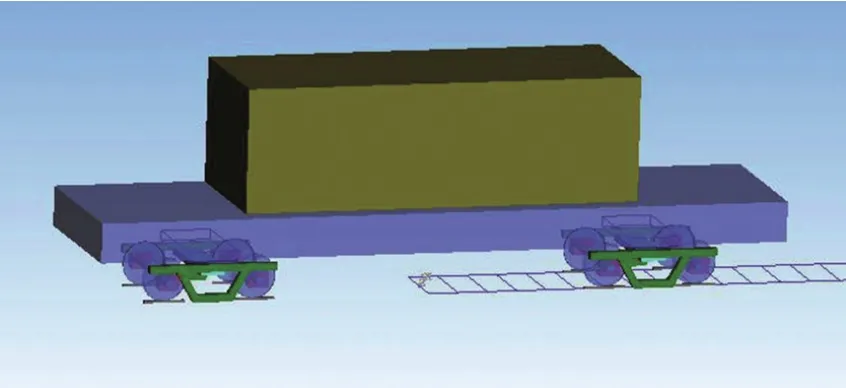
圖4 Simpack鐵路馱背運(yùn)輸車(chē)輛模型
2.3 施加約束
通過(guò)表2所示的ZK6轉(zhuǎn)向架的具體鉸接方式進(jìn)行約束施加,并定義模型中存在的二系力,車(chē)輛系統(tǒng)總體拓?fù)潢P(guān)系如圖5所示。
a.定義一系力作用在鐵路馱背運(yùn)輸車(chē)輛承載鞍和側(cè)架之間,在鐵路馱背運(yùn)輸車(chē)輛承載鞍和側(cè)架之間建立一系力標(biāo)記點(diǎn),所述標(biāo)記點(diǎn)即為鉸接點(diǎn),將車(chē)輛一系懸掛的實(shí)際剛度值和阻尼值輸入到Simpack軟件中定義完成一系力。承載鞍與側(cè)架之間通過(guò)Simpack軟件中的2號(hào)鉸接形式鉸接;
b.定義二系力作用在鐵路馱背運(yùn)輸車(chē)輛搖枕和側(cè)架之間,在鐵路馱背運(yùn)輸車(chē)輛搖枕與側(cè)架之間建立二系力標(biāo)記點(diǎn),所述標(biāo)記點(diǎn)即為鉸接點(diǎn),將二系懸掛實(shí)際剛度值和阻尼值輸入到Simpack軟件中定義完成二系力。搖枕與側(cè)架之間通過(guò)Simpack軟件中的25號(hào)鉸接形式鉸接。
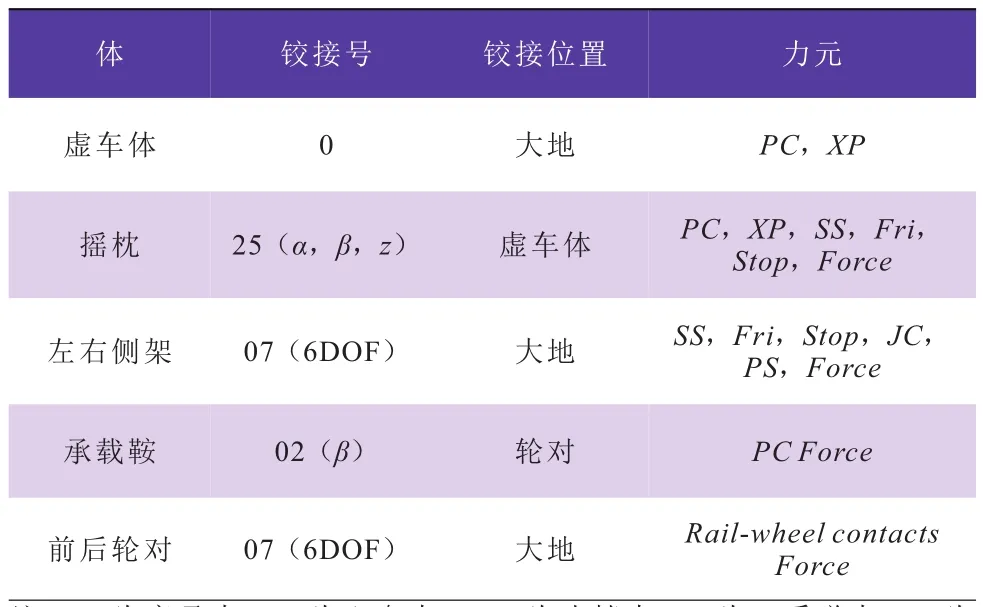
表2 ZK6轉(zhuǎn)向架的具體鉸接方式

圖5 鐵路馱背運(yùn)輸系統(tǒng)總體拓?fù)鋱D
2.4 仿真條件設(shè)定
當(dāng)車(chē)輛系統(tǒng)受到一個(gè)初始激勵(lì)后,分析車(chē)輛在不同的運(yùn)行速度下輪對(duì)橫移量隨時(shí)間的變化情況,如收斂,則車(chē)輛處于穩(wěn)定狀態(tài),如圖6所示;如發(fā)散,則車(chē)輛處于失穩(wěn)狀態(tài),如圖7所示;如既不收斂,也不發(fā)散,則車(chē)輛處于臨界狀態(tài),如圖8所示,此時(shí)相對(duì)應(yīng)的車(chē)輛運(yùn)行速度稱為車(chē)輛的臨界速度。

圖6 穩(wěn)定狀態(tài)下輪對(duì)橫移量隨行程變化曲線
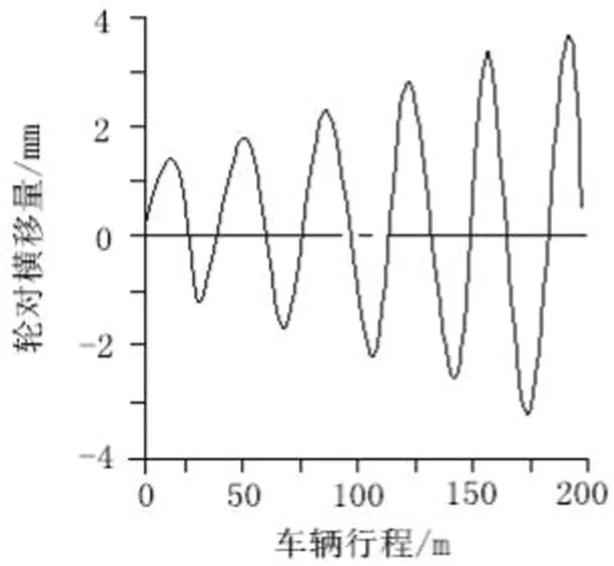
圖7 失穩(wěn)狀態(tài)下輪對(duì)橫移量隨行程變化曲線
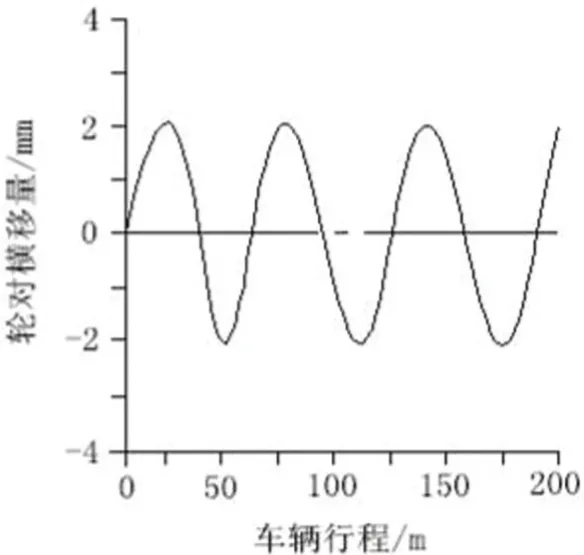
圖8 臨界狀態(tài)下輪對(duì)橫移量隨行程變化曲線
在Simpack軟件中對(duì)軌道施加激勵(lì)前,需要先定義輸入的函數(shù)列,新建名稱為“Track-related”和“Rail-related”的函數(shù)列,分別選擇T R E激勵(lì)文件“binary_track_excit_tre”和“binary_rail_excit_tre”,定義完成橫向、垂向、側(cè)滾、軌距、左右橫向和左右垂向8種不平順條件輸入函數(shù),其中橫向不平順函數(shù)圖如圖9所示。
在Simpack軟件中新建一個(gè)橫向的軌道不平順條件,名稱為“Lat”,在Type中選擇Distance Domain(空間域)里面的“109:From Input Function(Adv)”,因?yàn)檐壍啦黄巾樢话愣际强臻g域的,如果選擇時(shí)域或者頻域的激勵(lì)是施加不到線路上去的。在輸入激勵(lì)功能項(xiàng)中選擇上一步建立的輸入函數(shù)列“I_Lateral”,定義完成軌道橫向激勵(lì),如圖10所示。用同樣的方法定義其他7種不平順條件。將定義好的激勵(lì)施加與軌道不平順條件中,激勵(lì)開(kāi)始位置、激勵(lì)平滑長(zhǎng)度和激勵(lì)終止位置分別為50m、5m、100m,如圖11所示。接下來(lái)進(jìn)行臨界速度分析。使用單次積分法計(jì)算非線性臨界速度,線路是有50 m激勵(lì)的直線,然后讓車(chē)輛以一定的速度通過(guò),看左右輪對(duì)的橫移量,按2.4章節(jié)所述的評(píng)價(jià)原理進(jìn)行判斷,如果收斂,增大此時(shí)的仿真速度,如果出現(xiàn)等幅震蕩,那么可以取兩次仿真速度的中間值,再進(jìn)行計(jì)算,直到找到時(shí)速為akm/h,那么輪對(duì)橫移量是穩(wěn)定狀態(tài),而在(a+1)km/h為臨界狀態(tài),那么(a+1)km/h為臨界速度。

圖9 橫向不平順函數(shù)定義

圖10 定義橫向激勵(lì)

圖11 施加軌道不平順條件
初始仿真速度設(shè)置為100 km/h,仿真時(shí)間設(shè)置為15 s,采樣頻率設(shè)置為100 Hz,進(jìn)行離線積分,得出輪對(duì)橫移量隨時(shí)間的變化曲線。逐漸增加仿真速度,進(jìn)行離線積分,得出輪對(duì)橫移量隨時(shí)間的變化曲線。
3 仿真結(jié)果分析
仿真速度設(shè)置為100 km/h時(shí),輪對(duì)橫移量隨時(shí)間的變化曲線如圖12所示。
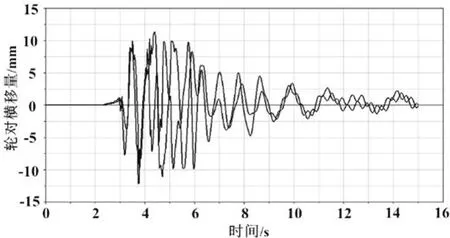
圖12 100 km/h時(shí)輪對(duì)橫移量隨時(shí)間變化曲線
由圖12可以看出:鐵路馱背運(yùn)輸車(chē)在仿真進(jìn)行4 s后速度達(dá)到100 km/h,此時(shí)輪對(duì)橫移量隨著速度的增大而增加,從圖中可以看出最大橫移量數(shù)值約為12 mm,之后車(chē)輛仍然安全運(yùn)行,在6 ~15 s內(nèi)車(chē)輛處于恒定速度狀態(tài),輪對(duì)橫移量也逐漸有規(guī)律的減小,此時(shí)車(chē)輛進(jìn)入穩(wěn)定狀態(tài),說(shuō)明100 km/h為安全運(yùn)行速度。

圖13 110 km/h時(shí)輪對(duì)橫移量隨時(shí)間變化曲線
由圖13、14可以看出:隨著仿真速度設(shè)定值增大,車(chē)輛進(jìn)入穩(wěn)定速度前的4~6 s內(nèi),輪對(duì)橫移量數(shù)值較大,最大橫移量約為17 mm,仍然處于安全范圍內(nèi),6 s之后車(chē)輛運(yùn)行速度穩(wěn)定,橫移量逐漸呈規(guī)律性減小,說(shuō)明車(chē)輛仍然處于安全運(yùn)行速度下的穩(wěn)定狀態(tài)。6~15 s時(shí),輪對(duì)橫移量曲線隨時(shí)間的變化越來(lái)越趨于平穩(wěn),證明此時(shí)車(chē)輛運(yùn)行速度符合安全性要求。
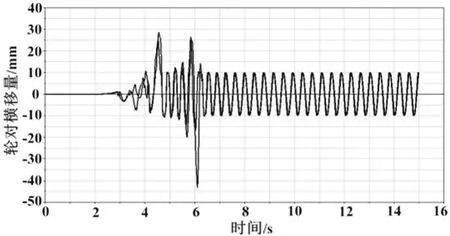
圖14 119 km/h時(shí)輪對(duì)橫移量隨時(shí)間變化曲線
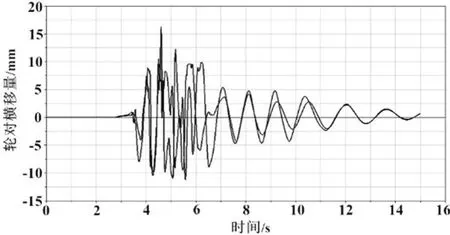
圖15 120 km/h時(shí)輪對(duì)橫移量隨時(shí)間變化曲線
由圖15可以看出:在速度處于恒定狀態(tài)以前,最大橫移時(shí)間出現(xiàn)在6 s左右,最大橫移量為43 mm左右,6 s后當(dāng)速度處于恒定狀態(tài)時(shí),輪對(duì)橫移量也處于恒定狀態(tài),根據(jù)圖6所示的原理圖,速度為120 km/h時(shí),6 s后的輪對(duì)橫移量隨時(shí)間變化曲線既不收斂也不發(fā)散,說(shuō)明此時(shí)的速度為臨界速度。
由圖16所示,將仿真速度設(shè)置為121 km/h時(shí),速度在進(jìn)入穩(wěn)定狀態(tài)后,輪對(duì)橫移量隨時(shí)間變化曲線呈發(fā)散狀態(tài),最大橫移時(shí)間出現(xiàn)在仿真時(shí)間的15 s左右,最大橫移量約為43 mm處,之后根據(jù)圖線呈現(xiàn)的規(guī)律可看出,輪對(duì)橫移量將隨時(shí)間逐漸增大,直至輪對(duì)橫移量超出安全橫移范圍,車(chē)輛失穩(wěn)。
由上述仿真結(jié)果總結(jié):在仿真速度120 km/h前輪對(duì)橫移量隨時(shí)間變化逐漸降低,說(shuō)明車(chē)輛系統(tǒng)逐漸趨于穩(wěn)定狀態(tài),當(dāng)速度達(dá)到120 km/h時(shí),輪對(duì)橫移量隨時(shí)間變化保持一個(gè)不變的值,圖線既不現(xiàn)收斂也不發(fā)散,說(shuō)明此時(shí)車(chē)輛系統(tǒng)處于臨界狀態(tài),當(dāng)速度大于120 km/h時(shí),輪對(duì)橫移量曲線波峰開(kāi)始逐漸增大趨于發(fā)散狀態(tài),說(shuō)明此時(shí)車(chē)輛系統(tǒng)正趨于失穩(wěn)狀態(tài)。
4 結(jié)語(yǔ)
a.通過(guò)Simpack軟件對(duì)鐵路馱背運(yùn)輸車(chē)輛系統(tǒng)進(jìn)行模擬和仿真,可通過(guò)軟件自帶的離線積分功能快速地計(jì)算出所需要的各種數(shù)據(jù),包括本文所得到的運(yùn)行速度相關(guān)數(shù)據(jù),也可得到運(yùn)行過(guò)程中車(chē)輛結(jié)構(gòu)內(nèi)產(chǎn)生的力的大小,為實(shí)際的車(chē)輛系統(tǒng)試驗(yàn)提供了一定的依據(jù)。
b.通過(guò)單次積分法計(jì)算運(yùn)行速度,再通過(guò)輪對(duì)橫移結(jié)果圖判定車(chē)輛系統(tǒng)的臨界速度,仿真得出該鐵路馱背運(yùn)輸車(chē)輛系統(tǒng)的最大運(yùn)行速度為120 km/h,對(duì)于該車(chē)輛系統(tǒng)的安全運(yùn)輸具有指導(dǎo)性作用。
c.隨著仿真軟件的逐步升級(jí),仿真技術(shù)不斷發(fā)展,對(duì)于車(chē)輛仿真的精確度要求越來(lái)越高,仿真結(jié)果與實(shí)際實(shí)驗(yàn)結(jié)果的相符程度決定了對(duì)于仿真結(jié)果的一系列應(yīng)用,所以對(duì)于該鐵路馱背運(yùn)輸系統(tǒng)的實(shí)際動(dòng)力學(xué)試驗(yàn),是接下來(lái)要做的工作。
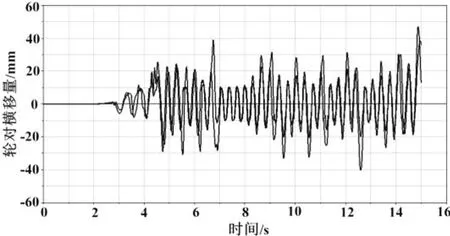
圖16 121 km/h時(shí)輪對(duì)橫移量隨時(shí)間變化曲線
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
云南畫(huà)報(bào)(2021年12期)2021-03-08 00:50:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
鐵道通信信號(hào)(2018年7期)2018-08-29 01:17:04
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年4期)2016-04-04 02:58:04
山東青年(2016年1期)2016-02-28 14:25:25
工程建設(shè)與設(shè)計(jì)(2016年3期)2016-02-27 10:50:46
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
