基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法
2020-04-28 02:00:20楊興寶施文輝
航天控制 2020年1期
關(guān)鍵詞:方法
楊興寶 黃 敏 施文輝
海軍大連艦艇學(xué)院,大連 116018
從上世紀(jì)80年代以來,特別是近十幾年,通過在風(fēng)洞中的飛行器中加入控制,來真實(shí)復(fù)現(xiàn)飛行器機(jī)動運(yùn)動過程,達(dá)到測試飛行器性能目的的試驗技術(shù)日漸興起[1]。這種試驗技術(shù)在有控制機(jī)構(gòu)參與下,其飛行器氣動力、舵面負(fù)載及姿態(tài)運(yùn)動都可以是真實(shí)的,相比傳統(tǒng)的動態(tài)風(fēng)洞試驗(如強(qiáng)迫風(fēng)洞試驗、自由振蕩風(fēng)洞試驗、風(fēng)洞自由飛試驗)[2]與半實(shí)物仿真試驗[3-4],它能為飛行器空氣動力學(xué)與飛行力學(xué)研究、飛行控制系統(tǒng)的測試與評估提供更加真實(shí)的試驗環(huán)境[1]。
鑒于這種基于風(fēng)洞的飛行器有控試驗技術(shù)更貼近真實(shí)飛行,許多國家已開展了相關(guān)研究,但基本上在試驗?zāi)芰Φ拈_發(fā)階段,即如何構(gòu)建相關(guān)試驗系統(tǒng)來實(shí)現(xiàn)研究目標(biāo),目前主要用于辨識飛行器動導(dǎo)數(shù)[5-11]、預(yù)示飛行性能[12-14]及設(shè)計與評估飛行控制律[15-24],尚未涉及到如何基于這種試驗技術(shù)達(dá)到評定飛行器控制性能的目的,即基于風(fēng)洞的飛行器控制性能評估方法。因此,本文以導(dǎo)彈姿態(tài)控制性能評估為例,研究了一種基于風(fēng)洞的飛行器控制性能評估方法。
本文共分為5部分:1)研究背景;2)列出了典型的導(dǎo)彈俯仰控制系統(tǒng)姿態(tài)控制性能及其指標(biāo);3)針對俯仰姿態(tài)控制性能評估,提出了1種基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法;4)基于某高超聲速導(dǎo)彈數(shù)學(xué)仿真模型,對基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法進(jìn)行仿真,初步驗證其可行性;5)結(jié)論。
1 導(dǎo)彈姿態(tài)控制性能及指標(biāo)
根據(jù)文獻(xiàn)[25-26],基于風(fēng)洞可評估的飛行器控制系統(tǒng)的性能包括定常飛行下的導(dǎo)航/制導(dǎo)性能、常規(guī)姿態(tài)運(yùn)動下的控制性能、非定常姿態(tài)運(yùn)動下的控制性能、姿態(tài)穩(wěn)定性能及頭部指向敏捷性能。因此,本文選取導(dǎo)彈常規(guī)姿態(tài)控制性能評估為例,研究基于風(fēng)洞的導(dǎo)彈控制性能評估方法。
典型導(dǎo)彈俯仰控制系統(tǒng)的結(jié)構(gòu)簡圖如圖1所示,伺服機(jī)構(gòu)采用空氣舵的操縱方式,姿態(tài)傳感器為角陀螺儀,以測量俯仰角。其工作原理是:通過輸入俯仰角指令φi給控制器,形成舵偏角指令δ,驅(qū)動舵面偏轉(zhuǎn),使導(dǎo)彈彈體響應(yīng)舵偏進(jìn)行自由俯仰運(yùn)動,陀螺儀敏感到當(dāng)前俯仰角速率φo,反饋給俯仰控制器,控制器結(jié)合輸入與輸出誤差,不斷修正舵偏角,直到飛行器俯仰角達(dá)到φc。
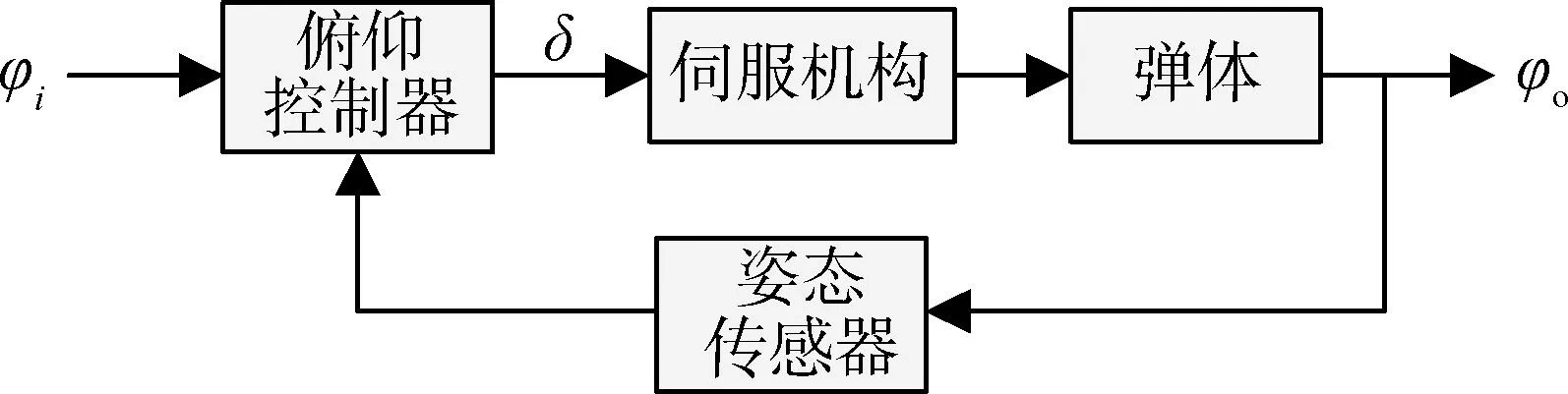
圖1 導(dǎo)彈俯仰控制系統(tǒng)結(jié)構(gòu)簡圖
常規(guī)姿態(tài)運(yùn)動下,上述俯仰控制系統(tǒng)的姿態(tài)控制性能可用追蹤誤差etr、過渡時間ts及超調(diào)量σ三項指標(biāo)來表征。假設(shè)俯仰角指令φc是階躍輸入,得到的姿態(tài)響應(yīng)如圖2所示。
其中,φm為姿態(tài)跟蹤峰值;φe為姿態(tài)跟蹤穩(wěn)態(tài)值;追蹤誤差etr是φi與φe的差異量,用于表征姿態(tài)控制精度;過渡時間ts是指俯仰角輸出量達(dá)到φe值的98%或102%所需的時間,用于表征姿態(tài)控制速度;超調(diào)量σ是φm與φe的差異量,用于表征姿態(tài)控制最大偏差量。接下來,將介紹基于風(fēng)洞試驗如何獲取到這些性能指標(biāo),并評定俯仰控制性能。
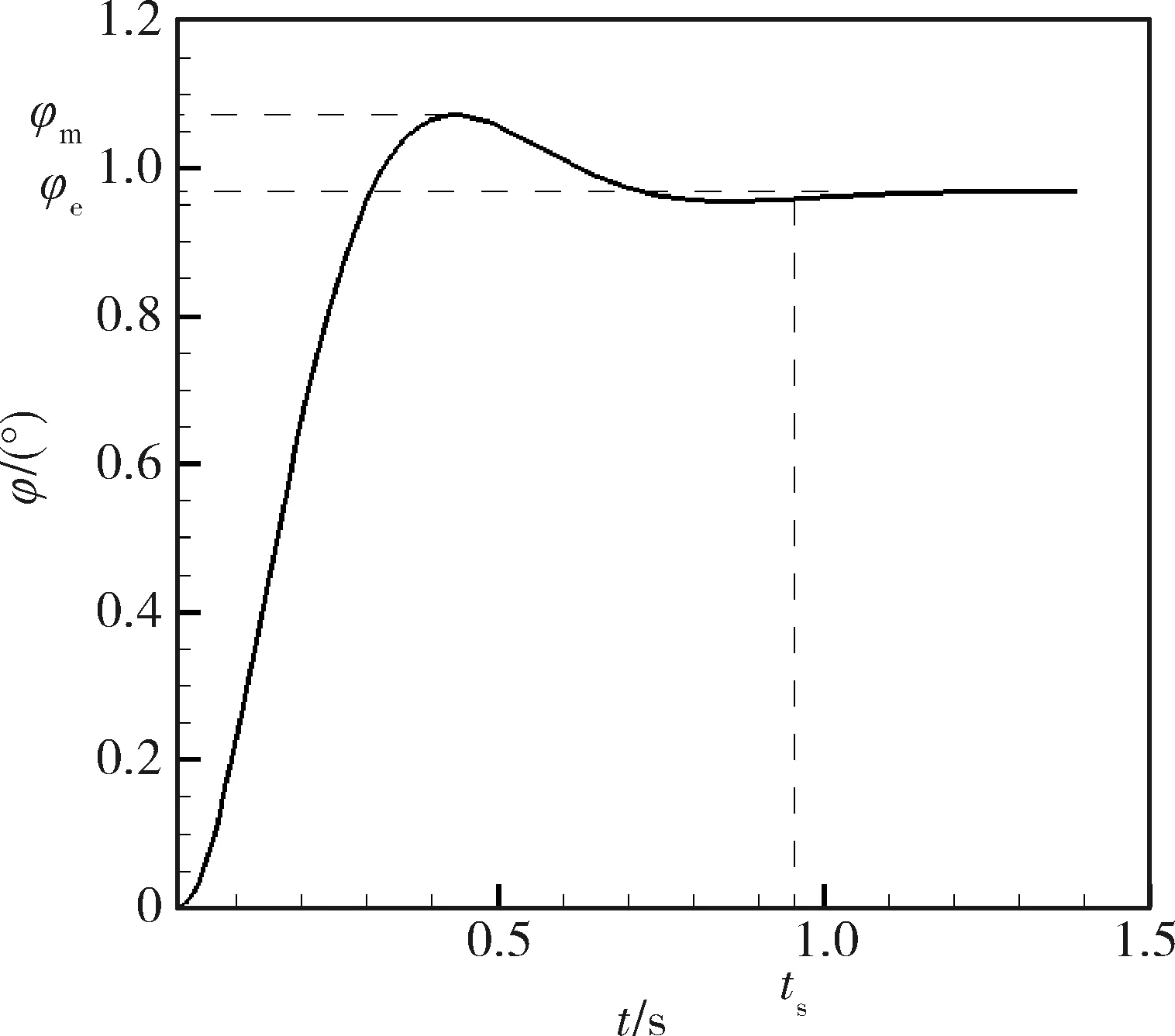
圖2 作為示例的俯仰角階躍響應(yīng)
2 評估方法
評估方法包含3部分內(nèi)容:1)試驗方法,指采取怎樣的試驗來獲取到性能指標(biāo)評價所需要的原始試驗數(shù)據(jù);2)數(shù)據(jù)處理方法,指在得到原始試驗數(shù)據(jù)后,采用怎樣的計算方法將試驗數(shù)據(jù)轉(zhuǎn)換為性能指標(biāo)對應(yīng)的數(shù)據(jù)類型;3)飛控系統(tǒng)性能評定方法,指采用怎樣的評定準(zhǔn)則來確定控制性能的優(yōu)異。
2.1 試驗方法
基于風(fēng)洞的導(dǎo)彈姿態(tài)控制試驗系統(tǒng)方案如圖3所示。導(dǎo)彈控制系統(tǒng)硬件如控制器、舵機(jī)及傳感器可按照真實(shí)飛行時硬件布局設(shè)置,裝有上述硬件的導(dǎo)彈試驗件置于某專用模型支撐裝置上面,該支撐裝置通過設(shè)置軸承或萬向節(jié)等裝置可以允許飛行器自由旋轉(zhuǎn)。在支撐裝置上還安裝有天平,以測得升力、俯仰力矩等氣動力信息,反饋給實(shí)時數(shù)據(jù)采集與控制系統(tǒng)。由于風(fēng)洞中僅能復(fù)現(xiàn)攻角α,不能復(fù)現(xiàn)含有速度傾角θ的真實(shí)俯仰角反饋量φo,因此需通過數(shù)據(jù)采集系統(tǒng)收集攻角和升力等數(shù)據(jù),實(shí)時計算俯仰角,并處理得到的俯仰角信號,再發(fā)送給控制器,以修正舵偏。
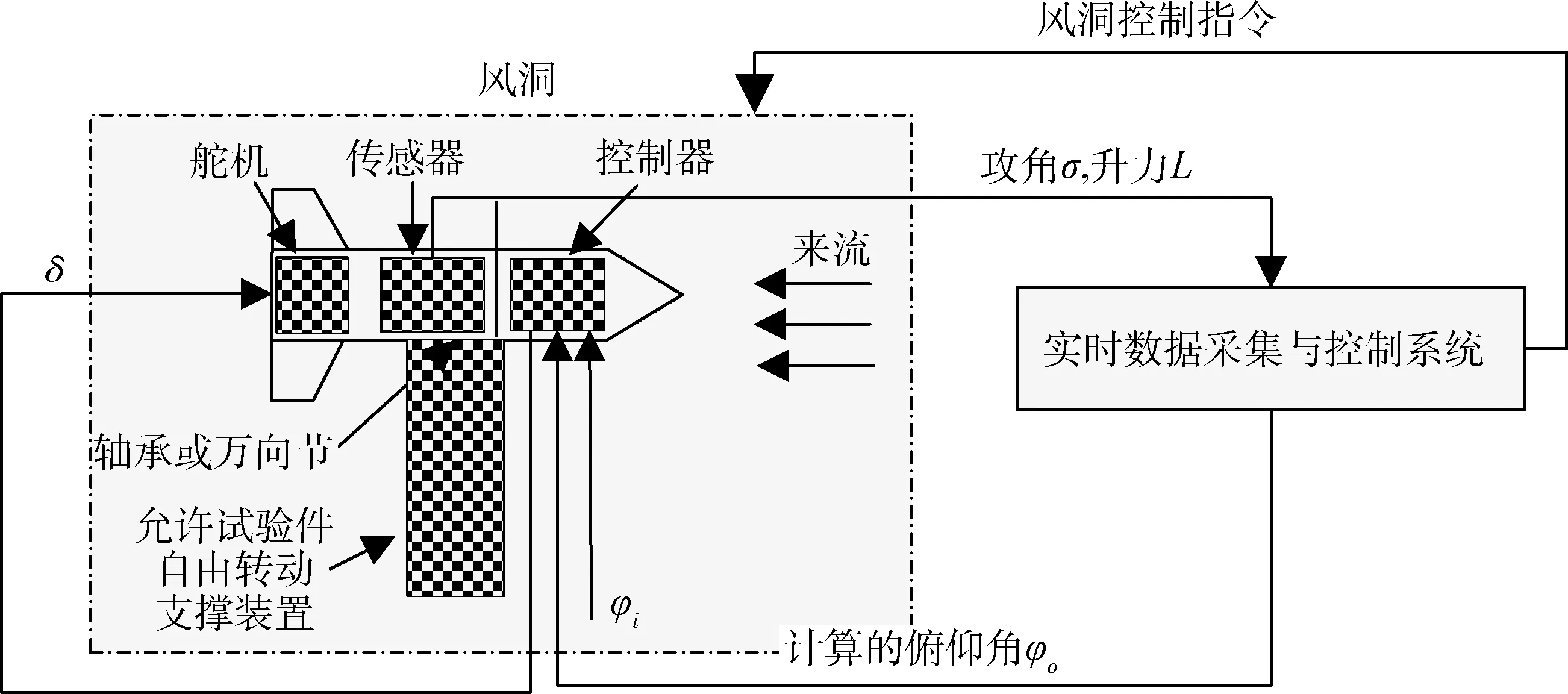
圖3 基于風(fēng)洞的導(dǎo)彈姿態(tài)控制試驗系統(tǒng)方案
基于上述試驗系統(tǒng),可開展俯仰姿態(tài)操縱試驗,其試驗原理為:首先,給控制器預(yù)載入期望的俯仰角控制指令φi,控制器產(chǎn)生舵控制指令δc,傳遞給舵機(jī),驅(qū)動舵面偏轉(zhuǎn);然后,導(dǎo)彈像真實(shí)飛行那樣響應(yīng)舵偏進(jìn)行姿態(tài)運(yùn)動,只不過這里的姿態(tài)運(yùn)動是攻角運(yùn)動;緊接著,傳感器測量到飛行器運(yùn)動后的攻角αo,天平實(shí)時測量升力L,傳遞給數(shù)據(jù)采集系統(tǒng),數(shù)據(jù)采集系統(tǒng)利用L計算出速度傾角θ,并結(jié)合αo計算出俯仰角φo(其計算公式如式(1)所示[27]),實(shí)時反饋給控制器,控制器根據(jù)φi與φo的差異調(diào)整舵控制指令δc,直到φo跟蹤到φi或φo發(fā)散。在上述試驗過程中,數(shù)據(jù)采集系統(tǒng)實(shí)時收集并處理數(shù)據(jù),得到隨時間變化的俯仰角響應(yīng)φo,通過對φo進(jìn)行處理和分析,對姿態(tài)控制性能進(jìn)行評估。
(1)
式中,T為推力(本文恒取為0);m為導(dǎo)彈質(zhì)量;g為當(dāng)?shù)刂亓铀俣龋籚為導(dǎo)彈速度。
2.2 數(shù)據(jù)處理方法
根據(jù)上述試驗方法,開展俯仰姿態(tài)操縱試驗,獲取到俯仰角響應(yīng)φo。由于俯仰角指令為階躍輸入,俯仰角響應(yīng)即為類似如圖2所示的階躍響應(yīng)曲線。因此,通過試驗獲得數(shù)據(jù)φo,即可計算到俯仰控制性能指標(biāo)etr,ts及σ。其中,ts可以直接從響應(yīng)曲線中讀取,etr,σ則需通過公式計算得到:
σ=|φm-φe|/φe×100%
(2)
etr=|φe-φc|/φc×100%
(3)
2.3 性能評定方法
獲取到性能指標(biāo)參數(shù)后,需對控制性能進(jìn)行評價。為判斷性能是否滿足設(shè)計要求,應(yīng)事先制定一個基本標(biāo)準(zhǔn),即基本指標(biāo)區(qū)間。若指標(biāo)在該區(qū)間內(nèi),則認(rèn)為性能合格;若不在區(qū)間內(nèi),則認(rèn)為設(shè)計性能不合格。在性能合格情況下,還可以進(jìn)一步劃分性能等級,即將基本指標(biāo)區(qū)間分為幾個等級區(qū)間。通過將獲取的指標(biāo)對照各個等級區(qū)間,確定各指標(biāo)所在等級,并明確各等級所對應(yīng)的性能含義,達(dá)到更加細(xì)化性能優(yōu)異的目的。
按照上述評價性能的思路,需給出所評估性能的基本指標(biāo)區(qū)間、各等級區(qū)間及各等級含義。由于研究的高超聲速導(dǎo)彈在高速飛行過程中,要求控制系統(tǒng)作出既精確又快速的響應(yīng),對姿態(tài)操縱性能指標(biāo)的區(qū)間限定應(yīng)盡量小,因此,本文將基本指標(biāo)區(qū)間及各等級區(qū)間設(shè)定如表1所示,各等級的含義如表2所示。在后續(xù)仿真與試驗中,將依據(jù)表1與2中給出的性能評定標(biāo)準(zhǔn)對姿態(tài)控制性能進(jìn)行評定。
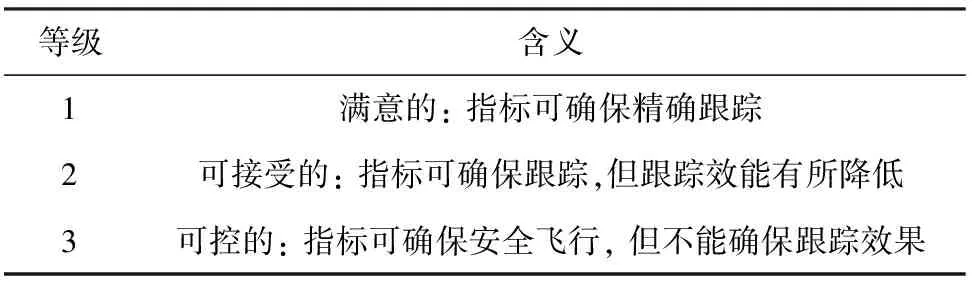
表2 各等級含義
3 評估方法仿真驗證
3.1 數(shù)學(xué)仿真方案
為驗證本文提出的基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法,可首先通過數(shù)學(xué)仿真模擬控制系統(tǒng)在風(fēng)洞中的試驗情形,對該評估方法進(jìn)行初步驗證。評估對象為某高超聲速導(dǎo)彈的俯仰控制系統(tǒng),其數(shù)學(xué)仿真方案如圖4所示。由于本文只關(guān)注姿態(tài)控制性能的評估,為簡化起見,忽略傳感器硬件與舵機(jī)硬件的模擬,不考慮試驗噪聲模擬和支撐裝置氣動干擾模擬,不考慮推力作用。
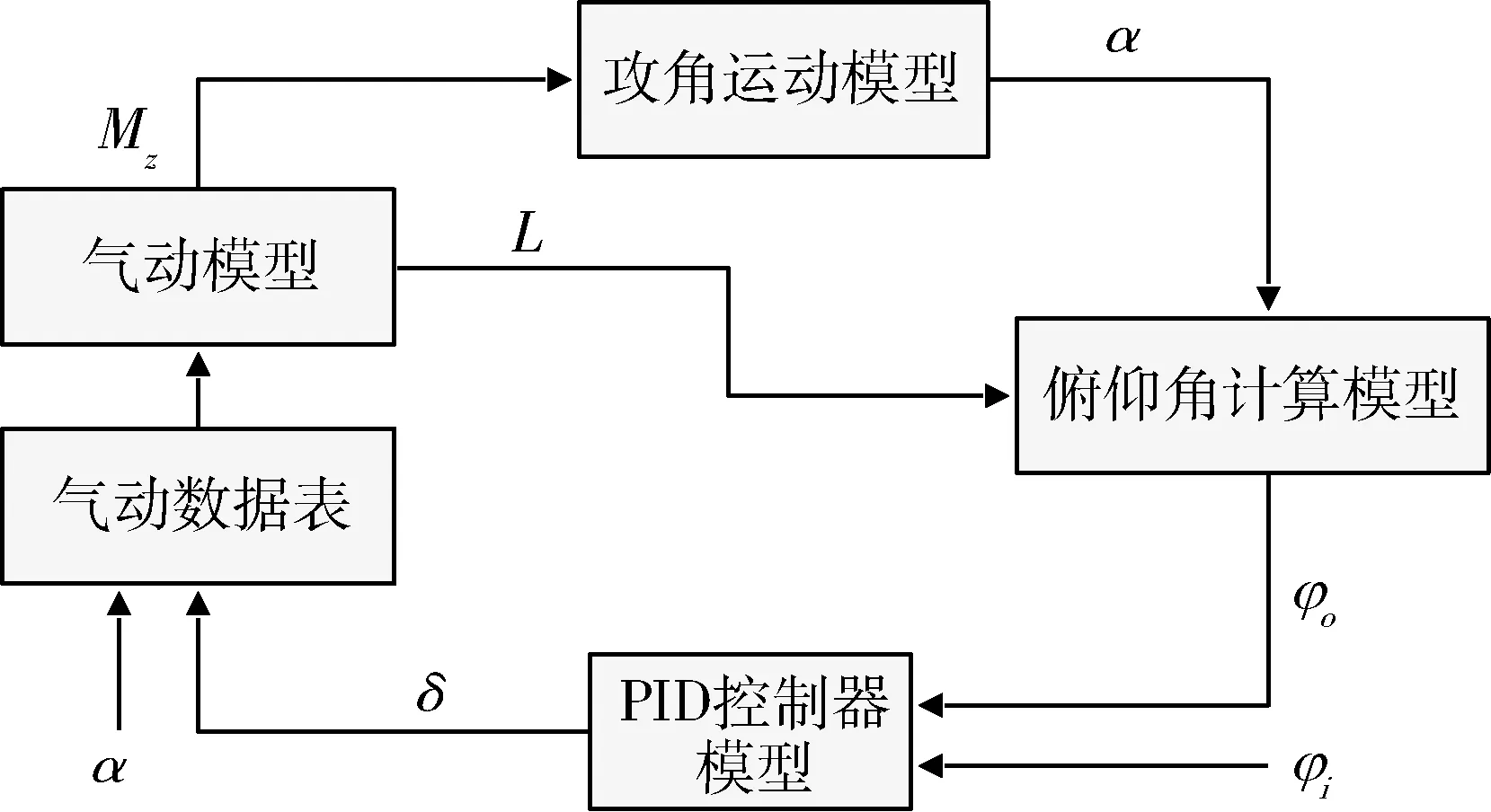
圖4 導(dǎo)彈俯仰控制系統(tǒng)數(shù)學(xué)仿真方案
下面介紹上述方案的仿真流程及所采用的各項模型:
此外,作品以含蓄的文體風(fēng)格凸顯出“冰山”的八分之七。作品中無論是景色的描寫、人物動作以及人物語言都是簡而概之。如“當(dāng)一大股暗黑色的血沉在一英里深的海里然后又散開的時候,它就從下面水深的地方躥上來。它游得那么快,什么也不放在眼里,一沖出藍(lán)色的水面就涌現(xiàn)在太陽光下。”這段描寫并沒有通過比喻或形容詞來渲染,但鯊魚的迅猛、兇狠以及當(dāng)時緊迫的局勢卻生動直觀地呈現(xiàn)在讀者腦海中,使人有身臨其境之感。
1)給控制器模型輸入俯仰角指令φi,形成舵控制指令δ。這里,所采用的控制器為PID控制器,其控制器結(jié)構(gòu)如圖5所示。
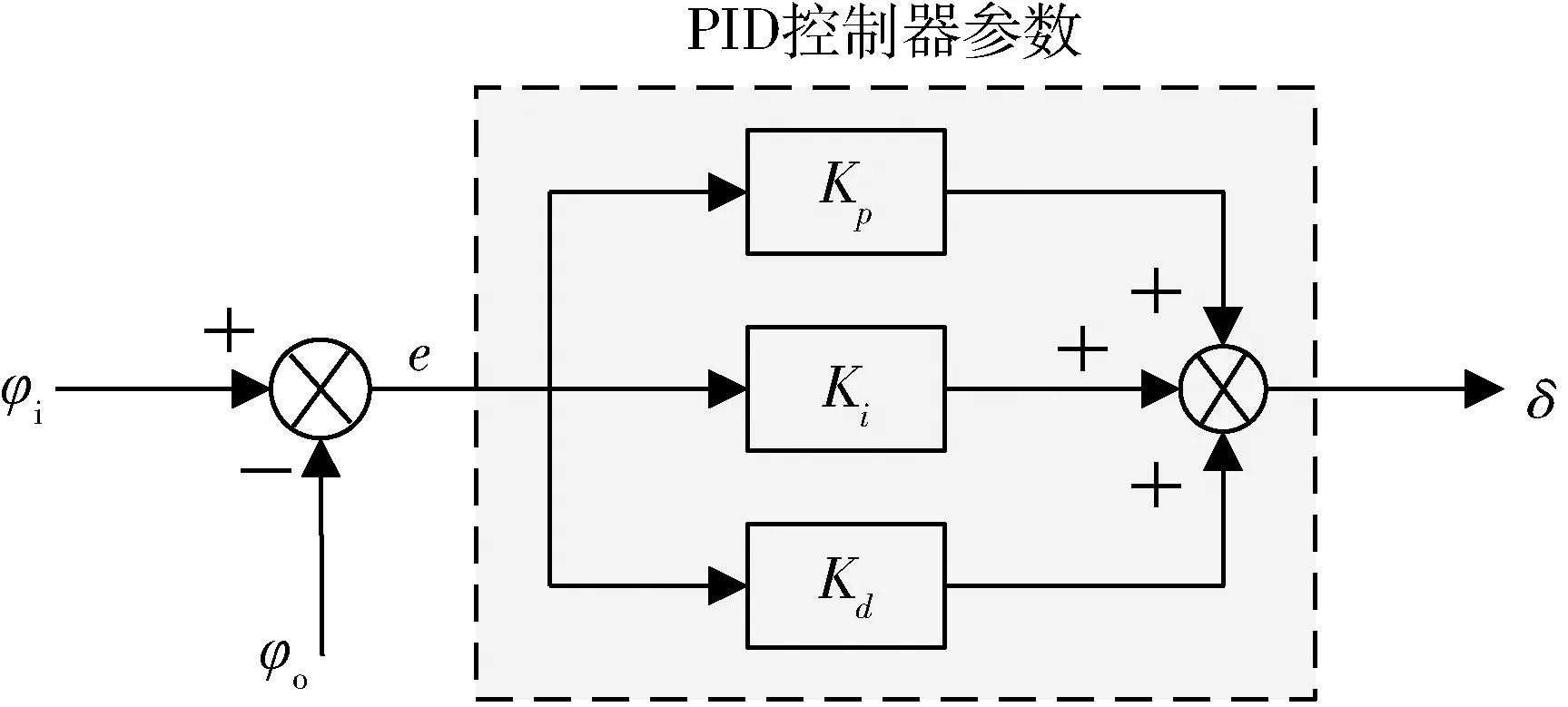
圖5 PID控制器結(jié)構(gòu)
上述控制器的工作原理是:根據(jù)期望的俯仰角輸入φi與俯仰角反饋量φo的誤差e,通過調(diào)整PID控制器的3個參數(shù),即控制器比例系數(shù)Kp,控制器積分系數(shù)Ki,控制器微分系數(shù)Kd,來調(diào)整舵控制指令δ。其數(shù)學(xué)模型[28]為:
(4)
2)舵控指令δ與由攻角運(yùn)動模型計算出的攻角α傳遞給氣動數(shù)據(jù)表和氣動模型,以計算對應(yīng)于特定攻角與舵偏角下的升力L與俯仰力矩Mz。它們的氣動力計算模型為:
(5)
式中,q為動壓;S為彈體最大橫截面積;l為彈體特征長度;ml、mzs和mzd分別為升力系數(shù)、俯仰靜導(dǎo)數(shù)和俯仰動導(dǎo)數(shù),均通過對照氣動數(shù)據(jù)表獲得。
3)通過氣動模型計算到的俯仰力矩Mz傳遞給攻角計算模型,以模擬導(dǎo)彈在風(fēng)洞中的俯仰轉(zhuǎn)動。其攻角計算模型[20]如式(6)所示:
(6)
式中,Iz為俯仰通道轉(zhuǎn)動慣量。
4)攻角一方面反饋給氣動數(shù)據(jù)表,一方面?zhèn)鬟f給俯仰角計算模型,結(jié)合氣動模型計算升力L,模擬數(shù)據(jù)采集系統(tǒng)對真實(shí)俯仰角的補(bǔ)償計算過程,其計算公式如式(1)所示。
5)將俯仰角φo反饋給控制器,以對舵偏角進(jìn)行修正,進(jìn)而調(diào)整俯仰運(yùn)動。
不斷循環(huán)上述過程,即可實(shí)現(xiàn)對導(dǎo)彈在風(fēng)洞中的俯仰轉(zhuǎn)動過程及其俯仰控制過程的仿真模擬。
3.2 仿真驗證
姿態(tài)控制試驗的仿真模擬與性能評估按以下步驟進(jìn)行。
1)姿態(tài)操縱試驗仿真。選取飛行特征點(diǎn):馬赫數(shù)Ma=5.0,高度H=20.0km。令控制器參數(shù)為:Kp=80,Ki=10,Kd=5。設(shè)定初始攻角、初始攻角速率、初始速度傾角均為0。當(dāng)φi輸入為負(fù)時,設(shè)定初始舵控制指令為1°;當(dāng)φi輸入為正時,設(shè)定初始舵控制指令為-1°。分別進(jìn)行了φi輸入為-1°和1°下姿態(tài)控制試驗的數(shù)學(xué)仿真,獲得俯仰角變化曲線如圖6所示。
2)性能指標(biāo)計算。從圖6中,分別讀出:-1°輸入下的φm1=-1.31°,φe1=-1.029°,ts1=0.56s;1°輸入下的φm2=1.19°,φe2=0.989°,ts2=0.56s。
進(jìn)一步計算到-1°輸入下姿態(tài)控制性能的超調(diào)量指標(biāo)與穩(wěn)態(tài)誤差指標(biāo)分別為:
σ1=|-1.31°-(-1.029°)|/(-1.029°)×100%=27.3%
etr1=|-1.029°-(-1°)|/(-1°)×100%=2.9%
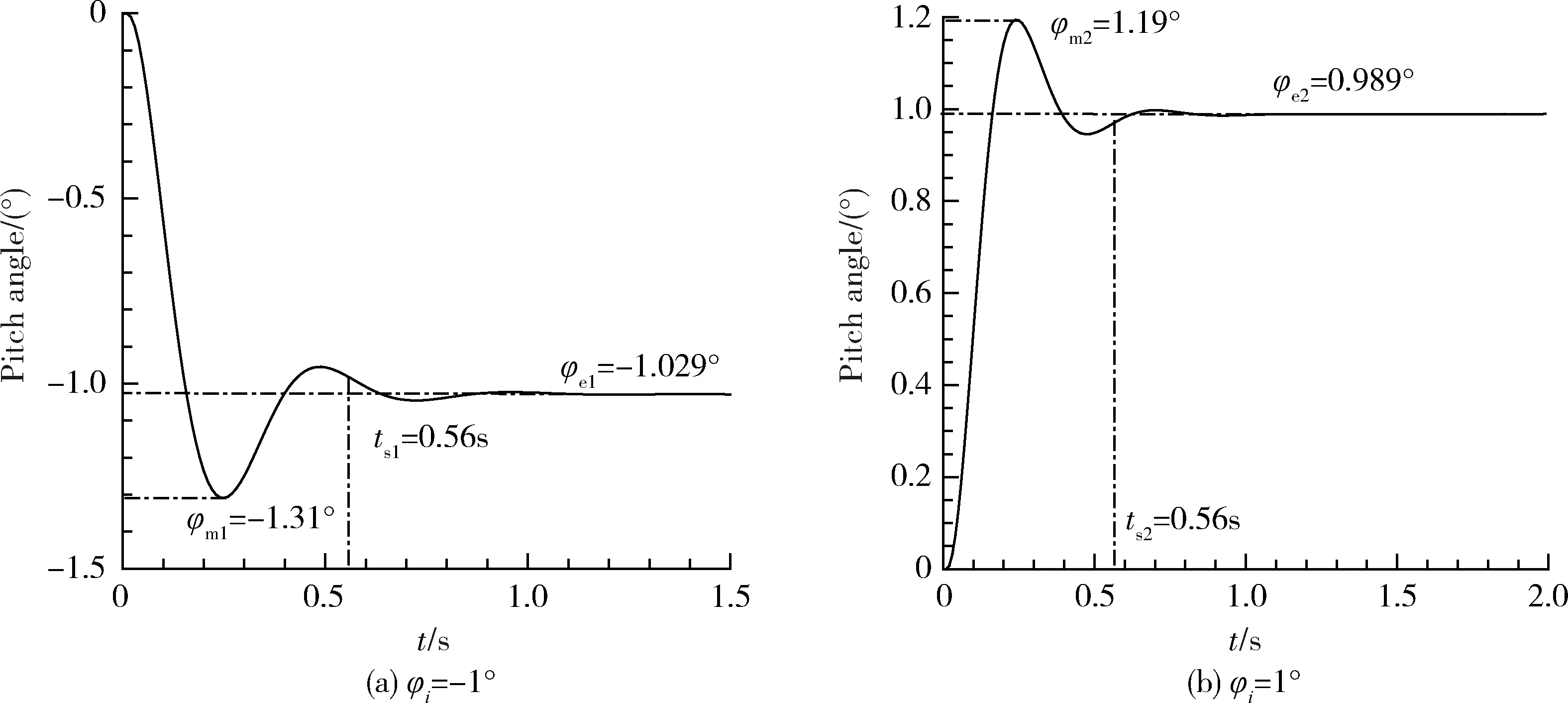
圖6 姿態(tài)控制試驗俯仰角響應(yīng)曲線
計算到1°輸入下姿態(tài)控制性能的超調(diào)量指標(biāo)與穩(wěn)態(tài)誤差指標(biāo)分別為:
σ2=|1.19°-0.989°|/0.989°×100%=20.3%
etr2=|0.989°-1°|/1°×100%=1.1%
3)性能評定與分析。參照表1所示性能評定標(biāo)準(zhǔn),評定不同俯仰角輸入下的姿態(tài)控制性能等級如表3所示。將各指標(biāo)等級對照表2可知,當(dāng)俯仰角輸入為-1°和1°時,控制器能確保系統(tǒng)有效跟蹤輸入指令,說明俯仰控制系統(tǒng)的姿態(tài)操縱性能是基本滿意的,但仍有改善空間,通過調(diào)整控制器參數(shù),減小過渡時間,將使俯仰角追蹤性能更佳。
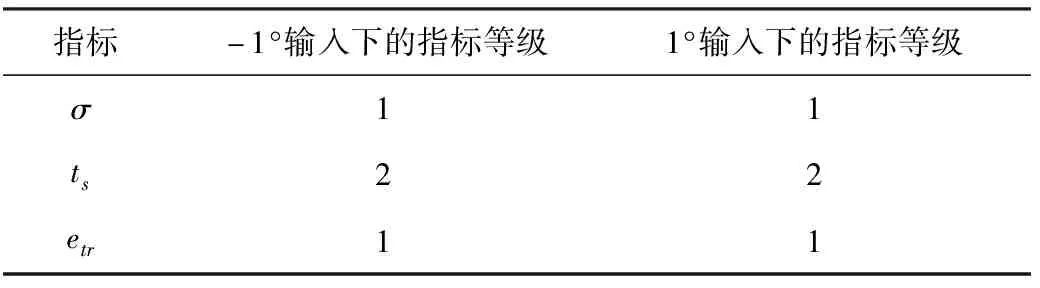
表3 不同輸入下的姿態(tài)控制性能評定結(jié)果
根據(jù)上述對導(dǎo)彈姿態(tài)控制性能的成功評定,可以初步判斷,提出的基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法是可行的。
4 結(jié)論
針對導(dǎo)彈姿態(tài)控制性能的評估,研究了一種基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法。首先,以導(dǎo)彈俯仰控制系統(tǒng)為例,列出了典型導(dǎo)彈姿態(tài)控制性能及其指標(biāo)。其次,提出了基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法,包括試驗方法、數(shù)據(jù)處理方法與性能評定方法,試驗方法中,給出了評估姿態(tài)控制性能所采用的試驗系統(tǒng)方案,并基于該系統(tǒng)方案,給出了開展基于風(fēng)洞的姿態(tài)控制試驗的試驗原理;數(shù)據(jù)處理方法中,給出了根據(jù)試驗獲得數(shù)據(jù)計算到姿態(tài)控制性能指標(biāo)的方法;性能評定方法中,給出了評定姿態(tài)控制性能的評價準(zhǔn)則,列出了各性能指標(biāo)對應(yīng)的基本區(qū)間要求和性能等級要求,這些指標(biāo)要求僅用于仿真演示論證,不針對特定飛行器。
最后,以某高超聲速導(dǎo)彈為例,通過建立基于風(fēng)洞的導(dǎo)彈姿態(tài)控制試驗仿真模型,對所提出的評估方法進(jìn)行了仿真驗證。開展了不同俯仰角輸入下的姿態(tài)控制試驗仿真,參照評估方法,得到了超調(diào)量、過渡時間及跟蹤誤差3項指標(biāo)的等級,對姿態(tài)控制性能的優(yōu)異進(jìn)行了界定,給出了控制系統(tǒng)改進(jìn)方向,初步驗證了基于風(fēng)洞的導(dǎo)彈姿態(tài)控制性能評估方法。由于仿真僅是對基于風(fēng)洞的導(dǎo)彈姿態(tài)運(yùn)動的近似模擬,與真實(shí)情形仍有差距,后續(xù)工作將設(shè)計和開展動態(tài)風(fēng)洞試驗,進(jìn)一步驗證本文所提出的評估方法。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56