基于電力載波的大棚灌溉控制系統研究
2020-04-30 08:03:48丁潔瑾陳進熹
時代農機 2020年1期
關鍵詞:信號
丁潔瑾,陳進熹
(1.浙江同濟科技職業學院,浙江 杭州 311231;2.杭州職業技術學院,浙江 杭州 310018)
傳統的農業灌溉方式存在著巨大的水資源浪費,目前我國近一半的水資源在灌溉過程中被浪費。國務院批復的《全國水資源綜合規劃》中指出,到2030年,全國用水總量力爭控制在7000億立方米以內,農田灌溉水有效利用系數提高到0.6[1]。隨著5G時代的到來,現代化的智慧農業灌溉也將成為提高灌溉水利用率、科學精細化管理農作物生長的重要手段之一,信息化的應用將有效降低蔬菜種植風險,提高蔬菜產量[2]。
我國溫室大棚生產方式大部分還處于粗放式管理階段,灌溉是目前農業生產管理中較為棘手的問題。傳統人工灌溉既浪費人力,又不能精準把握農作物的需水情況,需要依靠傳統種植積累的經驗,我國農業現代化水平遠遠落后于美國、德國、加拿大、澳大利亞等發達國家[3]。
目前有不少關于大棚參數智能控制系統的研究[4-8],本研究結合我國南方塑料蔬菜大棚的特點[9],在現有大棚的基礎上,以低成本、易使用、智能化為目標,利用電力載波作為大棚灌溉的通訊手段,利用ATmega2560作為灌溉節點的控制器,完成大棚灌溉節點的集中控制,實現智慧化的大棚節水灌溉系統管理。
1 控制系統整體設計
目前實現大棚灌溉的組網方法主要有有線通訊和無線通訊兩種,有線通訊傳輸穩定可靠,但需要鋪設專用的通訊線纜,成本較高不適宜推廣。無線通訊(主要有無線局域網和運營商網絡)克服有線通訊需要鋪設專用通訊線纜的問題,但也存在很多問題,無線局域網覆蓋范圍小,信號不穩定,且需要維護,運營商網絡后期使用成本較高。所以現有的有線通訊網絡和無線通訊網絡都不太適用于大棚灌溉場合。電力載波是以電力線作為通訊介質的通訊手段,通過利用大棚中原來用于照明、溫度測量等場合電力線作為通訊線纜,在不增加通訊線纜的前提下實現灌溉節點的組網。
本系統采用經濟實用型控制主板Arduino Meag2560控制板、電力載波傳輸模塊、土壤濕度傳感器、空氣溫度傳感器和其他傳感器組成,其中ATmeag2560主控芯片是系統控制中心,負責把采集上來的數據按照定義好的通信協議發送給上位機,數據主要包括大棚土壤的濕度和溫室空氣的溫度等。控制系統原理圖如圖1所示。

圖1 控制系統原理圖
2 硬件電路設計
大棚灌溉系統整體方案采用一主多從的通訊方式進行,一個通訊網絡內包含一個主站和最多65534個從站。主站和從站的硬件結構類似,主站主要用于從站數據的采集和處理,從站主要用于土壤濕度、空氣溫度等數據的采集和流量控制,網絡系統架構圖如圖2所示。
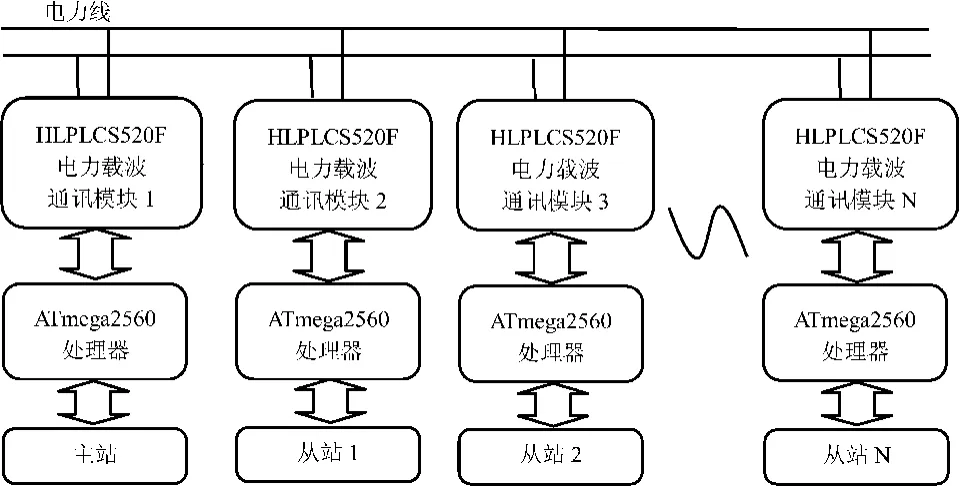
圖2 基于電力載波的大棚灌溉網絡系統
每個網絡節點主要由主控制器和通訊模塊組成,主控制芯片都采用ATmega2560,通訊部分采用HLPLCS520F作為電力載波調整解調模塊。ATmega2560用來做傳感信號、控制信號的處理和數據傳輸,HLPLCS520F的主要作用是進行載波信號的調制解調、協議處理和外設控制。每個網絡節點除處理器和載波模塊外還包括發送和接受的外圍電路,主要作用是使數據放大驅動[10]。
HLPLC520F電力載波模塊與處理器相連,用串口進行數字量交換,HLPLCS520F內部架構如圖3所示。控制器邏輯輸出接繼電器等邏輯控制設備,數字信號輸出進行土壤濕度測量和其它有需要的傳感器。HLPLC520F電力載波模塊的調制解調電路包括調制解調器、數據交互接口、載波信號發送及接收濾波放大電路。

圖3 系統電路框架圖
本系統采用FSK載波調制解調方式,規定信號1為111kHz頻率,信號0為109kHz頻率。在確定頻率后設計輸入輸出電路。在信號輸出環節需要對信號進行放大,取111kHz和109kHz信號的中值110kHz為目標頻率進行輸出放大,提高信號的輸出功率。采用如圖4所示的濾波及放大電路對輸出信號進行放大。采用基于MOS管的D類放大器作放大電路,放大器原理圖如圖4所示。

圖4 發送端電路設計
FSK_OUT為載波信號輸出端,信號經過放大電路后形成方波信號,再通過濾波電路(C1、L1)輸送到電力線上。L1和C1組成的LC串聯諧振電路,可以對信號起到選頻的作用,針對110kHz頻率進行計算,根據諧振頻率計算公式算出L1和C1的值。

f0為諧振的中心頻率,為110kHz。為提高LC串聯諧振電路的選頻能力,在合理范圍內選取LC串聯電路的品質系數Q,Q的計算公式為:

當Q取100,計算得L1值取10uH,C1值取200nF。還需要設計載波信號的接收電路,電力線上會許多雜波,通過接收濾波電路進行過濾,采用LC并聯諧振電路作為接收端濾波電路[11],如圖5所示。

圖5 FSK信號接收濾波器
R2為接收端的等效內阻,取值500Ω。LC并聯諧振Q值計算公式為:

兼顧濾波器選頻能和元器件選型,將Q值設定為100。計算LC并聯諧振電路的L2和C2的值,經計算得L2值為10uH,C2的值為300nF。
3 通訊協議設計
大棚節水灌溉系統的通訊方式采用一主多從的方式,每個網絡有一個主站和最多65534個從站。為了保證系統的實時性,只允許主站與從站進行數據交換,不允許從站與從站之間進行數據交換。大棚節水灌溉系統的通訊網絡可以劃分為三層:物理層、數據鏈路層和應用層,通訊網絡如圖6所示。

圖6 基于電力載波的大棚灌溉系統通訊網絡
由于電力線噪聲較大,為了準確的區分噪聲信號和數據信號,在數據幀起始部分加入16位的報文頭。同時為了數據準確的到達目標節點,在報文頭后面跟隨16位的地址信號。在地址信號后面跟隨的是2位控制信號,用以說明后面的數據的作用,完整的數據幀如圖7所示。

圖7 大棚節水灌溉網絡通訊數據幀
幀頭部分的報文頭為固定格式95A3H,主站通過報文頭通知大棚灌溉系統的從站點開始接收信號。地址段是一個16位的數據,總共有65536個地址容量,除去主站地址和廣播地址外還可以容納65534個從站,足以滿足大棚灌溉的需求。控制段是一個2位代碼,用來區分后面數據的作用。數據段是信息傳輸的主體,主站通過數據控制從站設備執行需要的操作。由于電力線上干擾信號較多,數據容易出錯,系統采用海明碼對傳輸的信號進行校驗,主要校驗信息段為地址段、控制端和數據段。通過5位海明碼對26位數據進行校驗,海明距離達到3,能檢測出兩個錯誤位,同時還能修正一個錯誤位,保證前面數據的穩定可靠。
為了實現大棚節水灌溉系統從站節點的即插即用,在通訊協議中設計了新設備接入機制。利用分槽式ALOHA方法把通訊信道(電力線)按時間分成若干個槽點,新接入網的灌溉節點只能在主機發出新設備尋址指令后在特點的時間槽內發出信號與主站對話,保證新從站與原有網絡上的從站以及新從站之間不會沖突,如表1所示。

表1 新灌溉節點無沖突訪問
主站在完成一次原有灌溉節點輪詢后會發起一次新設備訪問,主站發出地址段為0x00的特殊幀,原網絡上的灌溉節點不會應答該信號,新灌溉節點在收到地址為0x00的特殊幀后會在接下來的4個時間槽內隨機選擇一個時間槽發出應答幀[12],主站收到應答幀后會發送配置幀,新入網的從站從配置幀中獲取地址等信息并發出配置成功的應答幀,完成新從站的配置。
如果新入網有多個從站,檢測到其它從站已發其應答幀后將放棄該次主站發起的新設備訪問等待下一周期,如果兩個從站在同一時間槽內發起應答幀,如表2所示,主站在檢測到有沖突后將放棄該次新設備訪問等待下一周期。通過分槽式ALOHA方法,實現大棚節水灌溉從站點的即插即用,提高電力載波灌溉系統在不同應用場合的適應能力。

表2 新灌溉節點有沖突訪問
4 結語
針對大棚灌溉水利用率低、精細化控制成本高,本研究采用電力載波通訊技術,即插即用,利用Arduino Meag2560控制技術,能夠對溫室大棚中的溫度、濕度等環境參數進行采集,按照作物適于生長條件進行有效灌溉控制,對作物進行精細化種植管理。針對現有塑料蔬菜大棚,本系統具有安裝方便、性能穩定、經濟實用等特點,具有較高的市場使用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
