空間索桿張拉結構施工全過程分析
——以某會展中心魚腹梁施工為例
2020-04-30 07:52:46吳武玄
福建建筑
2020年3期
吳武玄
(福州市建筑科學研究所 福建福州 350000)
0 引言
索桿張力結構施工成形分析需要解決一個松弛態索桿系統的平衡形態求解問題,該問題可歸結為一個給定構件原長的受荷索桿機構系統的找形問題[1-2]。在索桿張拉結構施工全過程分析中,體系由剛度為零到具有很大的剛度,索由只承受自重到拉索繃緊,整個體系的分析,既有機構分析又有力學分析,實際上包含了找形分析和找力分析的過程[3]。
本文結合某會展中心魚腹梁索桿張拉結構,采用MIDAS/Civil程序對魚腹梁施工成形和施工控制方案進行分析[4-5],以期為施工安裝提供參考依據。
1 工程概況
1.1 項目基本概況
某會展中心主要功能包含展覽中心、會議中心及配套功能設施用房。地下1層,地上3層,局部設置夾層,建筑高度約為33m,局部挑高至45m,總建筑面積約為11.28萬m2,其中地上建筑面積約8.2萬m2,地下建筑面積約3.1萬m2,其效果圖如圖1所示。

圖1 某會展中心效果圖
1.2 項目結構型式
該工程主體為裝配式鋼結構,在主要出入口處根據建筑外觀需求在標高為+16.000m~+32.000m間平均設置三道魚腹梁,跨度為34m,如圖2所示。魚腹梁截面型式如圖3所示,共由16組索桿張拉成型,其中4組為直徑32mm(魚腹位置),12組為直徑26mm(除魚腹位置外其余索桿),索桿均為圓形拉索,材料屈服強度不小于515MPa。

圖2 標高在+16.000m~+32.000m間設置三道魚腹梁
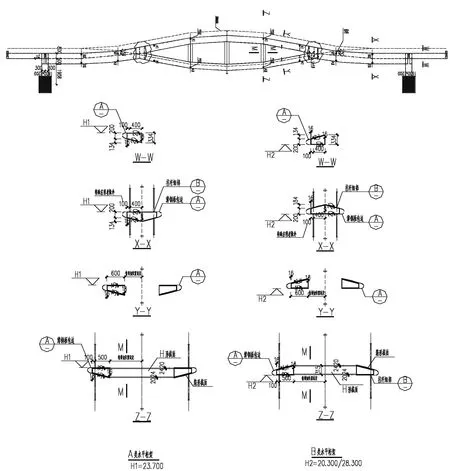
圖3 魚腹梁截面型式
2 施工過程數值模擬及分析
2.1 數值模擬分析模型
采用MIDAS/Civil軟件進行正裝施工過程分析。建模時,其中梁、柱、魚腹梁構件采用梁單元,索桿采用索單元,胎架只起受壓作用,直接采用彈性連接進行模擬,底層柱底固接。……
登錄APP查看全文
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
