基于Matlab/FlightGear的四旋翼無人機(jī)仿真實(shí)驗(yàn)平臺設(shè)計
2020-04-30 06:49:45張明家馮秀
無線互聯(lián)科技 2020年6期
張明家 馮秀
摘 ? 要:文章以六自由度四旋翼無人機(jī)模型為基礎(chǔ),設(shè)計并建立了基于FlightGear的仿真實(shí)驗(yàn)平臺。該平臺基于Matlab/Simulink實(shí)現(xiàn)無人機(jī)模型及控制系統(tǒng)的仿真設(shè)計,使用Stateflow實(shí)現(xiàn)無人機(jī)起飛、軌跡跟蹤飛行、返航、降落的模式切換,并與FlightGear進(jìn)行對接,實(shí)現(xiàn)完整飛行場景下四旋翼無人機(jī)的三維實(shí)時可視化顯示。
關(guān)鍵詞:四旋翼無人機(jī);FlightGear;模式切換;仿真實(shí)驗(yàn)
近年來,無人機(jī)應(yīng)用行業(yè)處于快速發(fā)展階段,國內(nèi)職業(yè)院校紛紛開設(shè)無人機(jī)應(yīng)用技術(shù)專業(yè)。無人機(jī)組裝與調(diào)試是無人機(jī)應(yīng)用技術(shù)專業(yè)的一門重要專業(yè)基礎(chǔ)課程。無人機(jī)的調(diào)試通常在地面站軟件中進(jìn)行,包括安裝固件、機(jī)架選型、遙控器校準(zhǔn)、電調(diào)校準(zhǔn)、電機(jī)測試、飛行模式設(shè)置、調(diào)節(jié)比例—積分—微分(Proportion Integral Differential,PID)參數(shù)等步驟[1]。但在進(jìn)行飛行模式設(shè)置與調(diào)節(jié)PID參數(shù)時,無法直接查看調(diào)試效果,需要實(shí)際飛行后再進(jìn)行反復(fù)調(diào)試,效率較低且存在一定的安全隱患。針對此問題,本文采用仿真可視化技術(shù),搭建無人機(jī)調(diào)試實(shí)驗(yàn)平臺,實(shí)時顯示無人機(jī)的姿態(tài)和位置信息,幫助學(xué)生加深對無人機(jī)飛行控制過程的理解和掌握。
1 ? ?實(shí)驗(yàn)平臺的建立
1.1 ?控制器設(shè)計
本文采用的四旋翼無人機(jī)是“X”字型,電機(jī)分為兩組,1號和3號電機(jī)順時針旋轉(zhuǎn),2號和4號電機(jī)逆時針旋轉(zhuǎn),通過不同的油門指令,使其具備俯仰、橫滾、偏航、縱向運(yùn)動狀態(tài)[1]。
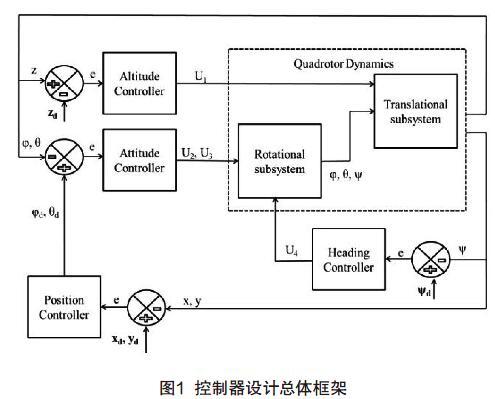
本文的無人機(jī)在螺旋槳產(chǎn)生的外力和力矩作用,形成線運(yùn)動和角運(yùn)動,輸入航跡點(diǎn)數(shù)據(jù)模擬無人機(jī)的期望位置值,采用串級PID算法實(shí)現(xiàn)位置控制器,使無人機(jī)實(shí)際位置與期望位置保持一致,同時,將期望位置轉(zhuǎn)換為期望角度作為姿態(tài)控制器的輸入值,姿態(tài)控制器輸出控制量信號作為油門指令輸入到系統(tǒng)模型中,最終確立油門指令與無人機(jī)位置和姿態(tài)之間的映射關(guān)系[2]。控制器設(shè)計總體框架如圖1所示。
1.2 ?飛行模式切換
四旋翼無人機(jī)的半自主飛行功能,包含遙控器指令和飛行器自身事件變化觸發(fā)無人機(jī)的飛行狀態(tài)發(fā)生改變。通常四旋翼無人機(jī)遙控器上的飛行模式開關(guān)包含以下幾種功能:定高飛行、自穩(wěn)飛行、一鍵返航、自動著陸、留待模式[2]。
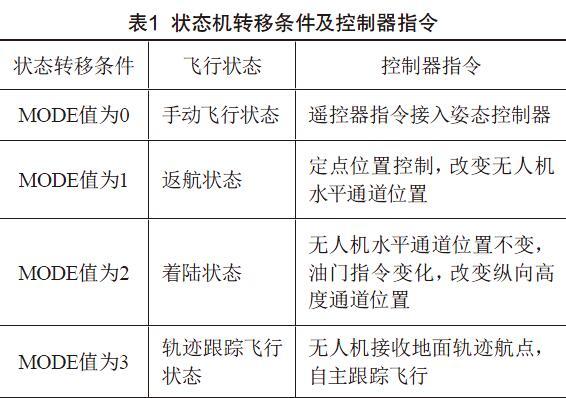
本文基于Stateflow工具箱在仿真系統(tǒng)中利用狀態(tài)機(jī)實(shí)現(xiàn)四旋翼無人機(jī)的模式切換,從而驗(yàn)證各種飛行模式下以及模式切換過程中,系統(tǒng)模型及控制系統(tǒng)的工作狀態(tài)、穩(wěn)定性及性能。狀態(tài)機(jī)轉(zhuǎn)移條件及控制器指令如表1所示。
1.3 ?FlightGear的連接
FlightGear是一個開源的三維飛行模擬軟件,提供了豐富的輸入輸出接口,可以輸入輸出儀表數(shù)據(jù)、操縱數(shù)據(jù)等,配置簡單,并且可以在Simulink中通過運(yùn)行腳本文件直接調(diào)用[3]。本平臺采用Simulink庫中的“Pack net_fdm Packet for FlightGear”模塊將仿真得到的無人機(jī)姿態(tài)、位置等數(shù)據(jù)封裝起來,通過“Send net_fdm Packet to FlightGear”模塊將數(shù)據(jù)通過UDP接口發(fā)送給FlightGear。在腳本文件中設(shè)置FlightGear的輸入輸出接口[3],其中,Protocol設(shè)置為Native-fdm,Medium設(shè)置為socket;Hz設(shè)置為30,Direction設(shè)置為in,端口選擇5502,選擇UDP模式。腳本內(nèi)容如下所示:
--native-fdm=socket,in,30,127.0.0.1,5502,udp
--native-ctrls=socket,out,30,127.0.0.1,5505,udp
配置完成后,即可在仿真平臺上實(shí)時顯示無人機(jī)三維模型的飛行效果。
2 ? ?實(shí)時仿真實(shí)驗(yàn)演示
2.1 ?PID參數(shù)調(diào)節(jié)實(shí)驗(yàn)
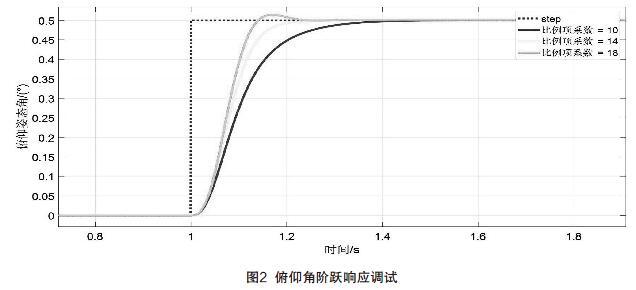
常規(guī)的PID控制由比例項(xiàng)(P)、積分項(xiàng)(I)、微分項(xiàng)(D)3部分組成。串級PID控制器的參數(shù)調(diào)節(jié)可分為內(nèi)環(huán)參數(shù)調(diào)節(jié)、外環(huán)參數(shù)調(diào)節(jié),以無人機(jī)單通道姿態(tài)(俯仰)控制系統(tǒng)為例,采用試湊法,分別對比例項(xiàng)參數(shù)、積分項(xiàng)參數(shù)、微分項(xiàng)參數(shù)進(jìn)行修改。實(shí)驗(yàn)結(jié)果如圖2所示。
(1)比例項(xiàng)參數(shù)的影響:由小變大,響應(yīng)速度加快,超調(diào)量變大,穩(wěn)定性變?nèi)酢#?)積分項(xiàng)參數(shù)的影響:積分環(huán)節(jié)消除穩(wěn)態(tài)誤差,過大的積分會造成超調(diào)。積分會造成響應(yīng)滯后,積分的飽和作用。(3)微分項(xiàng)參數(shù)的影響:引入阻尼,減小系統(tǒng)超調(diào)量,調(diào)節(jié)時間變長,放大系統(tǒng)噪聲,抗干擾能力減弱。PID參數(shù)調(diào)節(jié)過程,通常是取3部分的折中,解決控制系統(tǒng)的穩(wěn)定性與準(zhǔn)確性的矛盾。
此平臺還可以開設(shè)的實(shí)驗(yàn)項(xiàng)目有:(1)單通道姿態(tài)(滾轉(zhuǎn)、俯仰、偏航)控制系統(tǒng)仿真實(shí)驗(yàn)。(2)高度控制系統(tǒng)仿真實(shí)驗(yàn)。(3)橫側(cè)向姿態(tài)控制系統(tǒng)仿真實(shí)驗(yàn)。
2.2 ?飛行模式切換實(shí)驗(yàn)
四旋翼無人機(jī)的模式切換仿真得到的實(shí)驗(yàn)數(shù)據(jù),可以觀察對應(yīng)的位置變化過程,如圖3所示。起始階段MODE值為0,無人機(jī)根據(jù)遙控器指令手動飛行,1 s后MODE值切換為3,進(jìn)行軌跡跟蹤飛行,經(jīng)過正方形航跡點(diǎn)P1(0, 0, -50),P2(-50, 0, -50),P3(-50, 25, -50),P4(-50, 50, -50),P5(-25, 50, -50),P6(0,50, -50),P7(0, 25, -50),P8(0, 0, -50)完成軌跡跟蹤飛行后,MODE值切換為1,進(jìn)入返航狀態(tài),到達(dá)終點(diǎn)位置上方后,MODE值切換為2,進(jìn)入降落狀態(tài),飛行到達(dá)終點(diǎn)。
跟隨無人機(jī)模式的切換,可以實(shí)時查看四旋翼無人機(jī)在空中飛行姿態(tài)以及位置的變化,非常直觀和方便。FlightGear運(yùn)行場景如圖4所示。
3 ? ?結(jié)語
在該仿真實(shí)驗(yàn)平臺上,可以開展四旋翼無人機(jī)的控制器調(diào)參實(shí)驗(yàn)、飛行模式切換實(shí)驗(yàn),不受空間和時間的限制,同時,可以規(guī)避實(shí)物調(diào)試以及試飛可能帶來的安全風(fēng)險。通過三維立體實(shí)時顯示,讓學(xué)生對無人機(jī)調(diào)試效果有直觀地認(rèn)識和理解,對無人機(jī)飛行控制過程有一個全面、系統(tǒng)的把握,完成無人機(jī)飛行全過程的模擬與驗(yàn)證,為后續(xù)的無人機(jī)開發(fā)與設(shè)計等課程打下堅實(shí)的基礎(chǔ)。
[參考文獻(xiàn)]
[1]QUAN Q.Introduction to multicopter design and control[M].Singapore:Springer Materials,2017.
[2]黃芳艷,劉永福,林鎮(zhèn)滔,等.基于四旋翼無人機(jī)的組裝與調(diào)試研究[J].科技與創(chuàng)新,2019(16):38-39.
[3]楊姍姍,王彪.基于FlightGear的三維可視化飛行控制仿真實(shí)驗(yàn)平臺的設(shè)計[J].實(shí)驗(yàn)室研究與探索,2017(7):113-117.
Design of simulation experiment platform of quad-rotor UAV based on Matlab/FlightGear
Zhang Mingjia, Feng Xiu
(Nanjing Polytechnic Institute, Nanjing 210048, China)
Abstract:Based on a six-degree quad-rotor UAV, a simulation experimental platform based on FlightGear is presented in this paper. The platform implements the simulation design of UAV model and control system based on Matlab/Simulink. The model switching of UAVs take-off, track tracking, auto-return and landing flight is realized based on Stateflow tools, and the 3D real-time visualization of the quad-rotor UAV under the complete flight scene is implemented by using FlightGear simulator.
Key words:quad-rotor unmanned aerial vehicle; FlightGear; model switch; simulation experiment